
Fターム[3F115CA40]の内容
パッケージ・線条体の安全装置 (910) | 目的、機能 (242) | 異常に対する安全対策 (150) | 異常停止 (8)
Fターム[3F115CA40]に分類される特許
1 - 8 / 8
糸巻取装置
【課題】パッケージの駆動と糸のトラバースとが独立した糸巻取装置において、トラバース検出部を複数設ける必要性をなくし、コストを低減すること。
【解決手段】パッケージ83を巻き取る巻取部200と、パッケージ83の駆動に対して独立して駆動され、パッケージ83に巻き取られる糸Yをトラバースするトラバースガイド17と、トラバースガイド17のトラバース幅の中央部に設けられ、糸Yの有無を検出するトラバース検出部70と、を備えた糸巻取装置100とする。
(もっと読む)
糸巻取機、及び繊維機械

【課題】本当に必要な作業と、オペレータによって行われる作業と、の不一致を解消し、もって、糸巻取機の生産性を向上する技術を提供する。
【解決手段】少なくとも給糸源に起因した異常状態が発生したことを起点に定常表示から異常表示に切り替えられ、前記異常表示時に操作されることによって定常表示に切り替えられると共に、機台を停止状態から運転状態に切り替える第1の異常表示兼リセット部と、少なくとも巻取ボビンに起因した異常状態が発生したことを起点に定常表示から異常表示に切り替えられ、前記異常表示時に操作されることによって定常表示に切り替えられると共に、機台を停止状態から運転状態に切り替える第2の異常表示兼リセット部と、を備えた。
(もっと読む)
紡績機
【課題】供給されるスライバが無くなったことを紡績ユニットごとに迅速に検出できる紡績機を提供する。
【解決手段】精紡機は紡績ユニット2を複数備えるとともに、この紡績ユニット2に供給されるスライバ13が無くなったことを紡績ユニット2ごとに検知できるスライバ検知センサ60を備える。このスライバ検知センサ60は、ドラフト装置7の上流側でスライバ13を検知する。また、精紡機は、スライバ検知センサ60を変位させるためのベルトモータ62と、スライバ検知センサ60の位置を検出するためのエンコーダ61と、を備える。更に、精紡機は制御部40を備え、この制御部40は、エンコーダ61によって検出されたスライバ検知センサ60の位置に基づいて、スライバ13が無くなった紡績ユニット2を特定する。
(もっと読む)
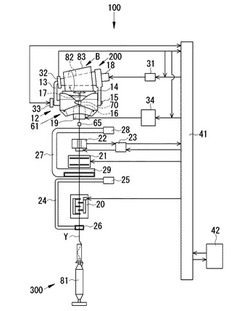
糸巻取装置
【課題】巻取パッケージに棒巻きなどによる異常な巻取状態が発生していることを迅速に精度良く検出する。
【解決手段】糸巻取ユニット2は、給糸ボビン3から解舒された糸4をトラバース装置5で綾振りさせながら巻取管6に巻取って、満巻のパッケージ7を形成する。パッケージ径センサ44により計測された実際径とパッケージ径予測部51により算出された予測径とを巻取状態検出部52により比較して、巻取パッケージ7への巻取状態を検出する。予測径は、巻取状態検出部52により巻取状態を検出する前に、パッケージ径センサ44により計測された巻取パッケージ7の径である基準径に基づいて算出する。基準径は、巻取開始時において、パッケージ径センサ44により計測された実際径に更新される。
(もっと読む)
繊維機械
【課題】各作業ユニットの状態を高精度に把握することが可能な繊維機械を提供すること。
【解決手段】自動ワインダの巻取ユニット2は、給糸ボビン4、巻取管7、糸継装置14、及び、毛羽伏せ装置13にそれぞれ設けられたICタグ40〜43から照合情報を取得し、その照合情報をユニットコントローラ32に送信するアンテナ35を備えている。そして、複数の巻取ユニット2を監視及び制御するホストコントローラ31は、アンテナ35で取得された情報に基づいて、各巻取ユニット2のICタグ40〜43が正規なものか否かを判断して、正規でない場合には、その巻取ユニット2に対して糸巻取処理を禁止する信号を出力する。
(もっと読む)
ワイヤレス接続されたセンサおよびアクチュエータを備える紡績機
本発明は、少なくとも1つのセンサと、少なくとも1つのアクチュエータを備える紡績機であって、前記センサは前記紡績機の動作状態を感知し、該動作状態を特徴づける信号を送出し、該信号は前記アクチュエータに供給され、該アクチュエータは前記信号に応じて措置を開始する、紡績機に関し、このとき少なくとも前記センサ(1)は、前記アクチュエータ(3)と無線接続(2)を介して接続されている。したがって、前記センサと前記アクチュエータの間の導電接続は必要ない。  (もっと読む)
(もっと読む)
糸巻取装置
【課題】糸巻取装置においてパッケージ7の品質低下を防止する。
【解決手段】巻取ボビン6,7を支持可能とするクレードル8と、巻取ボビン6,7に連結されるパッケージ駆動モータ41と、巻取ボビン6,7の周面に接触して従動回転可能な接触ローラ9と、を備える。クレードル駆動機構24は、巻取ボビン6,7の周面を接触ローラ9に接触させるリフトダウン位置と、接触ローラ9から離間させるリフトアップ位置と、にクレードル8を移動可能である。リフトアップ時において、接触ローラ9はブレーキ機構27により制動される。ブレーキ機構27に異常が生じて接触ローラ9の停止が不完全な場合、アラーム出力手段52は、リフトダウン時にパッケージ回転センサ43が接触ローラ9の慣性回転を間接的に検知し、アラーム信号を出力して警告ランプ61を点灯させる。
(もっと読む)
綾巻きパッケージを製造する繊維機械の作業部位を運転する方法
本発明は、綾巻きパッケージを製造する繊維機械の作業部位を運転する方法であって、綾巻きパッケージの巻取速度を調節するための回転数調整可能な巻取駆動装置が設けられており、供給ボビンから紡出される糸の糸張力を監視するための、作業部位計算機と接続された糸張力センサが設けられており、糸張力を調整するための糸テンショナが設けられている方法に関する。本発明によれば、作業部位計算機(32)で、所望の糸張力(FZKsoll)の値ならびに該所望の糸張力(FZKsoll)からの許容パーセント偏差の値(TG)を調節することができ、糸張力(FZKsoll)の許容パーセント偏差の超過が生じると、直ちに作業部位計算機(32)によって巻取過程を中断する。 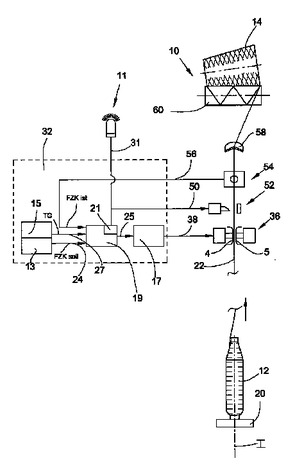 (もっと読む)
(もっと読む)
1 - 8 / 8
[ Back to top ]