
Fターム[3F204EB03]の内容
クレーンの細部(制御、安全) (2,955) | 振れ角検出器 (63) | 検出器の種類 (30) | 非接触式 (24)
Fターム[3F204EB03]の下位に属するFターム
Fターム[3F204EB03]に分類される特許
1 - 2 / 2
クレーンの振れ止め制御装置
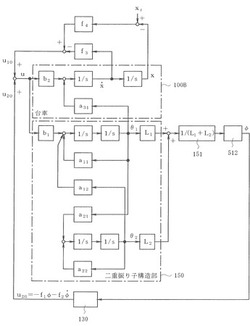
【課題】二重振り子構造、単振り子構造を含むクレーン搬送システムにおいて、速度パターンを持たずに、吊り荷の振れ止めを高精度に実現可能としたクレーンの振れ止め制御装置を提供する。
【解決手段】吊り荷及びその支持構造が単振り子構造または多重振り子構造を構成し、クレーン本体の台車を駆動して吊り荷を目標位置まで搬送するクレーン搬送システムにおいて、吊り荷503の振動による振れ角度を検出する振れ角センサ512と、吊り荷の速度検出値及び位置検出値をフィードバックして吊り荷を目標位置まで搬送するための第1の操作量を演算し、かつ、前記振れ角度を無線通信によりフィードバックして吊り荷の振れ止めを行うための第2の操作量を演算する演算制御手段としてのアシスト制御部101と、第1の操作量及び第2の操作量を加算して前記台車に与える手段と、を備える。
(もっと読む)
振れ角補正装置および振れ角補正方法

【課題】振れ角のオフセット量が外乱などで横行中に変化する場合においても、振れ角フィードバック制御の安定性を維持しつつ、振れ角を校正する。
【解決手段】オフセット検出部4は、吊り荷の振れ周期Tpの期間分だけサンプリング処理部3にてサンプリングされた振れ角検出値θdetを平均化することで、瞬時オフセット値θ0を検出し、平均化処理部5は、オフセット検出部4にて検出された瞬時オフセット値θ0を平均化することで、オフセット補償量θostを算出し、補償処理部7は、平均化処理部5にて算出されたオフセット補償量θostにて振れ角検出値θdetを補償する。
(もっと読む)
1 - 2 / 2
[ Back to top ]