
Fターム[3F204EB05]の内容
クレーンの細部(制御、安全) (2,955) | 振れ角検出器 (63) | 検出器の種類 (30) | 非接触式 (24) | 電気的;磁気的 (9)
Fターム[3F204EB05]に分類される特許
1 - 9 / 9
クレーンの吊り荷の振れ角度検出センサ
【課題】 巻き上げリミット用の重錘を利用した簡単な機構で高精度かつリアルタイムに吊り荷の振れ角を検出することができるクレーンの吊り荷の振れ角度検出センサを提供すること。
【解決手段】過巻き検出リミットスイッチ用の重錘11に設けたMEMS慣性センサ12をワイヤロープRの振れに追従させ、2本の非自転性ワイヤ13で鉛直軸4周りの回転を拘束しておき、クレーン起伏中心軸と平行な起伏軸2周りとこれと直交する水平な回転軸3周りの2軸の角度または角速度をMEMS慣性センサ12により、制御器での変換の必要をなくして、リアルタイムで精度良く検出するとともに、重錘11を利用することで装置をコンパクトにする。
(もっと読む)
クレーンの吊り荷の振れ角度検出装置

【課題】制御器での角度変換の必要がなく、検出ロッドの長さを一定以上に長くするなどの組み込みの制約もなく、コンパクトかつ簡単な機構で高精度かつリアルタイムに吊り荷の振れ角を検出することができるクレーンの吊り荷の振れ角度検出装置を提供する。
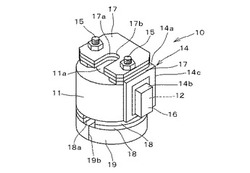
【解決手段】クレーン起伏中心軸と平行な起伏軸13周りとこれと直交する水平な旋回軸14周りの2軸の角度または角速度を検出するMEMS慣性センサが設けられた検出器本体17をクレーン先端部1から吊り下げ部材16を介して吊り下げるとともに、吊り荷を巻き上げ下げするワイヤロープ2に相対移動可能かつワイヤロープの振れ角に追従可能に検出器本体17を設ける。これにより、吊り下げ部材16で吊り下げた検出器本体17をワイヤロープ2の振れに追従させ、検出器本体17に設けたMEMS慣性センサによりリアルタイムで精度良く振れ角度を検出することで、装置をコンパクトにする。
(もっと読む)
クレーンの高さ検出装置及び検出方法
【課題】簡易な構成で鉛直方向も含めたクレーン位置を正確に測定でき、かつ可動部である台車に高さ検出装置のための電気配線等を敷設する必要のないクレーンの高さ検出装置及び検出方法を提供する。
【解決手段】クレーン本体12に配置されたワイヤ式エンコーダ40は、エンコーダ本体42と、エンコーダ本体42から所定長さ引き出し可能な測定ワイヤ44とを有し、エンコーダ本体42から引き出された測定ワイヤ44は、台車14の移動方向に平行に延び、台車14に設けられた滑車46によって鉛直方向に変向させられ、台車14の下方に懸吊されたクレーンフック18に取り付けられる。
(もっと読む)
クレーンの衝撃緩和装置
【課題】クレーンの物理的衝撃及び自動停止時の衝撃を緩和させることによって、確実に荷振れを防止し、安定した荷役作業を可能にする。
【解決手段】このクレーンの衝撃緩和装置は、クレーンのブーム伸縮長さ、ブーム起伏角度、ウインチのワイヤロープ繰り出し量およびブーム旋回角度の各動作の位置情報を検出する位置情報検出器と、その位置情報検出器からクレーンの各動作の位置情報を取得するコントローラとを備えている。そして、このコントローラは、位置情報検出器から取得したクレーンの各動作の位置情報に基づいて、クレーンの物理的衝撃及び自動停止時の衝撃を緩和させるようにクレーン速度を制御する衝撃緩和処理(ステップS10、S50、S80、S100)を実行する。
(もっと読む)
スタッカクレーンの制振方法
【課題】製造コストの上昇を招くことなく、発生する昇降台の自由振動の振幅を小さくして、作業効率を向上させるスタッカクレーンの制振方法を提供する。
【解決手段】増速領域、等速領域、及び減速領域を備えた速度パターンで走行レール11上を往復走行可能な走行台車12と、これに立設された昇降マスト13と、搬送物13aを搭載し昇降マスト13に沿って昇降する昇降台14を有するスタッカクレーン10の制振方法であって、昇降台14及び搬送物13aの重量と昇降台14の高さ位置に基づいて、スタッカクレーン10の固有振動周期を予め求め、この2倍以上の整数倍の時間に増速領域及び減速領域の時間を設定し、増速領域及び減速領域の各加速度パターンを、左右対称の増加及び減少加速度と負の増加及び負の減少加速度として、搬送物13aを搭載した昇降台14の増速領域及び減速領域の終了後に発生する自由振動の振幅を小さくする。
(もっと読む)
クレーンの荷振れ止め装置
【課題】吊荷を目標停止位置に位置させたときに吊荷の振れがある場合に目標停止位置付近で制振させるクレーンの荷振れ止め装置を提供する。
【解決手段】クレーンの荷振れ止め装置は、停止判断部で各操作手段の停止を判断した時にブーム起伏角検出手段およびブーム長さ検出手段の各検出手段からの検出信号を受けその時に位置するブーム先端部位置を吊荷目標位置として目標位置設定部で設定し、前記停止判断部からの停止信号と前記各検出手段からの検出信号と前記ロープ長さ検出手段からのロープ長さ信号と前記縦方向振角検出手段からの振れ角信号とを受け、吊荷の前後方向吊荷の振れに対して吊荷の振れ位置にブーム先端部を位置させるよう前後方向に水平移動して制振させるとともに、前記目標位置設定部で設定した吊荷目標位置にブーム先端部を位置させるよう各駆動手段に制御信号を出力する制振制御部を備えた。
(もっと読む)
クレーン装置
【課題】 任意の方向に搬送物を搬送できるようにし、しかも、索体の振れの検知に応じて任意の方向に搬送できるようにするとともに、索体の振れに対するモータの駆動の応答性を良好にし、応答性の補償を確実に得る。
【解決手段】 第1モータ12により第1レールを走行する一対の第1走行体と、第2モータ22により一対の第1走行体に懸架される第2レールを走行する第2走行体と、第2走行体に吊下され搬送物を懸吊する索体30と、索体30の振れを検知する検知部40と、第1及び第2モータ12,22を駆動制御する駆動制御手段60とを備え、検知部40を、索体30の周囲に配設され索体30が近接したことを検知する3以上の近接検知センサ41a〜41dを備えて構成し、駆動制御手段60を、各近接検知センサ41a〜41dの検知の有無に基づいて第1及び第2モータ12,22の回転方向を判断させて各モータ12,22を駆動させるようにした。
(もっと読む)
ブーム式クレーンに用いられる荷物の地切装置
【課題】荷物12を揺動しないように吊り上げるブーム式クレーンの地切装置を提供する。
【解決手段】コントローラ11に、地切指令手段14、負荷検出手段13、ワイヤーロープ繰り出し長さ検出手段15、および、ウインチ4の巻き取り駆動量検出手段16からの各検出信号を入力し、コントローラ11で、下記手順を実行する。
第一手順;地切指令手段14からの地切指令信号で、ウインチ制御弁10aに巻上げ指
令信号を出力。この出力は、負荷検出手段13からの信号でワイヤーロープ5に所定
張力が生じたことが検出されるまで行う。
第二手順;第一手順の完了後、起伏制御弁8aに起仰指示信号を出力すると共にウイン
チ制御弁10aに巻上げ指令信号を出力。巻上げ指令信号は、第二手順で行われるブーム3の起仰作動によりフック吊下距離が増加することがないようウインチを巻き取り駆動するものであり、前記フック吊下距離算出手段の算出値に基づき生成。
(もっと読む)
クレーン及びそのコントローラ
フィルタ部を有するコントローラをフィードフォワード制御プログラムによって作動させることによって、クレ−ンのロープにより吊り下げられた荷を第1位置から第2位置まで搬送した時点で発生する荷の振れを抑制するようにクレーン駆動装置を制御する方法と装置を提供する。方法は、ロープの振れの回転中心から荷の重心までの距離であるロープ長から逐次演算される共振周波数と、クレーン駆動装置の性能を超えないように予め別途演算された前記クレーン駆動装置の制御装置に関するパラメータとの下に、前記荷の搬送指令における搬送速度、搬送加速度および搬送加々速度の少なくとも1つのものにおける最大値を制限した搬送指令から共振周波数付近の成分をフィルタ部によって除去し、共振周波数付近の成分が除去された搬送指令をクレーン駆動装置に入力して荷を第1位置から第2位置まで搬送した時点で大きく振れないようにクレーン駆動装置を制御する。 (もっと読む)
1 - 9 / 9
[ Back to top ]