
Fターム[3F204EB04]の内容
クレーンの細部(制御、安全) (2,955) | 振れ角検出器 (63) | 検出器の種類 (30) | 非接触式 (24) | 光学的 (13)
Fターム[3F204EB04]に分類される特許
1 - 13 / 13
クレーン振れセンサ及びクレーン
【課題】簡素な構成で正確に振れを検出することができるクレーン振れセンサを提供する。
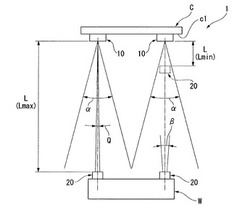
【解決手段】クレーン本体Cに設けられ、クレーン本体Cの下方に向けられた撮像部10と、クレーン本体Cに吊り下げられて撮像部10と対向する吊り具Cに設けられ、アレイ状に配列された複数のLEDチップにより発光面が形成され、上方へ向けて照射光を発するLEDアレイ素子を有するターゲット部20とを備え、ターゲット部20の発光面の重心から縁までの最短距離をd、撮像部10とターゲット部20との間の最大ストロークをLMAX、撮像部10の撮像素子の瞬時視野角をQとした場合に、以下の関係を満たすことを特徴とする。
Q×LMAX<d
(もっと読む)
振れ検出装置、振れ検出方法、及びクレーン

【課題】簡易な構成で吊荷の振れ変位量を正確に検出することができる振れ検出装置、振れ検出方法、及びクレーンを得ることを目的とする。
【解決手段】トロリに設けられたセンサによりコンテナを把持するスプレッダに設けられたレーザ光源の位置を検知することで吊荷の振れ変位量が検出される。そして、オフセット誤差導出部64が、吊荷の振れ角度、トロリの速度の微分値、及び振れ変位量の2階微分値に基づいてオフセット誤差を導出し、減算部66が、オフセット誤差を検出した振れ変位量から減算することで、オフセット誤差を検出した振れ変位量から除去する。
(もっと読む)
クレーンの振れ止め制御方法
【課題】 設定されたパラメータの影響を受けずに高精度の制御が可能なクレーンの振れ止め制御方法を実現する。
【解決手段】 クレーンのトロリーによる吊り荷搬送の加速工程では、あらかじめ設定された吊り荷の固有周期に基づいて同調制御を行うとともに、吊り荷の振れ周期を計測し、等速度搬送工程では、吊り荷の振れ振幅を計測し、振れ振幅に基づいて搬送方向と同じ方向に作用する正方向制御加速度と搬送方向と逆方向に作用する逆方向制御加速度とを設定し、振れ振幅が最大またはゼロとなるときから、正方向制御加速度及び逆方向制御加速度を、振れ周期に基づいてそれぞれ設定される所定の時間で、トロリーにそれぞれ作用させる振れ制御を行い、減速工程では振れ周期に基づいて最短時間制御を行う。
(もっと読む)
スタッカクレーンの制振方法
【課題】製造コストの上昇を招くことなく、発生する昇降台の自由振動の振幅を小さくして、作業効率を向上させるスタッカクレーンの制振方法を提供する。
【解決手段】増速領域、等速領域、及び減速領域を備えた速度パターンで走行レール11上を往復走行可能な走行台車12と、これに立設された昇降マスト13と、搬送物13aを搭載し昇降マスト13に沿って昇降する昇降台14を有するスタッカクレーン10の制振方法であって、昇降台14及び搬送物13aの重量と昇降台14の高さ位置に基づいて、スタッカクレーン10の固有振動周期を予め求め、この2倍以上の整数倍の時間に増速領域及び減速領域の時間を設定し、増速領域及び減速領域の各加速度パターンを、左右対称の増加及び減少加速度と負の増加及び負の減少加速度として、搬送物13aを搭載した昇降台14の増速領域及び減速領域の終了後に発生する自由振動の振幅を小さくする。
(もっと読む)
トロリの空転防止制御装置
【課題】吊荷の振れによって車輪間に輪圧差が生じた場合でも、輪圧の低くなる車輪の空転を確実に防止することができるトロリの空転防止制御装置を提供すること。
【解決手段】車輪によってガーダ上を走行するトロリの空転防止制御装置23であって、前記車輪を駆動するトロリモータ21の駆動トルクが、吊荷に基づく前記車輪の輪圧に応じて決定され、決定された指令が、前記トロリモータ21を制御するトロリモータ制御器22に出力される。
(もっと読む)
コンテナのスキュー振れ止め装置
【課題】コンテナが上方に吊り上げられてスプレッダとトロリーが近接した場合でも、コンテナのスキュー振れを止めることができるコンテナのスキュー振れ止め装置を提供する。
【解決手段】スプレッダ7の中心からの距離が互いに等しくなるようにスプレッダの長手方向の中心軸に沿って2個の標識灯9a、9bと、その中心軸に沿って2個の標識灯9a、9bの外側に少なくとも1個の標識灯9cとを配置して、スプレッダ7とトロリー2との間の距離Hに応じて解析制御装置11が標識灯9a、9b、9cのうちからスキュー振れ止めの標的を構成する標識灯を選択する。
(もっと読む)
レーザーポインタを用いた天井クレーンによる搬送方法及び天井クレーンシステム
【課題】レーザーポインタにより指示された3次元空間における目標搬送位置へ搬送物を搬送する方法及び天井クレーンを提供する。
【解決手段】コントローラを介して自動運転される天井クレーンを用いて搬送物を搬送開始位置から目標搬送位置の真上までの3次元空間における搬送径路に沿って自動的に搬送する方法であって:スポット光を撮像するための複数のカメラを設置し;レーザーポインタによりレーザー光線を目標搬送位置床表面に照射してスポット光を生成し;該生成されたスポット光を少なくとも1台のカメラで撮像し、該撮像データを利用してスポット光重心位置の3次元空間座標を決定し;前記3次元空間座標を前記目標搬送位置データとして利用して前記コントローラによって前記搬送径路を決定し、該搬送径路に沿って前記搬送物を前記搬送開始位置から前記目標搬送位置の真上まで自動的に搬送する;ことを含む自動搬送方法。
(もっと読む)
クレーンの荷振れ止め装置
【課題】吊荷を目標停止位置に位置させたときに吊荷の振れがある場合に目標停止位置付近で制振させるクレーンの荷振れ止め装置を提供する。
【解決手段】クレーンの荷振れ止め装置は、停止判断部で各操作手段の停止を判断した時にブーム起伏角検出手段およびブーム長さ検出手段の各検出手段からの検出信号を受けその時に位置するブーム先端部位置を吊荷目標位置として目標位置設定部で設定し、前記停止判断部からの停止信号と前記各検出手段からの検出信号と前記ロープ長さ検出手段からのロープ長さ信号と前記縦方向振角検出手段からの振れ角信号とを受け、吊荷の前後方向吊荷の振れに対して吊荷の振れ位置にブーム先端部を位置させるよう前後方向に水平移動して制振させるとともに、前記目標位置設定部で設定した吊荷目標位置にブーム先端部を位置させるよう各駆動手段に制御信号を出力する制振制御部を備えた。
(もっと読む)
共吊クレーンの協調搬送制御装置及び共吊クレーンの協調搬送制御方法
【課題】複数のクレーンの動作を制御し複数のクレーンにより単一の搬送物を吊り下げて搬送する共吊クレーンの協調搬送制御装置において、作業者のミス等により搬送が失敗する虞れなく、動作指令の生成を容易とし操作の効率を向上させ、搬送物の揺れを抑えるとともに、並進運動のみならず回転運動をも行なうクレーンを用いる場合にも適用できるようにする。
【解決手段】複数のクレーン1,2のうちの一は、作業者の操作によって動作するリーダクレーン1であり、他のクレーンは、制御装置により制御されて動作するフォロワクレーン2である。制御装置は、フォロワクレーン2における搬送物3の振れ幅に基づいてフォロワクレーン2のリーダクレーン1に対する距離偏差を推定し、推定された距離偏差をなくすようにフォロワクレーン2ヘの動作指令を生成する。この動作指令によりフォロワクレーン2を動作させてリーダクレーン1の動作に追従させる。
(もっと読む)
協調搬送方法および協調搬送装置
【課題】搬送重量あたりの機器コストを低減でき、重量物の搬送に有利な協調搬送方法および協調搬送装置を提供する。
【解決手段】
複数台の移動式クレーンロボット10A(リーダ11およびフォロワ12)により搬送物体1を共吊りしながら目的地まで搬送する。搬送物体1とフォロワ12のワイヤ6との接続点にマーカ13を設置し、マーカ13を上方から撮像する撮像装置8をフォロワ12に設置する。リーダ11に目的地までの動作指令を与え、撮像装置8の画像からフォロワ12の座標系におけるマーカ13の位置を検知して位置情報を生成し、この位置情報に基づいてリーダ11の動作を推定し、推定したリーダ11の動作に基づいてフォロワ12の動作を制御する。
(もっと読む)
振れ角検出装置、振れ角検出プログラム、記録媒体及び二次元ワイヤ懸垂装置
【課題】ワイヤのX方向及びY方向の振れ角を正確に迅速に求めることができる検出装置を提供する。
【解決手段】ワイヤ懸垂機構のワイヤをX方向のCCDカメラ1、8により撮像され抽出されたワイヤ画像の領域と画面全体の上下の画素領域との交差領域を抽出し、この交差領域の上下2つの重心座標に対してレンズによる歪を補正する。この上下2つの重心座標を補正後、CCDカメラ1、8より得られた値を用いて各々上下2つの重心座標を三次元世界座標系に変換し、2台のカメラから得られた計4つの重心位置及び2台のカメラレンズ中心位置より、三次元世界座標系におけるワイヤの方向を算出し、このワイヤ方向よりワイヤ傾き角のx方向、y方向成分を角度検出部7、13により算出する。そして各部の処理を制御する制御部14から構成される。
(もっと読む)
コンテナクレーンの対象物位置計測装置と該対象物位置計測装置を用いた自動荷役装置
【課題】スプレッダと吊り上げ目標コンテナ、吊り荷コンテナと積載目標物の位置を同時計測し、積み込み積み卸し時の位置決めを正確に行えるようにする。
【解決手段】トロリー8に巻上げロープ10を介して懸吊されたスプレッダ9にて保持されるコンテナ11の長手方向一端よりも外方位置となるように、トロリー8の横行方向と直角方向の一側に、レーザレーダ19を取付部材32を介して取り付ける。トロリー8に懸吊されたスプレッダ9、スプレッダ9に保持した吊り荷コンテナ11と、その下方に位置する、吊り上げ目標コンテナ11、又は、吊り荷コンテナ11の積載目標物を、レーザレーダ19により斜め上方より走査して3次元位置を同時計測し、その3次元位置情報を基に、スプレッダ9下面と吊り上げ目標コンテナ11の上面、又は、吊り荷コンテナ11下面と積載目標物の上面が一致するよう上記巻上げロープ10の長さとトロリー8の横行を制御させる。
(もっと読む)
揺れ制御のためのシステム及び方法
積み荷搬送システム(200、600)における揺れの測定及び制御のためのシステム、方法及びコンピュータプログラムコードが提供され、これらのシステム、方法及びコンピュータプログラムコードはクレーンからつり下げられた積み荷のようなつり下げられた積み荷(108)の揺れを測定及び制御するためにマイクロ・エレクトロ・メカニカルシステム(MEMS)デバイス(202、204、302、304、602)を使用することを含む。  (もっと読む)
(もっと読む)
1 - 13 / 13
[ Back to top ]