
Fターム[3G093BA23]の内容
車両用機関又は特定用途機関の制御 (95,902) | 目的 (12,965) | 定速走行、オートドライブ (506)
Fターム[3G093BA23]に分類される特許
501 - 506 / 506
自動車の間隔制御システム
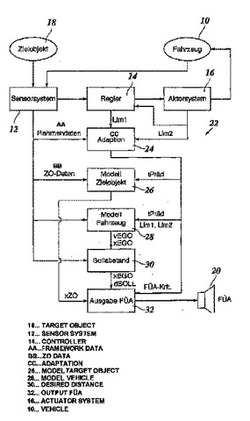
目標対象(18)および自己の車両(10)に関するデータを検出するためのセンサシステム(12)と,車両(10)の縦運動を制御するためのアクターシステム(16)と,目標対象(18)との間隔に関して定められた制御目標を維持するために,所定の介入限界(Lim1,Lim2)内においてアクターシステム(16)へ介入する制御器(14)と,制御目標が維持されない場合に,運転者に引受け要請を出力するための出力装置(20)とを有する,自動車のための間隔制御システムは,制御目標が維持されない対立状況を予測し,対立状況が発生する前に引受け要請(FUA)を作動させるための予測システム(22)を備えることを特徴としている。 (もっと読む)
車間距離制御を行う方法及び装置
本発明は、車間距離制御を行う方法及び装置に関し、これによれば、前記車両と前方走行車両との間の距離を表す距離変数の実際値(dact)が測定される。さらに、距離変数のための複数の重み付け値(gi)が、車両の運転状況及び/又は車両の周囲状況及び/又は運転者の運転動作を表す入力変数(xi)に従って決定され、前記重み付け値(gi)が、第1の計算ステップで論理的に結合されて、距離変数のための論理結合値(f)を形成する。距離変数のための設定値(dsetp)が論理結合値(f)から決定され、車両の制動手段及び/又は駆動手段が、距離変数の測定実際値(dact)が決定設定値(dsetp)をとるよう起動される。第1の計算ステップの後に第2の計算ステップが続き、ここで、論理結合値(f)が、予め定義された値の範囲に限定され、距離変数の設定値(dsetp)が、適宜限定される論理結合値(f)から決定される。 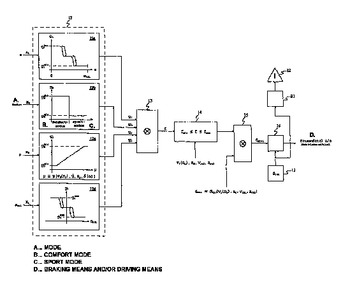 (もっと読む)
(もっと読む)
車間距離制御装置

【課題】先行車に対する車間距離制御を行う車間距離制御装置において、先行車の発進に追従して発進した際に不必要な自動減速が行われるのを防止してスムーズな発進を可能にする。
【解決手段】所定時間判定手段M9が、セットスイッチ17あるいはリジュームスイッチ18が操作されて自車が車間距離制御を開始してから所定時間内にあると判定し、かつ接近状態判定手段M8が、先行車との車間距離が車頭時間および自車の車速に基づいて設定した目標車間距離未満であると判定すると、目標車間距離設定手段M4が前記目標車間距離を車間距離検出手段M2で検出した実際の車間距離に変更するので、自車が先行車に続いて発進して車間距離制御を開始した直後に、目標車間距離と実際の車間距離との差が大きいために自動減速が行われるのを防止し、発進後のスムーズな加速を可能にしてドライバーの違和感を解消することができる。
(もっと読む)
車輌の走行制御方法及び走行制御装置
【課題】自動定速走行中は、加速制御に優先して、減速制御を速やかに行なう車輌の走行制御方法及び走行制御装置を提供する。
【解決手段】アクセル開度とエンジン回転数とから基本トルクを算出する基準トルク算出手段102と、走行車速と目標車速とから目標エンジントルクを計算する第一目標エンジントルク算出手段104と、走行車速と目標車速とから減速時目標エンジントルクを計算する第二目標エンジントルク算出手段106と、状態遷移判定手段110で判定した制御モードに基づき、基本トルクと目標エンジントルクとの内どちらかを要求トルクとして出力するトルク選択手段107と、減速指示手段108から減速指示があったときに、要求トルクと減速時目標エンジントルクとを比較し、減速時目標エンジントルクを最終トルクとして出力する最終トルク選択手段109とを備える。
(もっと読む)
車間距離制御装置
【課題】 車間時間または車間距離をステップ状に切り換えた時の車速変化を緩やかにする。
【解決手段】 車間時間がステップ状に切り換えられた時に、車間時間を所定の変化速度で変化させて目標車間時間T*を生成し、目標車間時間T*と車速検出値とに応じた目標車間距離を設定し、車間距離検出値が目標車間距離に一致するように車両の駆動力と制動力を制御する。これにより、車間時間をステップ状に切り換えた時の車速変化が緩やかになり、乗り心地をよくすることができる。
(もっと読む)
自動車の走行制御装置
【課題】自車が先行車に追従して第1目標車速付近で走行するときに車体の前後方向の加減速を頻繁に受けず、乗り心地を向上できる。
【解決手段】定速走行用車速設定部27により設定される自車の第1目標車速と車間距離用車速設定部28により設定される自車の第2目標車速とを比較して低い方の車速が自車の最終目標車速とするように制御される。第1目標車速V1から減速して所定の目標車間距離になるように自車の最終目標車速を第2目標車速に切換えるときに、V1からV1−αまでの範囲では、現時の自車の最終目標車速を切換えないように制御される。また第2目標車速から加速して上記第1目標車速になるように自車の最終目標車速を切換えるときに、V1からV1+αまでの範囲では、現時の自車の最終目標車速を切換えないように制御される。
(もっと読む)
501 - 506 / 506
[ Back to top ]