
自動車の走行制御装置

【課題】自車が先行車に追従して第1目標車速付近で走行するときに車体の前後方向の加減速を頻繁に受けず、乗り心地を向上できる。
【解決手段】定速走行用車速設定部27により設定される自車の第1目標車速と車間距離用車速設定部28により設定される自車の第2目標車速とを比較して低い方の車速が自車の最終目標車速とするように制御される。第1目標車速V1から減速して所定の目標車間距離になるように自車の最終目標車速を第2目標車速に切換えるときに、V1からV1−αまでの範囲では、現時の自車の最終目標車速を切換えないように制御される。また第2目標車速から加速して上記第1目標車速になるように自車の最終目標車速を切換えるときに、V1からV1+αまでの範囲では、現時の自車の最終目標車速を切換えないように制御される。
【解決手段】定速走行用車速設定部27により設定される自車の第1目標車速と車間距離用車速設定部28により設定される自車の第2目標車速とを比較して低い方の車速が自車の最終目標車速とするように制御される。第1目標車速V1から減速して所定の目標車間距離になるように自車の最終目標車速を第2目標車速に切換えるときに、V1からV1−αまでの範囲では、現時の自車の最終目標車速を切換えないように制御される。また第2目標車速から加速して上記第1目標車速になるように自車の最終目標車速を切換えるときに、V1からV1+αまでの範囲では、現時の自車の最終目標車速を切換えないように制御される。
【発明の詳細な説明】
【0001】
【発明の属する技術分野】本発明は、定速走行するための自車の第1目標車速を設定する定速走行用設定部と、自車と先行車との車間距離が所定の車間距離になるように自車の第2目標車速を設定する車間距離用車速設定部とを備えた自動車の走行制御装置に関する。更に詳しくは第1目標車速から減速して第2目標車速に、また第2目標車速から加速して第1目標車速にそれぞれ最終目標車速を切換えるときの制御に係る自動車の走行制御装置に関するものである。
【0002】
【従来の技術】この種の自動車の走行制御装置として、自車を一定の車速で走行するように制御する定速走行制御機能と、先行車との車間距離が所定の車間距離になるように自車の車速を制御する車間距離制御機能とを備えた走行制御装置が知られている(例えば、特開平1−114550)。一般に、こうした走行制御装置では定速走行制御中に遅い先行車を検知すると車間距離制御に移行し、反対に車間距離制御中に先行車が加速して自車及び先行車の車速が定速走行制御で予め設定した目標車速を越えたときには、それ以上先行車を追従せずに、上記目標車速での定速走行に移行するようになっている。
【0003】しかし、上記走行装置では定速走行制御から車間距離制御に切換えるとき、また車間距離制御から定速走行制御に切換えるときに問題を生じる。即ち、先行車の加速が非常に緩やかな場合、また先行車が長い時間で見ると加速状態にあるが、ごく短時間で見ると加減速を繰返している場合には、自車が定速走行制御の目標車速を少し越えたり、或いは少し下回ったりする恐れがある。この場合には車間距離制御と定速走行制御とが繰返し行われ、車体が前後方向に加速度又は減速度を頻繁に受け、自動車の乗り心地が悪くなる。従来、この問題点を解決するために、先行車の車速が定速走行制御の目標車速付近で変動する状況のときに、定速走行制御と車間距離制御との間の切換えを規制するようにした自動車の走行制御装置が提案されている(特開平7−17293)。この走行制御装置では、具体的には、定速走行制御に切換えた後、再度車間距離制御に切換えるときに所定時間この切換えを禁止するか、或いは制御ゲインを小さくすることで制御の切換えを規制している。
【0004】
【発明が解決しようとする課題】しかし、上記従来の特開平7−17293号公報に示される自動車の走行制御装置では、車間距離制御を行っている状態から先行車が加速して離れたために定速走行制御に切換えるときに、この切換えを所定時間禁止すると、自車の目標設定速度より異常に大きくなる恐れがある。また定速走行制御を行っている状態から先行車が減速して接近したために車間距離制御に切換えるときに、この切換えを所定時間禁止すると、先行車に急接近して自車の目標車間距離より異常に小さくなる恐れがある。この結果、乗員に違和感とともに不安感を与える恐れがあった。また、上記従来の自動車の走行制御装置では、制御ゲインを小さくする、例えば変動する状況を判断する手段を緩やかにしたり、或いは車速変化の取込み間隔を長くしたりすると、車間距離制御と定速走行制御との切換わる時点を予測できないため、乗員に不安感を与える恐れがあった。本発明の目的は、乗員に違和感や不安感を与えず、また自車が先行車に追従して第1目標車速付近で走行するときに車体の前後方向の加減速を頻繁に受けず、乗り心地のよい自動車の走行制御装置を提供することにある。
【0005】
【課題を解決するための手段】請求項1に係る発明は、図1及び図2に示すように、一定の車速で走行するための自車の第1目標車速を設定する定速走行用車速設定部27と、車間距離センサ23で検出した自車と先行車との車間距離が所定の車間距離になるように自車の第2目標車速を設定する車間距離用車速設定部28とを備え、かつ定速走行用車速設定部27により設定される自車の第1目標車速と車間距離用車速設定部28により設定される自車の第2目標車速とを比較して低い方の車速を自車の最終目標車速とするように制御する自動車の走行制御装置の改良である。その特徴ある構成は、定速走行するための自車の第1目標車速をV1とし、この第1目標車速から減速して所定の目標車間距離になるように自車の最終目標車速を第2目標車速に切換えるときにV1からV1−αまでの範囲、及び所定の目標車間距離で走行した第2目標車速から加速して上記第1目標車速になるように自車の最終目標車速を切換えるときにV1からV1+αまでの範囲では、それぞれ現時の自車の最終目標車速を切換えないように制御したところにある。
【0006】この請求項1に記載された自動車の走行制御装置では、先ず自車を一定速度で走行させた状態で走行制御装置を作動させると、定速走行用車速設定部27が第1目標車速V1を設定し、車間距離用車速設定部28が上記V1に対応する目標車間距離を算出する。次いで車間距離センサ23が自車と先行車との車間距離が目標車間距離を越えていることを検出すると、自車を定速走行制御する。次に先行車が減速して車間距離が目標車間距離になると、車間距離用車速設定部28が車間距離を目標車間距離に維持するための第2目標車速を算出し、この第2目標車速がV1−α未満である場合には車間距離を目標車間距離に保つように車間距離制御する。また先行車両が加速して自車の車速がV1+αを越えた場合には、車速をV1に保つように定速走行制御し、先行車がV1±αの範囲内に減速した後、再び加速してV1+αを越えた場合には、定速走行制御をし続ける。なお、第1目標車速をV1km/hrとするとき、αは0.5km/hr〜5km/hrの間の一定値であることが好ましい。
【0007】
【発明の実施の形態】次に本発明の実施の形態を図面に基づいて説明する。図1に示すように、この実施の形態ではエンジン11は車両(以下、自車という)に搭載されたディーゼルエンジンであり、このエンジン11には燃料噴射ポンプ12により燃料が噴射されるように構成される。燃料噴射ポンプ12は電子式ガバナ12aを有し、このガバナ12aにてコントロールラック12bを駆動することにより、エンジン11への燃料噴射量を制御可能に構成される。またエンジン11にて発生した排ガスを排出する排気管13にはこの排気管13を開閉するエキゾーストブレーキ14が設けられ、変速機16からデフ装置17に動力を伝達するプロペラシャフト18には渦電流式リターダ19が設けられる。
【0008】エキゾーストブレーキ14はエキゾースバルブ14aにより構成され、このバルブ14aにより排気管13を閉じて排ガスの流れを阻止し、エンジン11の内部抵抗を増大させることにより、自車を減速させるように構成される。また渦電流式リターダ19は強力磁石及び金属板を用いてプロペラシャフト18の回転エネルギを電気的に熱エネルギに変え、この熱エネルギを大気中に放散させることにより、自車を減速させるように構成される。なお、上記エキゾーストブレーキ及び渦電流式リターダを用いずに、或いはエキゾーストブレーキ及び渦電流式リターダとともに、流体の粘性抵抗を利用した流体式リターダやエンジンの排気バルブの開放タイミングを利用したエンジンリターダを用いてもよい。
【0009】一方、燃料噴射ポンプ12にはコントロールラック12bの位置を検出するラック位置センサ21が設けられ、変速機16には自車の速度を検出する車速センサ22が設けられる。また自車には自車と先行車との車間距離L0を検出する車間距離センサ23が設けられ、自車の運転席にはクルーズセットスイッチ24が設けられる。車速センサ22は変速機16の出力軸の回転をスピードメータケーブルにより取出し、磁気感応素子(ホールIC)とスピードメータケーブルで駆動されるマグネットで車速に比例したパルス信号を送出するように構成された車速センサである。また車間距離センサ23は自車の前面(フロントバンパ等)に取付けられレーザ光を自車の進行方向に発する発光部と、発光したレーザ光が先行車で反射し戻ってきたレーザ光を受光する受光部とを有する。
【0010】ラック位置センサ21、車速センサ22、車間距離センサ23及びクルーズセットスイッチ24の各検出出力はコントローラ26の制御入力に接続され、コントローラ26の制御出力は電子式ガバナ12a、エキゾーストブレーキ14及び渦電流式リターダ19にそれぞれ接続される。またコントローラ26は一定の車速で走行するための自車の第1目標車速V1を設定する定速走行用車速設定部27と、車間距離センサ23で検出した自車と先行車との車間距離L0が所定の目標車間距離L1になるように自車の第2目標車速V2を設定する車間距離用車速設定部28と、上記第1目標車速V1と第2目標車速V2とを比較する比較回路29とを備える(図1及び図2)。
【0011】クルーズセットスイッチ24をオンすると、本発明の走行制御装置が作動するとともに、このスイッチ24をオンしたときの車速を定速走行用車速設定部27が第1目標車速V1として設定するように構成される。また車間距離用車速設定部28は第1目標車速V1に対応する目標車間距離L1を算出し、車間距離L0が目標車間距離L1以下になった場合には車間距離L0を目標車間距離L1に維持するための第2目標車速V2を算出するように構成される。更に比較回路29により第1目標車速V1と第2目標車速V2とが比較され、低い方の車速を自車の最終目標車速とするように電子式ガバナ12a、エキゾーストブレーキ14及び渦電流式リターダ19が制御される。
【0012】本実施の形態の特徴ある構成は、コントローラ26が第1目標車速V1から減速して所定の目標車間距離L1になるように自車の最終目標車速を第2目標車速V2に切換えるときに、V1からV1−αまでの範囲では、現時の自車の最終目標車速を切換えないように制御(定速走行制御を維持するように制御)し、また所定の目標車間距離L1で走行した第2目標車速V2から加速して上記第1目標車速V1になるように自車の最終目標車速を切換えるときに、V1からV1+αまでの範囲では、現時の自車の最終目標車速を切換えないように制御(車間距離を維持するように制御)するところにある。
【0013】上記αは0.5km/hr〜5km/hrの間の一定値、好ましくは2km/hrである。αを0.5km/hr〜5km/hrの間の一定値に限定したのは、0.5km/hr未満では自車が先行車に追従して第1目標車速V1付近で走行するときに車体の前後方向の加減速を頻繁に受け、乗り心地が悪くなる不具合があり、5km/hrを越えると第1目標車速V1より大幅に増速したり或いは先行車に接近し過ぎたりする不具合があるからである。
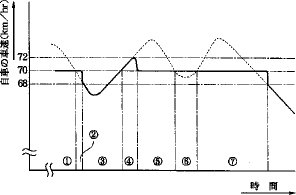
【0014】このように構成された自動車の走行制御装置の動作を図1〜図3に基づいて説明する。図3において、実線は自車の実際の車速、破線は自車の第2目標車速をそれぞれ示す。先ず自車を一定速度、例えば70km/hrで走行させたときに、クルーズセットスイッチ24をオンすると、定速走行用車速設定部27が上記スイッチ24の検出出力に基づいて第1目標車速V1を70km/hrに設定し、車間距離用車速設定部28が上記V1に対応する目標車間距離L1を例えば50mと算出する。次いで車間距離センサ23が自車と先行車との車間距離L0が50mを越えていることを検出すると、コントローラ26はこのセンサ23の検出出力に基づいて自車が70km/hrの一定速度で走行するように電子式ガバナ12a、エキゾーストブレーキ14及び渦電流式リターダ19を制御(定速走行制御)する(図3の■)。次に先行車が減速して車間距離L0が50mになると、車間距離用車速設定部28が車間距離50mを維持するための第2目標車速V2を算出し、V2がV1−α未満(例えばαを2km/hrとすると、V2が68km/hr未満)であることをコントローラ26が算出すると、コントローラ26は車間距離を50mに保つように電子式ガバナ等を制御(車間距離制御)する(図3の■)。但し、V2が70km/hrから68km/hrの間では定速走行制御を行う(図3の■)。
【0015】また先行車が加速して自車の車速V2がV1+αを越えた(例えばαを上記と同様に2km/hrとすると、V2が72km/hrを越えた)ことをコントローラ26が算出すると、コントローラ26は車速を70km/hrに保つように電子式ガバナ12a等を制御(定速走行制御)する(図3の■)。但し、V2が70km/hrから72km/hrの間では車間距離制御を行う(図3の■)。更に先行車が69km/hrまで減速した後、再び加速して72km/hrを越えた場合には、コントローラ26は定速走行制御をし続ける(図3の■及び■)。この結果、自車が先行車に追従して第1目標車速V1(70km/hr)付近で走行するときに車体の前後方向の加減速を頻繁に受けずに済むので、乗り心地を向上できる。なお、上記車速や車間距離等の数値は一例であって、これらの数値に限定されるものではない。
【0016】
【発明の効果】以上述べたように、本発明によれば、定速走行用車速設定部により設定される自車の第1目標車速と車間距離用車速設定部により設定される自車の第2目標車速とを比較して低い方の車速を自車の最終目標車速とするように制御し、第1又は第2目標車速から減速して第2又は第1目標車速に切換えるときにV1からV1±αまでの範囲ではそれぞれ現時の自車の最終目標車速を切換えないように制御したので、自車が先行車に追従して第1目標車速V1付近で走行するときに、先行車がV1±αの範囲内の車速で変動しても、自車を第1目標車速V1で定速走行制御する。この結果、自車の車体の前後方向への加減速を頻繁に受けずに済むので、乗り心地を向上できる。
【0017】また先行車に急接近して自車の目標車間距離より異常に小さくなるため、或いは車間距離制御と定速走行制御との切換わる時点を予測できないため、乗員に違和感とともに不安感を与える従来の自動車の走行制御装置と比較して、本発明の走行制御装置では、先行車に急接近することがなく、かつ車間距離制御と定速走行制御との切換わる時点を予測できるので、乗員に違和感や不安感を与えることはない。更に第1目標車速をV1km/hrとするとき、αを0.5km/hr〜5km/hrの間の一定値とすれば、上記効果を顕著に奏することができる。
【図面の簡単な説明】
【図1】本発明実施形態の自動車の走行制御装置を示す構成図。
【図2】その走行制御装置の動作を示すフローチャート。
【図3】その走行制御装置による車間距離制御及び定速走行制御の切換え時期を示す図。
【符号の説明】
23 車間距離センサ
27 定速走行用車速設定部
28 車間距離用車速設定部
V1 第1目標車速
【0001】
【発明の属する技術分野】本発明は、定速走行するための自車の第1目標車速を設定する定速走行用設定部と、自車と先行車との車間距離が所定の車間距離になるように自車の第2目標車速を設定する車間距離用車速設定部とを備えた自動車の走行制御装置に関する。更に詳しくは第1目標車速から減速して第2目標車速に、また第2目標車速から加速して第1目標車速にそれぞれ最終目標車速を切換えるときの制御に係る自動車の走行制御装置に関するものである。
【0002】
【従来の技術】この種の自動車の走行制御装置として、自車を一定の車速で走行するように制御する定速走行制御機能と、先行車との車間距離が所定の車間距離になるように自車の車速を制御する車間距離制御機能とを備えた走行制御装置が知られている(例えば、特開平1−114550)。一般に、こうした走行制御装置では定速走行制御中に遅い先行車を検知すると車間距離制御に移行し、反対に車間距離制御中に先行車が加速して自車及び先行車の車速が定速走行制御で予め設定した目標車速を越えたときには、それ以上先行車を追従せずに、上記目標車速での定速走行に移行するようになっている。
【0003】しかし、上記走行装置では定速走行制御から車間距離制御に切換えるとき、また車間距離制御から定速走行制御に切換えるときに問題を生じる。即ち、先行車の加速が非常に緩やかな場合、また先行車が長い時間で見ると加速状態にあるが、ごく短時間で見ると加減速を繰返している場合には、自車が定速走行制御の目標車速を少し越えたり、或いは少し下回ったりする恐れがある。この場合には車間距離制御と定速走行制御とが繰返し行われ、車体が前後方向に加速度又は減速度を頻繁に受け、自動車の乗り心地が悪くなる。従来、この問題点を解決するために、先行車の車速が定速走行制御の目標車速付近で変動する状況のときに、定速走行制御と車間距離制御との間の切換えを規制するようにした自動車の走行制御装置が提案されている(特開平7−17293)。この走行制御装置では、具体的には、定速走行制御に切換えた後、再度車間距離制御に切換えるときに所定時間この切換えを禁止するか、或いは制御ゲインを小さくすることで制御の切換えを規制している。
【0004】
【発明が解決しようとする課題】しかし、上記従来の特開平7−17293号公報に示される自動車の走行制御装置では、車間距離制御を行っている状態から先行車が加速して離れたために定速走行制御に切換えるときに、この切換えを所定時間禁止すると、自車の目標設定速度より異常に大きくなる恐れがある。また定速走行制御を行っている状態から先行車が減速して接近したために車間距離制御に切換えるときに、この切換えを所定時間禁止すると、先行車に急接近して自車の目標車間距離より異常に小さくなる恐れがある。この結果、乗員に違和感とともに不安感を与える恐れがあった。また、上記従来の自動車の走行制御装置では、制御ゲインを小さくする、例えば変動する状況を判断する手段を緩やかにしたり、或いは車速変化の取込み間隔を長くしたりすると、車間距離制御と定速走行制御との切換わる時点を予測できないため、乗員に不安感を与える恐れがあった。本発明の目的は、乗員に違和感や不安感を与えず、また自車が先行車に追従して第1目標車速付近で走行するときに車体の前後方向の加減速を頻繁に受けず、乗り心地のよい自動車の走行制御装置を提供することにある。
【0005】
【課題を解決するための手段】請求項1に係る発明は、図1及び図2に示すように、一定の車速で走行するための自車の第1目標車速を設定する定速走行用車速設定部27と、車間距離センサ23で検出した自車と先行車との車間距離が所定の車間距離になるように自車の第2目標車速を設定する車間距離用車速設定部28とを備え、かつ定速走行用車速設定部27により設定される自車の第1目標車速と車間距離用車速設定部28により設定される自車の第2目標車速とを比較して低い方の車速を自車の最終目標車速とするように制御する自動車の走行制御装置の改良である。その特徴ある構成は、定速走行するための自車の第1目標車速をV1とし、この第1目標車速から減速して所定の目標車間距離になるように自車の最終目標車速を第2目標車速に切換えるときにV1からV1−αまでの範囲、及び所定の目標車間距離で走行した第2目標車速から加速して上記第1目標車速になるように自車の最終目標車速を切換えるときにV1からV1+αまでの範囲では、それぞれ現時の自車の最終目標車速を切換えないように制御したところにある。
【0006】この請求項1に記載された自動車の走行制御装置では、先ず自車を一定速度で走行させた状態で走行制御装置を作動させると、定速走行用車速設定部27が第1目標車速V1を設定し、車間距離用車速設定部28が上記V1に対応する目標車間距離を算出する。次いで車間距離センサ23が自車と先行車との車間距離が目標車間距離を越えていることを検出すると、自車を定速走行制御する。次に先行車が減速して車間距離が目標車間距離になると、車間距離用車速設定部28が車間距離を目標車間距離に維持するための第2目標車速を算出し、この第2目標車速がV1−α未満である場合には車間距離を目標車間距離に保つように車間距離制御する。また先行車両が加速して自車の車速がV1+αを越えた場合には、車速をV1に保つように定速走行制御し、先行車がV1±αの範囲内に減速した後、再び加速してV1+αを越えた場合には、定速走行制御をし続ける。なお、第1目標車速をV1km/hrとするとき、αは0.5km/hr〜5km/hrの間の一定値であることが好ましい。
【0007】
【発明の実施の形態】次に本発明の実施の形態を図面に基づいて説明する。図1に示すように、この実施の形態ではエンジン11は車両(以下、自車という)に搭載されたディーゼルエンジンであり、このエンジン11には燃料噴射ポンプ12により燃料が噴射されるように構成される。燃料噴射ポンプ12は電子式ガバナ12aを有し、このガバナ12aにてコントロールラック12bを駆動することにより、エンジン11への燃料噴射量を制御可能に構成される。またエンジン11にて発生した排ガスを排出する排気管13にはこの排気管13を開閉するエキゾーストブレーキ14が設けられ、変速機16からデフ装置17に動力を伝達するプロペラシャフト18には渦電流式リターダ19が設けられる。
【0008】エキゾーストブレーキ14はエキゾースバルブ14aにより構成され、このバルブ14aにより排気管13を閉じて排ガスの流れを阻止し、エンジン11の内部抵抗を増大させることにより、自車を減速させるように構成される。また渦電流式リターダ19は強力磁石及び金属板を用いてプロペラシャフト18の回転エネルギを電気的に熱エネルギに変え、この熱エネルギを大気中に放散させることにより、自車を減速させるように構成される。なお、上記エキゾーストブレーキ及び渦電流式リターダを用いずに、或いはエキゾーストブレーキ及び渦電流式リターダとともに、流体の粘性抵抗を利用した流体式リターダやエンジンの排気バルブの開放タイミングを利用したエンジンリターダを用いてもよい。
【0009】一方、燃料噴射ポンプ12にはコントロールラック12bの位置を検出するラック位置センサ21が設けられ、変速機16には自車の速度を検出する車速センサ22が設けられる。また自車には自車と先行車との車間距離L0を検出する車間距離センサ23が設けられ、自車の運転席にはクルーズセットスイッチ24が設けられる。車速センサ22は変速機16の出力軸の回転をスピードメータケーブルにより取出し、磁気感応素子(ホールIC)とスピードメータケーブルで駆動されるマグネットで車速に比例したパルス信号を送出するように構成された車速センサである。また車間距離センサ23は自車の前面(フロントバンパ等)に取付けられレーザ光を自車の進行方向に発する発光部と、発光したレーザ光が先行車で反射し戻ってきたレーザ光を受光する受光部とを有する。
【0010】ラック位置センサ21、車速センサ22、車間距離センサ23及びクルーズセットスイッチ24の各検出出力はコントローラ26の制御入力に接続され、コントローラ26の制御出力は電子式ガバナ12a、エキゾーストブレーキ14及び渦電流式リターダ19にそれぞれ接続される。またコントローラ26は一定の車速で走行するための自車の第1目標車速V1を設定する定速走行用車速設定部27と、車間距離センサ23で検出した自車と先行車との車間距離L0が所定の目標車間距離L1になるように自車の第2目標車速V2を設定する車間距離用車速設定部28と、上記第1目標車速V1と第2目標車速V2とを比較する比較回路29とを備える(図1及び図2)。
【0011】クルーズセットスイッチ24をオンすると、本発明の走行制御装置が作動するとともに、このスイッチ24をオンしたときの車速を定速走行用車速設定部27が第1目標車速V1として設定するように構成される。また車間距離用車速設定部28は第1目標車速V1に対応する目標車間距離L1を算出し、車間距離L0が目標車間距離L1以下になった場合には車間距離L0を目標車間距離L1に維持するための第2目標車速V2を算出するように構成される。更に比較回路29により第1目標車速V1と第2目標車速V2とが比較され、低い方の車速を自車の最終目標車速とするように電子式ガバナ12a、エキゾーストブレーキ14及び渦電流式リターダ19が制御される。
【0012】本実施の形態の特徴ある構成は、コントローラ26が第1目標車速V1から減速して所定の目標車間距離L1になるように自車の最終目標車速を第2目標車速V2に切換えるときに、V1からV1−αまでの範囲では、現時の自車の最終目標車速を切換えないように制御(定速走行制御を維持するように制御)し、また所定の目標車間距離L1で走行した第2目標車速V2から加速して上記第1目標車速V1になるように自車の最終目標車速を切換えるときに、V1からV1+αまでの範囲では、現時の自車の最終目標車速を切換えないように制御(車間距離を維持するように制御)するところにある。
【0013】上記αは0.5km/hr〜5km/hrの間の一定値、好ましくは2km/hrである。αを0.5km/hr〜5km/hrの間の一定値に限定したのは、0.5km/hr未満では自車が先行車に追従して第1目標車速V1付近で走行するときに車体の前後方向の加減速を頻繁に受け、乗り心地が悪くなる不具合があり、5km/hrを越えると第1目標車速V1より大幅に増速したり或いは先行車に接近し過ぎたりする不具合があるからである。
【0014】このように構成された自動車の走行制御装置の動作を図1〜図3に基づいて説明する。図3において、実線は自車の実際の車速、破線は自車の第2目標車速をそれぞれ示す。先ず自車を一定速度、例えば70km/hrで走行させたときに、クルーズセットスイッチ24をオンすると、定速走行用車速設定部27が上記スイッチ24の検出出力に基づいて第1目標車速V1を70km/hrに設定し、車間距離用車速設定部28が上記V1に対応する目標車間距離L1を例えば50mと算出する。次いで車間距離センサ23が自車と先行車との車間距離L0が50mを越えていることを検出すると、コントローラ26はこのセンサ23の検出出力に基づいて自車が70km/hrの一定速度で走行するように電子式ガバナ12a、エキゾーストブレーキ14及び渦電流式リターダ19を制御(定速走行制御)する(図3の
【0015】また先行車が加速して自車の車速V2がV1+αを越えた(例えばαを上記と同様に2km/hrとすると、V2が72km/hrを越えた)ことをコントローラ26が算出すると、コントローラ26は車速を70km/hrに保つように電子式ガバナ12a等を制御(定速走行制御)する(図3の
【0016】
【発明の効果】以上述べたように、本発明によれば、定速走行用車速設定部により設定される自車の第1目標車速と車間距離用車速設定部により設定される自車の第2目標車速とを比較して低い方の車速を自車の最終目標車速とするように制御し、第1又は第2目標車速から減速して第2又は第1目標車速に切換えるときにV1からV1±αまでの範囲ではそれぞれ現時の自車の最終目標車速を切換えないように制御したので、自車が先行車に追従して第1目標車速V1付近で走行するときに、先行車がV1±αの範囲内の車速で変動しても、自車を第1目標車速V1で定速走行制御する。この結果、自車の車体の前後方向への加減速を頻繁に受けずに済むので、乗り心地を向上できる。
【0017】また先行車に急接近して自車の目標車間距離より異常に小さくなるため、或いは車間距離制御と定速走行制御との切換わる時点を予測できないため、乗員に違和感とともに不安感を与える従来の自動車の走行制御装置と比較して、本発明の走行制御装置では、先行車に急接近することがなく、かつ車間距離制御と定速走行制御との切換わる時点を予測できるので、乗員に違和感や不安感を与えることはない。更に第1目標車速をV1km/hrとするとき、αを0.5km/hr〜5km/hrの間の一定値とすれば、上記効果を顕著に奏することができる。
【図面の簡単な説明】
【図1】本発明実施形態の自動車の走行制御装置を示す構成図。
【図2】その走行制御装置の動作を示すフローチャート。
【図3】その走行制御装置による車間距離制御及び定速走行制御の切換え時期を示す図。
【符号の説明】
23 車間距離センサ
27 定速走行用車速設定部
28 車間距離用車速設定部
V1 第1目標車速
【特許請求の範囲】
【請求項1】 一定の車速で走行するための自車の第1目標車速を設定する定速走行用車速設定部(27)と、車間距離センサ(23)で検出した自車と先行車との車間距離が所定の車間距離になるように自車の第2目標車速を設定する車間距離用車速設定部(28)とを備え、前記定速走行用車速設定部(27)により設定される自車の第1目標車速と前記車間距離用車速設定部(28)により設定される自車の第2目標車速とを比較して低い方の車速を自車の最終目標車速とするように制御する自動車の走行制御装置において、定速走行するための自車の第1目標車速をV1とし、この第1目標車速から減速して所定の目標車間距離になるように自車の最終目標車速を第2目標車速に切換えるときにV1からV1−αまでの範囲、及び所定の目標車間距離で走行した第2目標車速から加速して前記第1目標車速になるように自車の最終目標車速を切換えるときにV1からV1+αまでの範囲では、それぞれ現時の自車の最終目標車速を切換えないように制御することを特徴とする自動車の走行制御装置。
【請求項2】 第1目標車速をV1km/hrとするとき、αが0.5km/hr〜5km/hrの間の一定値である請求項1記載の自動車の走行制御装置。
【請求項1】 一定の車速で走行するための自車の第1目標車速を設定する定速走行用車速設定部(27)と、車間距離センサ(23)で検出した自車と先行車との車間距離が所定の車間距離になるように自車の第2目標車速を設定する車間距離用車速設定部(28)とを備え、前記定速走行用車速設定部(27)により設定される自車の第1目標車速と前記車間距離用車速設定部(28)により設定される自車の第2目標車速とを比較して低い方の車速を自車の最終目標車速とするように制御する自動車の走行制御装置において、定速走行するための自車の第1目標車速をV1とし、この第1目標車速から減速して所定の目標車間距離になるように自車の最終目標車速を第2目標車速に切換えるときにV1からV1−αまでの範囲、及び所定の目標車間距離で走行した第2目標車速から加速して前記第1目標車速になるように自車の最終目標車速を切換えるときにV1からV1+αまでの範囲では、それぞれ現時の自車の最終目標車速を切換えないように制御することを特徴とする自動車の走行制御装置。
【請求項2】 第1目標車速をV1km/hrとするとき、αが0.5km/hr〜5km/hrの間の一定値である請求項1記載の自動車の走行制御装置。
【図1】



【図2】

【図3】
【図2】
【図3】
【公開番号】特開2000−38049(P2000−38049A)
【公開日】平成12年2月8日(2000.2.8)
【国際特許分類】
【出願番号】特願平10−207761
【出願日】平成10年7月23日(1998.7.23)
【出願人】(000005463)日野自動車株式会社 (1,484)
【Fターム(参考)】
【公開日】平成12年2月8日(2000.2.8)
【国際特許分類】
【出願日】平成10年7月23日(1998.7.23)
【出願人】(000005463)日野自動車株式会社 (1,484)
【Fターム(参考)】
[ Back to top ]