
Fターム[3G093EB04]の内容
車両用機関又は特定用途機関の制御 (95,902) | 制御対象(機関以外) (4,752) | 機関出力の伝動系、駆動系 (2,822) | 車輪に対するもの (2,377) | ブレーキ (806)
Fターム[3G093EB04]に分類される特許
1 - 20 / 806
車両の制御装置
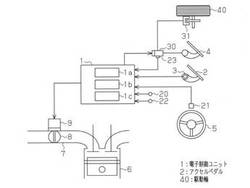
【課題】アクセルの誤操作を適切に判定することにより、駆動力低下によるドライバビリティの悪化を抑えることのできる車両の制御装置を提供する。
【解決手段】電子制御ユニット1は、駆動輪40の駆動力を低下させる駆動力低下制御を実行する。そして電子制御ユニット1は、車両進行方向における障害物の接近を検出してから所定の判定時間が経過した後にアクセルペダル2が操作されたときには、駆動力低下制御として駆動輪40の制動を行う。
(もっと読む)
車間距離制御装置

【課題】より安全性の高いACC走行時の車線変更を実現する。
【解決手段】隣接車線を走行する車両の間を目標スペースとして車線変更する際、隣接車線における先行車両22との車間距離と後続車両23との車間距離とが等しくなるよう車速を制御し、車線変更後は、先行車両22との車間距離をACC設定車間距離に戻す際、後続車両23との車間距離が基準車間距離Lbase以下のときは、減速度を限定した上で先行車両22との車間距離がACC設定車間距離Laccとなるような車速を決定することで、より安全性の高いACC走行時の車線変更を実現する。
(もっと読む)
出力特性制御方法
【課題】車両の負荷量が増加した場合に、車両を停止するために十分な制動力を得るとともに、より効率的に電力を確保すること。
【解決手段】電動車100は、車両重量の変化を検知すると(ステップS1001)、重量の変化量に基づいてバッテリーの目標充電率を設定し(ステップS1002)、目標充電率を達成するために必要な必要発電量を算出する(ステップS1003)。電動車100は、車両の重量変化量、必要発電量、重量変化前における操作量と回生トルクとの対応関係などに基づいて、電動モーター133の回生トルクを変更する(ステップS1004)。
(もっと読む)
走行制御装置、及び移動体の走行制御方法
【課題】走行制限が解除された際の急加速を防止した安全な運転を行うこと
【解決手段】車両1は、アンテナ2を介して走行制限信号を受信する。走行制限信号は、走行制限エリアでの移動体の制限速度を含む。走行制御ECU5は、走行制限エリアでの車両速度を制限速度以下となるように制御する。走行制御ECU5は、アンテナ2を介して走行制限エリアでの走行制限の解除を指示する走行制限解除信号を受信する。走行制御ECU5は、当該受信の際に制限速度を超える加速操作を運転者が行っていた場合、車両1の停止制御を行う。
(もっと読む)
車両の走行制御装置
【課題】車速制限制御に切り換えられた際に、自車両の車速を制限車速に滑らかに収束させると共に、不自然な変速を防止する。
【解決手段】自車両の車速リミッタ作動領域に入っているか否かを調べ(S4)、リミッタ作動領域内に入った場合、ドライバのアクセル操作に基づくドライバ要求トルクTdとリミッタ制御のリミッタ要求トルクTlmとを比較し(S6)、Td>Tlmの場合、リミッタ要求トルクTlmを目標トルクTGTとして設定し(S7)、Td≦Tlmの場合、ドライバ要求トルクTdを目標トルクTGTとして設定し(S8)、自車両の車速をリミッタ車速に円滑に収束させる。また、このとき、クルーズ制御における仮想アクセル開度を用いてリミッタ制御時の変速を制御することで、不自然な変速を防止する。
(もっと読む)
車両の走行制御装置
【課題】車速制限制御の開始タイミングを適正化してドライバに対する違和感や車速超過を抑制する。
【解決手段】自車両の車速がリミッタ車速に向かって上昇していくとき、加速度の大きい場合は早めにリミッタ制御を開始させることで車速超過を抑え、緩やかな加速の場合はなるべくリミッタ制御が介入しないようにしてドライバの意図に沿った運転を可能とする、また、ドライバのアクセル操作による要求トルクからリミッタ制御の要求トルクへの大きなトルク変動が予想される場合には、トルクの繋がりを滑らかにして目標トルクとなるまでに要する時間を考慮し、リミッタ制御の介入タイミングを調整する。そして、最終的に、少なくとも加速度による要因とトルク変動の要因とを総合的に判断してリミッタ作動領域を設定することにより、車速制限制御の開始タイミングを適正化してドライバに対する違和感や車速超過を抑制することができる。
(もっと読む)
内燃機関の制御装置
【課題】内燃機関の制御装置において、運転者が意図的に選択して緩加速を行うことができるようにし、また、緩加速制御を行っている間においてアクセルペダル等の操作量の正確さに神経質を使う必要をなくして運転者への負担を軽減し、さらに、道路事情に合わせて選択させて利便性を高くし、しかも、廉価とすることにある。
【解決手段】車両(1)には、車両加速中の加速度が所定の緩やかな加速度となる緩加速制御の作動と禁止を任意に選択する緩加速制御作動選択手段(18)を設ける。制御手段(14)は、車速が停車とみなせる速度且つ緩加速制御の作動が緩加速制御作動選択手段(18)で選択されている場合であって、ブレーキペダル(9)の操作がなくてアクセルペダル(8)の操作がある場合に、スロットルバルブ(10)の開度が速度制限用開度に一致するように電子スロットル装置(11)を作動制御する。
(もっと読む)
アイドルストップ車両の制御装置
【課題】運転者の意図によらずアイドルストップを終了して機関を再始動しても、車両が意図せずに走り出してしまうのを防止する。
【解決手段】内燃機関のアイドリングの停止中にブレーキを作動させるとともに、内燃機関の再始動に伴ってブレーキを解除させるヒルホールド制御を行い、内燃機関のアイドリングの停止中に運転者の運転姿勢が崩れたことを示唆する所定の事象を検出した場合、内燃機関の再始動条件が成立しても、前記ヒルホールド制御によるブレーキの作動を継続する。
(もっと読む)
車両のブレーキングを制御するための方法
【課題】ブレーキペダルの動作の妨害といったようなブレーキング異常に対処すること。
【解決手段】モータ車両100のブレーキングを制御するための方法であって、ブレーキングシステム140の油圧に関連した情報を受領し;ブレーキペダル表面190に対して印加された圧力に関連した情報を受領し;ブレーキングシステムの油圧とブレーキペダル表面圧力との間の、測定されたブレーキング関係を決定し;所定のブレーキング関係を取得し;測定されたブレーキング関係と所定のブレーキング関係とを比較し;測定されたブレーキング関係が所定のブレーキング関係とは相違するものである場合には、モータ車両の速度を低減し得るよう構成されたブレーキング補助手段を起動する。
(もっと読む)
車両制御装置及び車両システム
【課題】ドライバがパニック状態に陥ったままブレーキペダルと間違えてアクセルペダルを踏んでしまっても、駆動力を安全な領域で制御できるようにする。
【解決手段】入力された自車速情報から自車両が停止状態に遷移して良いか否かを判定する停止状態判定手段と、停止状態判定手段で停止状態に遷移しない場合、入力された自車速情報とクリープ走行情報とからクリープ走行状態に遷移して良いか否かを判定するクリープ走行判定手段と、クリープ走行判定手段でクリープ走行状態に遷移しない場合、入力された自車速情報とクリープ走行情報とアクセルペダル踏込情報から通常走行状態に遷移して良いか否かを判定する通常走行判定手段と、停止状態判定手段とクリープ走行判定手段と通常走行判定手段で判定された走行状態に基づいて、要求駆動力の算出処理方法を切り替え、要求駆動力を算出する要求駆動力算出手段と、を有する。
(もっと読む)
車両用走行支援装置
【課題】 交差点右折時に自車右側から交差点に進入してくる障害物との接触を回避できる車両用走行支援装置を提供する。
【解決手段】 自車が演算された旋回経路を走行した場合のカメラ1の視界領域と死角領域との境界と死角移動物体の予測移動経路との交点を死角端点としたとき、交差点内で検出された自車位置における死角端点の位置を演算する死角端点位置演算部17と、演算された死角端点位置での死角移動物体の移動方向における死角端点の移動速度Vdを演算する死角端点移動速度演算部18と、記憶された死角移動物体の移動状態に基づいて、演算された死角端点位置における死角移動物体の移動速度Vnを検出する死角移動物体移動速度演算部19と、演算された死角端点移動速度Vdが演算された死角移動物体移動速度Vnよりも高くなるように自車速Vを制御する速度制御部20と、を備えた。
(もっと読む)
自動省燃費運転システム
【課題】道路勾配を有する自動車道路において、精度の高い道路勾配データを作り込みながら、道路勾配に応じた最適な自動省燃費運転制御を行うような車両の省燃費運転制御システム及び制御方法の提供。
【解決手段】自車位置検出手段1と、エンジン制御手段2と、補助ブレーキ制御手段3と、車両速度検出手段4と、補助ブレーキ作動確認手段5と、記憶手段8と、自動省燃費運転制御手段10とを有し、自動省燃費運転制御手段10は、道路情報が無い道路を走行する場合は、補助ブレーキの作動状態によって走行中の道路を下り坂の領域L1と、下り坂手前の領域Lxと、下り坂と下り坂手前の領域の何れでもない領域L2とに識別し、記憶手段8に記憶する。
(もっと読む)
車両の衝突時安全装置
【課題】車両衝突時の二次被害を防止および軽減する衝突時安全装置に関し、エアバッグが展開しないような軽度の衝突時の安全策も含めて、簡単な制御によって二次被害を防止および軽減することを目的とする。
【解決手段】自動ブレーキ制御装置5と、エンジン制御装置7と、加速度センサ15と車速センサ17からの信号に基づいて、エアバッグ21、自動ブレーキ制御装置5およびエンジン制御装置7を制御する衝突制御装置9とを備え、衝突制御装置9は衝突時の加速度の大きさを基に重度衝突と軽度衝突とを判定し、重度衝突と判定した場合には、エアバッグを作動させると同時に、自動ブレーキをフルブレーキ状態とし且つエンジンを停止状態にし、軽度衝突と判定した場合には、エアバッグを作動させずに、自動ブレーキを衝突時の加速度に対応した中間ブレーキ力とし且つエンジンを停止状態にすることを特徴とする。
(もっと読む)
内燃機関の自動停止・始動装置
【課題】電力消費の少ない簡単な構成によって内燃機関を確実に再始動できるようにして、バッテリの小型化と製品コストの低減を図ることのできる内燃機関の自動停止・始動装置を提供する。
【解決手段】クランク軸16の回転によって力を蓄える発条装置43を設ける。エンジン10の再始動時には、発条装置43の蓄力を解放してクランク軸16を回転させる。発条装置43の蓄力状態を検出する蓄力センサ79を設ける。ECU70は、蓄力センサ79によって検出される蓄力が充分であることを少なくとも一つの停止許可条件として、エンジン10を自動停止させる。
(もっと読む)
ハイブリッド車両の駆動装置
【課題】クラッチ係合状態からのダウン変速時における変速ショックの抑制と燃費の向上とを両立させるハイブリッド車両の駆動装置を提供する。
【解決手段】クラッチK0が係合された状態からの自動変速機16のダウン変速に先立って、そのクラッチK0のトルク容量を低減させると共に、電気式制動装置74及び前記電動機MGの少なくとも一方による制動力を変化させるものであることから、電気式制動装置74乃至電動機MGにより変速ショックを低減するための補償制御を実行するのに必要なトルクを、クラッチK0のトルク容量低下分だけ確保することができるため、電動機MGによる回生量の減少を抑制しつつ変速ショックの発生を好適に抑制することができる。
(もっと読む)
車両の制御装置
【課題】エンジンのアイドリングストップを行う車両の坂路発進性をより好適に確保することのできる車両の制御装置を提供する。
【解決手段】エンジンのアイドリングストップに応じて行われるヒルホールド制御を、アイドリングストップからの復帰のためのエンジンの再始動指令がなされ(S101:YES)、かつエンジン回転速度が既定の判定値α以上である(S102:YES)ことを条件に解除する(S104)一方で、そうした条件が成立しても、エンジンがアイドリングストップによる停止の途上にあるときには(S103:YES)、ヒルホールド制御を解除しないようにした。
(もっと読む)
車両のブレーキ制御装置
【課題】車両の走行中にエンジンが自動停止し、その後にエンジンを再始動するためにクランキングを行っているときにエンジンの吸気負圧が減少した場合であっても、所要の制動力を発生させることができる車両のブレーキ制御装置を提供すること。
【解決手段】エンジン自動停止・再始動制御手段と、作動中のエンジン1の吸気負圧を利用して運転者のブレーキ踏力をアシストするブースタ(踏力アシスト手段)14と、電動モータ26によって駆動されるポンプによってブレーキ液圧を加圧する加圧制御ユニット21と、を備えた車両のブレーキ制御装置(ECU)13において、再始動条件の成立後にエンジン1の再始動のためのクランキングを行っているときのブースタ14の負圧が設定値以上であるときにはクランキングを中止し、加圧制御ユニット21によってブレーキ液圧を加圧してブースタ14によるアシスト力の不足を補うようにする。
(もっと読む)
車両の衝突被害軽減制御装置
【課題】車両の衝突被害軽減制御装置において、エンジンの自動停止の実施によってシステム動作が阻害されることを防止することにある。
【解決手段】制御手段(7)は、衝突可能性検出手段(11)により車両(1)の衝突の可能性を検出した時には制動力助勢手段(12)の作動と自動制動手段(13)の作動との少なくともどちらか一方を行う衝突被害軽減制御実行手段(14)と、エンジン(2)の自動停止の実施中に衝突被害軽減制御実行手段(14)を実施した場合には、エンジン(2)の自動停止を継続するとともに、制動力助勢手段(12)の制動力を増加させる制動力増加手段(15)とを備える。
(もっと読む)
エンジン制御装置
【課題】アイドルストップ対応車両において、スタータピニオンギアをエンジンのリングギアに予め噛み合わせて、再始動時の始動時間を低減する制御装置では、運転終了時に上記噛み合わせの固着を避けるために解除する必要があり、これを金属間の摩擦力に打ち勝って確実に解除すること。
【解決手段】噛み合わせを解除する際は、ピニオンギア駆動手段が、ピニオンギアに対してリングギアから離脱する方向に作用すると共に、始動装置のスタータモータを回転させることにより、又はエンジンの燃料噴射弁から燃料を噴射し、エンジンのシリンダ内で燃料と空気の混合気に点火することにより、前記噛み合わせを解除すること。
(もっと読む)
車両の制御装置
【課題】クランキング中にABS制御を時間遅れなく行うことができる車両の制御装置を提供すること。
【解決手段】所定の停止条件が成立するとエンジン1を自動停止し、その後に所定の始動条件が成立するとスタータモータ2を起動してエンジン1を再始動する自動停止始動装置と、車両の減速度と各車輪の回転速度及びブレーキ液圧に基づいて前輪4L,4Rと後輪5L,5Rの最適回転速度を算出し、算出した最適回転速度に基づいて電磁弁を開閉制御してブレーキ液圧を制御するABSと、を有する車両の制御装置において、前記自動停止始動装置によるエンジン1の再始動中にABS制御信号を受信すると同時に省電力モードによって前記ABS制御を開始する。ここで、省電力モードによるABS制御においては、ABSのポンプモータを駆動しない。
(もっと読む)
1 - 20 / 806
[ Back to top ]