
Fターム[3D044AC55]の内容
定速走行制御及び計器板 (7,800) | 定速走行制御・入力信号 (1,301) | 車両外部状況に関するもの (369)
Fターム[3D044AC55]の下位に属するFターム
Fターム[3D044AC55]に分類される特許
1 - 20 / 33
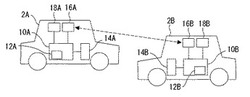
車両の制御装置及び車両制御用情報の車両間相互利用システム
【課題】メモリに記憶している環境情報がクリアされてしまった場合でも、環境情報を用いた車両の制御を高い制御精度で継続して行えるようにする。
【解決手段】記憶手段12Aの記憶内容がクリアされた場合、車車間通信手段16Aによって自車両2Aを基準とする所定エリア内の他車両2Bに対し、他車両2Bが有する環境情報の送信を要求する。そして、他車両2Bから送信された環境情報を取得し、自車両2Aに関する環境情報として記憶手段12Aに記録する。
(もっと読む)
車両制御装置

【課題】自車両が車間距離制御中又は定速走行制御中の周辺車両交通の円滑さを向上させる車両制御装置を提供すること。
【解決手段】車両に搭載され、車間距離制御及び定速走行制御を行う車両制御装置が、車間距離制御中又は定速走行中に自車両後方から自車両を追い越そうとしている車両が検出されたとき、自車両の車速を抑制する。本車両制御装置は、自車両後方に検出された後続車両が自車両と同一の車線から隣接車線へ車線変更し、且つ、当該後続車両の車速が自車両の車速より大きく、且つ、自車両と当該後続車両との車間時間が所定値以下となったとき、当該後続車両を上記自車両を追い越そうとしている車両であると判断する。
(もっと読む)
表示制御装置
【課題】乗員にとって有効で、視認性や操作性が良好な情報を表示することができる表示制御装置を提供すること。
【解決手段】車両の乗員の着座位置を検出し(ステップS10)、この検出した乗員の着座位置を基準として車載アプリケーション毎の画像情報の属性を含む画像属性情報に基づいてディスプレイ6a、6b、・・・、6n毎に表示すべき画像情報を決定し(ステップS20)し、この決定したディスプレイ6a、6b、・・・、6n毎に表示すべき画像情報をディスプレイ6a、6b、・・・、6nに表示する(ステップS30)。
(もっと読む)
運転支援装置
【課題】 自車両の操向制御と加速動作とを協調的に適切に制御する。
【解決手段】 走行制御部26は、走行状態判定部25の判定結果に応じて、物体と自車両との接触発生を回避あるいは接触発生時の被害を軽減するようにして自車両の走行状態を制御する接触回避動作(例えば、ブレーキアクチュエータ14による減速動作およびEPSアクチュエータ17による操向動作)が制御される際、あるいは、自車両と物体との接触発生を回避するべく運転者による回避動作が実行されている際、あるいは、走行路認識部28により検出された走行区分線に沿って適正に走行する車線維持動作として、所定程度以上の運転支援が実行されている際には、例えば操作者によって実行が指示された速度制御または追従制御による自車両の加速を規制(つまり、制限または禁止)する。
(もっと読む)
車載用表示装置
【課題】共通の表示手段に形成され運転席側と助手席側との異なる方向から視認できる運転席用画面及び助手席用画面に運転席用画像及び助手席用画像をそれぞれ表示する車載用表示装置であって、操作に応じて理想的な画像の表示を行うことができる車載用表示装置を提供する。
【解決手段】車載用表示装置は、D席画像又はP席画像を操作する操作ボタン群152及びタッチパネル130と、D席画像を操作ボタン群及びタッチパネルの操作対象とするD席モードとP席画像を操作ボタン群及びタッチパネルの操作対象とするP席モードとを切り替える切替ボタン151と、モードの状態に応じて、操作ボタン群152及びタッチパネル130からの操作入力に対するD席画像及びP席画像を決定する制御部20を備えている。
(もっと読む)
ドライバ状態検出装置、車載警報装置、運転支援システム
【課題】ドライバの運転状態を総合的に検出することができるドライバ状態検出装置を提供する。
【解決手段】自車両の進行方向に先行車両が存在する場合、ドライバからみた先行車両の像の大きさの変化度合いを示すドライバ状態係数Kを算出し、このドライバ状態係数Kからドライバの運転状態を検出する。
(もっと読む)
車速制御装置
【課題】車両の進行方向にある物体に対する衝突回避性を高めて安全性の向上に寄与することができるようにする。
【解決手段】
物体検出手段25によって車両10の進行方向に物体が検出されなかった場合、または、この物体が追従対象判定手段32により追従対象であると判定されなかった場合に、目標車速を維持するための駆動力を発生するように駆動源11を制御する巡航制御を実行する巡航走行制御手段34と、追従対象判定手段32により物体が追従対象であると判定されなかった場合であって且つ所定の加速規制条件が満たされた場合に、巡航制御の実行よりも優先的に、車両10の加速を規制するように駆動源11を制御する加速規制制御を実行する加速規制手段37とをそなえて構成する。
(もっと読む)
自動車の追従走行システム
【課題】
自車両と前方車両との目標車間距離を維持しながら自車両を前方車両に追従走行させる自動車の追従走行システムにおいて、自車両の走行環境に適合した目標車間距離を迅速・確実に設定することを課題とする。
【解決手段】
追従走行システムは、自車両と前方車両との目標車間距離の設定に用いる補正係数を道路毎及び月日時刻毎の過去の交通情報に基いて生成する生成部22aと、前記補正係数を道路毎及び月日時刻毎に記録する記録部22bと、自車両が走行中の道路を検出するナビゲーションシステム20と、現在の月日時刻を検出するコントロールユニット10とを有し、前記目標車間距離は、前記記録部22bで記録されている補正係数のうちナビゲーションシステム20で検出された道路及びコントロールユニット10で検出された月日時刻に該当する補正係数を用いて設定される。
(もっと読む)
作業用車両に搭載される表示装置、及び同表示装置の表示方法
【課題】作業用車両に異常が発生した場合であっても、作業中のオペレータによる安全確認が妨げられず、作業用車両に異常が発生したことをオペレータに知らせることができる表示装置を提供する。
【解決手段】カメラ2を備えた作業用車両に搭載される表示装置1であって、モニター画面3と、前記作業用車両の状態に関する情報をモニター画面に表示する第1表示手段と、前記カメラで撮影した画像をモニター画面に表示する第2表示手段と、前記モニター画面に表示する画面情報を切り替え可能な第1切り替え手段4と、前記作業用車両の異常を検出する異常検出手段と、前記モニター画面の一部に警報情報を表示する警報表示手段と、前記作業用車両が作業中か否かの検出を行う動作検出手段と、前記モニター画面に表示する画面情報を前記第1表示手段による画面情報に自動的に切り替える第2切り替え手段とを備えている表示装置。
(もっと読む)
車両用運転操作補助装置および車両用運転操作補助装置を備えた車両
【課題】
自車両の予測進路と前方障害物との重なり度合および運転者の追い越し意図を考慮して車両制御を行う車両用運転操作補助装置を提供する。
【解決手段】
車両用運転操作補助装置は、自車両の前方障害物に対するリスクポテンシャルを算出し、前方障害物との接触のリスクが高い場合には、自車両に発生する駆動力を低下するとともに、アクセルペダルを操作するときに発生する操作反力を増大させる。自車両が前方障害物を追い越す意図があると判断されると、自車両の予測進路と前方障害物との重なり度合に応じて駆動力の低下量を小さくするとともに、アクセルペダルに発生する操作反力を小さくする。アクセルペダル操作状態を自車速に応じて設定される閾値と比較して、運転者の追越意図を判断する。追越意図ありと判断された場合は、自車速が速いほど駆動力および操作反力の調整量を大きくする。
(もっと読む)
車両用表示装置及び方法
【課題】 表示の自由度を低下させ難く且つ走行状態情報の視認時間が長くなってしまうことを防止することが可能な車両用表示装置及び方法を提供する。
【解決手段】 本装置1は、表示を車両乗員の指示によらずに切り替える場合、走行状態情報の表示位置を変化させずに大きさを変化させることとしている。また、本装置1は、追加表示情報を追加して表示するときには走行状態情報の表示を確保しつつ追加表示情報を予め定められた箇所に表示することとしている。従って、表示の自由度を低下させ難く且つ走行状態情報の視認時間が長くなってしまうことを防止することができる。
(もっと読む)
車両用表示装置及び方法
【課題】運転者が獲得した運転操作に対する車両挙動の記憶を混乱させることなく、運転者の運転操作に対する集中力を高める。
【解決手段】自車両の運動に連動した流動表示を運転者の視野内に提示する流動表示制御装置2と、運転者のアクセルの踏み込み量の変化、転舵、ブレーキの踏み込みの運転操作入力を監視するECU1とを備え、ECU1による監視に基づいて、これらの運転操作入力がある間、すなわち、投影運転者の運転操作が定常状態から変化していると判断される間、流動表示制御装置2により流動表示を提示する。
(もっと読む)
先行車追従制御装置
【課題】先行車追従制御が行われており、かつ、車両の停止保持制御が行われている状態で、先行車追従制御を終了する操作が行われても、車両の停止保持を継続する。
【解決手段】先行車追従制御が行われている時に、車両が停止すると、EPKB11によって車両の停止保持制御を行う。この状態で、先行車追従制御を終了する操作がドライバによって行われると、EPKB11による車両の停止保持を継続した状態で、先行車追従制御だけを終了する。
(もっと読む)
ハイドロプレーニング状態判定装置
【課題】
湿潤路を走行中に車輪と路面との接触が断たれ、ハイドロプレーニングが発生したことを正確に判定する。
【解決手段】
送信波を送信する送信機能と、前記送信機能で送信した送信波の反射波を受信する受信機能と、前記送信機能から送信する送信波を車輪の後ろの路面に送信し、送信波の路面からの反射波を前記受信機能で受信して、ハイドロプレーニングの発生状態を判定するハイドロプレーニング状態判定機能とを備えたことを特徴とするハイドロプレーニング状態判定装置。
(もっと読む)
車両用表示装置
【課題】 運転者などの乗員に対する利便性を向上する。
【解決手段】 車両用のコンビネーションメータAは、車室内のインストルメントパネルにて車両後方に向けて配置される表示パネル部10cと、受信回路60で受信される天気予報情報を表示パネル部10cにより表示させるマイクロコンピュータ40とを備える。したがって、天気予報情報が表示パネル部10cにより表示されて運転者などの乗員に報知される。
(もっと読む)
車両周辺視認装置
【課題】駐車の場合に車両の後方及び側方の画像を表示装置に表示させるとともに、後方の画像中には車両の後部の予測軌跡を表示させ、側方の画像中には車両の前側端部の予測軌跡を表示させることによって、車両の周辺の範囲であって駐車の際に必要な範囲の情報を的確に把握することができ、運転者が不安を感じることなく、容易に、かつ、安全に駐車を行うことができるようにする。
【解決手段】車両の状況を取得する状況取得装置と、車両の周辺を撮影する撮影装置と、撮影装置が撮影した画像を表示する表示装置とを有する車両周辺視認装置であって、状況取得装置が取得した車両の状況に基づいて駐車が行われると判定すると、車両の後方及び側方の画像を表示装置に表示させるとともに、後方の画像中には車両の後部の予測軌跡を表示させ、側方の画像中には車両の前側端部の予測軌跡を表示させる。
(もっと読む)
車両用表示装置
【課題】携帯端末の着信を安全に運転者に伝達することができるとともに携帯端末の機種にかかわらず低コストで利用できる車両用表示装置を提供すること。
【解決手段】携帯電話機10の表示窓10Aで表示される着信元情報を含む画像を撮像する撮像手段3と、この撮像手段3で撮像された画像を表示するヘッドアップディスプレイ5とを備える。携帯電話機10の着信が車両の運転時であっても、運転者はヘッドアップディスプレイ5を見ることで、着信があったことを認識することができる。そして、運転者は正面からヘッドアップディスプレイ5に視線を変更すれば足り、その角度はきわめて小さい。
(もっと読む)
車両周辺視認装置
【課題】運転者が、車両の走行状態に応じて必要性の高い範囲の画像を視認することができ、不安を感じることなく、容易に、かつ、安全に運転を行うことができるようにする。
【解決手段】車両の状況を取得する状況取得装置と、前記車両の周辺を撮影する撮影装置と、該撮影装置が撮影した画像を表示する表示装置とを有する車両周辺視認装置であって、前記車両の後方の画像を前記表示装置に表示させるとともに、前記後方の画像中に前記車両の後端からの距離を表す目盛りを表示させ、前記状況取得装置が取得した車両の状況に基づいて前記目盛りの間隔を変更させる。
(もっと読む)
車両用表示装置
【課題】 赤外線カメラで撮影した映像中に運転者にとって危険となり得る対象物が存在する場合、運転者が運転する状況に合わせてその対象物を明示する。
【解決手段】 赤外線カメラ10で撮影される映像の中から、運転者にとって危険となり得る対象物を検出し、対象物の座標およびサイズのデータを出力する検知部20と、複数の状況を検出すると共に、検出した複数の状況をそれぞれ検出信号として出力する重み検出部30と、重み検出部30から入力される複数の検出信号にそれぞれ対応する重み係数を付与し、それら重み係数を用いて演算を行い、その結果から運転者に対象物の存在を知らせる場合に対象物を明示して表示する注意喚起画像を作成する注意喚起部40と、赤外線カメラ10で撮影された映像に対して、対象物が存在する位置に注意喚起画像を重ね合わせて画像表示する表示部50と、を有する。
(もっと読む)
車両用走行支援装置
【課題】 物体の種類に応じて最接近時の自車と物体との安全距離を適切に設定し、その安全距離に基づいて適切な走行支援制御を行う車両用走行支援装置を提供する。
【解決手段】走行支援制御ECUは、物体検出手段(ステップ102)が自車の進行方向の物体を検出し、物体識別手段(ステップ104)が物体の種類を識別し、安全距離設定手段(ステップ106)が物体識別手段により識別した物体の種類に応じて安全距離ΔKLを設定し、危険予測手段(ステップ108〜114)が物体検出手段により検出した物体と自車Maとの最接近時に安全距離ΔKLが確保されるか否かを予測し、走行支援制御手段(ステップ118)が、危険予測手段が物体と自車Maとの最接近時に安全距離ΔKLが確保されないと予測したときに走行支援制御を行う。
(もっと読む)
1 - 20 / 33
[ Back to top ]