
Fターム[5H180LL09]の内容
Fターム[5H180LL09]に分類される特許
1 - 20 / 1,973
走行道路推定システム
【課題】車両がこれから走行する可能性のある道路を推定する精度を向上させ、現在位置を道路データ上に同定するマップマッチング処理及び車両制御や情報通知を適切に行う。
【解決手段】車両ナビゲーション装置1は、現在位置が同定された道路データに対応する道路である推定基準道路に接続している道路毎に車速や信号機の状態や走行レーンの状態等に基づいて車両が走行可能であるか否かを判定し、車両が走行不可能であると判定した道路を推定対象から除外し、車両が走行可能であると判定した道路だけを推定対象として車両がこれから走行する可能性のある道路だけを推定走行道路として推定する。
(もっと読む)
車両の周辺監視装置

【課題】車両に搭載されたカメラにより撮像した画像に基づいて車両の周辺の対象物を検出し、該対象物についての警報を運転者に発行した場合に、該警報が発せられることによって車両のふらつきが発生することがある。
【解決手段】車両に搭載された撮像装置によって撮像した画像に基づいて車両周辺の対象物を検出し、該撮像画像に基づく表示画像を、該車両の乗員が視認可能なように表示装置上に表示する。対象物が車両から所定範囲内にあるときには、該表示画像上に該対象物に関する警報を行う。該車両には、運転者によるステアリングホイールの操舵を補助するパワーステアリング装置が備えられており、少なくとも上記の警報を発している間にわたり、ステアリングホイールの操舵を補助するアシスト量を低減するように、パワーステアリング装置を制御する。
(もっと読む)
運転支援装置
【課題】複数の死角が存在する場合に安全運転支援制御を行うときの運転者に対する不快感を軽減する運転支援装置を提供することを課題とする。
【解決手段】車両からの死角に対して安全運転支援制御を行う運転支援装置であって、車両の周辺環境を認識する周辺環境認識手段と、その認識した周辺環境に基づいて車両からの死角を検出する死角検出手段と、死角検出手段での検出結果に基づいて第1条件を満たした場合に死角に対する安全運転支援制御を稼動させる制御稼動手段と、安全運転支援制御を稼動した後に、死角検出手段での検出結果に基づいて第1条件とは異なる第2条件を満たさない場合に安全運転支援制御を停止させる制御停止手段を備えることを特徴とする。
(もっと読む)
運転支援装置、及びその方法
【課題】複数の注意対象が存在する場合には、常に運転支援制御の内容を変更する処理をすることのできる運転支援装置、及びその方法を提供する。
【解決手段】車両の周囲の状況を示す状況情報を取得する取得手段と、予め定められた設定値にしたがって車両の走行状態の制御をする制御手段と、制御手段によって走行状態の制御が開始される前に、取得手段によって、予め定められた2種類以上の状況を示す状況情報が取得されたとき、設定値を変更する変更手段とを備える。
(もっと読む)
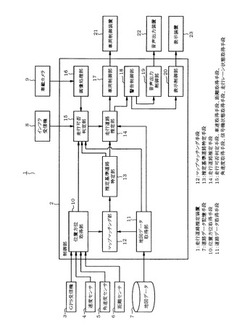
移動体位置検出装置
【課題】位置情報精度を高めることができると共に、常時、その高い位置情報精度を維持できる移動体位置検出装置を提供する。
【解決手段】レーザレーダ3の検出データに基づく周辺物の複数の節点sと、地図データ上の当該周辺物の複数の節点mとを対応付け、その対応付けられた各組の節点s、mを用いて、座標変換式に基づき誤差θ、qx、qyを算出し、その誤差θ、qx、qyに基づきGPSにより検出された自車1位置を補正する。これにより、ありふれて存在する周辺物に関する複数の節点に基づき誤差算出を可能とし、誤差算出精度を高めると共に、位置補正頻度を高める。
(もっと読む)
制御装置及び運転安全性保護方法
【課題】運転者の保護者が、運転者(保護対象者)の運転動作の制限を自ら設定し、また、この運転動作の制限に応じて運転動作の制御を行えるようにする。
【解決手段】車両を使用する使用者を識別する情報又は使用者が分類されるカテゴリを識別する情報と、使用者の行為又は使用者の運転時の車両状態と、その行為又は車両状態が検出された場合の動作制御方法とを規定した制御情報を制御情報格納部130に格納する。ある運転者が車両を実際に運転する際には、使用者認証部140において特定された運転者に対応する制御情報を参照して、車載検出部から供給される検出結果情報に対応する動作制御方法を特定し、動作制御部150が、その動作制御方法に基づいて車載装置の動作制御(駆動制御、警告報知、保護者への通報)などを行う。
(もっと読む)
車両制御装置
【課題】自車両と前方物標との間の衝突を防止するための運転支援を、衝突の危険性の度合に応じて行うことができる車両制御装置を提供する。
【解決手段】判定ユニットにより、少なくとも自車両と前方物標との間の相対速度に基づいた第1の値と、前記自車両と前記前方物標との間の相対加速度に基づいた第2の値の算出および前記第1の値、前記第2の値が閾値を超えたか否かの判定を行い、前記判定ユニットにより前記第1の値、前記第2の値が閾値を超えたと判定され、運転支援ユニットが前記自車両の運転支援を行う際、前記第1の値及び前記第2の値の双方が閾値を超えた場合は、前記第1の値もしくは前記第2の値の一方が閾値を超えた場合よりも、前記運転支援の介入量を多くする。これにより、自車両と前方物標との間の衝突を防止するための運転支援を衝突の危険性の度合に応じて行うことができる。
(もっと読む)
車群走行制御装置
【課題】通信エラーが生じている期間も追従車が先導車に追従する走行制御を行うことができる車群走行制御装置を提供する。
【解決手段】先導車は、先導車走行計画決定部104で、今後の自車両の走行制御値を示す先導車走行計画を決定し、走行計画送信処理部106では、その先導車走行計画を無線機30から送信する。これにより、先導車は、今後の自車両の走行制御値を事前に送信することになる。追従車はこの先導車走行計画を受信する。追従車は、通信エラーにより先導車走行計画が一時的に受信できない場合が生じても、その通信エラーが生じた時点において先導車が行う走行制御値を事前に受信している。そのため、通信エラーが生じている期間も追従車は先導車に追従する走行制御を行うことができる。
(もっと読む)
走行支援装置、方法およびプログラム
【課題】走行安定性を低下させることなく目標位置において目標車速以下となるように走行支援を行うこと。
【解決手段】車両の前方に存在する目標位置および当該目標位置における目標車速を示す情報を取得し、前記車両の前方に存在する路面の摩擦度合が所定の基準より小さい低摩擦区間の長さを示す情報を取得し、前記車両の現在位置と前記目標位置との間に前記低摩擦区間が存在する場合、前記車両の現在位置と前記目標位置との間に前記低摩擦区間が存在しない場合に前記目標位置において車速を前記目標車速以下にさせる走行支援を行う際の走行支援開始位置よりも、前記低摩擦区間の長さだけ車両側の位置から前記走行支援を開始するとともに、前記低摩擦区間においては前記走行支援を中断する。
(もっと読む)
電動車椅子の走行制御方法
【課題】障害物検知センサより障害物を検知して電動車椅子を走行停止させる機能させている電動車椅子において、障害物への衝突抑制制御を行いつつ、障害物の近傍迂回や離合、すれ違い、室内の壁際へ車体を収めるとなどの難しい操作を容易行える電動車椅子を提供する。
【解決手段】障害物を検知して走行禁止判定となり走行が一旦停止した後に、再度操作手段を停止以前と同じ方向に操作された場合は、注意喚起のため警報を発報ながら走行を許可する、さらに障害物の存在が判っている条件下では、自動的に速度を最低速に抑える制限を設けると共に、走行速度に応じて障害物検知の感度を変更する事によって、衝突の危険性を最小限押さえながら、すり抜けや狭所へ電動車椅子を収めると言った緻密な操作が容易となる。
(もっと読む)
運転支援装置
【課題】 安価な構成で運転技術が高くない人が陥りやすい多くの場面において安全運転に寄与することができる運転支援装置を提供する。
【解決手段】 測定手段2は、車両前後に取り付けられ、車両から障害物までの距離を測定し距離情報を取得する。車両情報収集手段5は、車内ネットワークより車両情報を取得する。誤発進判定手段3は、距離情報及び車両情報に基づいて車両の誤発進を判定する。追突推定手段3は、距離情報及び前記車両情報に基づいて後続車両との追突可能性を推定する。警報手段4は、誤発進判定手段及び追突推定手段の判定結果に基づいて警報を行う。車両情報収集手段5は、少なくとも速度情報及びギアポジション情報を取得する。
(もっと読む)
車両制御装置
【課題】自車両周囲に車々間通信できない他車両が存在して、協調走行制御の安全性に影響を与えないようにする。
【解決手段】車々間通信できない他車両のうち、協調走行制御の制御内容に影響を与える他車両を検出し、協調走行制御の制御内容を変更する。車々間通信により前方車両と所定の車間距離を保持しつつ追従走行する制御中は、前方車両との車間距離を長く設定する。
(もっと読む)
車両の走行制御システム
【課題】走行車両を軌道に沿って走行させる走行制御システムを提供する。
【解決手段】走行車両200は、走行方向と直交する方向の両側において同軸上に配置された左右一対の車輪210、210を有し、これら車輪210、210にトルク指令を与えることで走行する。摩擦路面には、軌道Lから離れるに従って摩擦が小さくなるように摩擦係数の分布が設定されている。走行車両200は、左右の車輪210、210に対し同じトルク指令値を与えながら走行する。
(もっと読む)
車両制御装置
【課題】車々間通信できない他車両のうち、協調走行制御の制御内容に影響を与える他車両を検出し、画面上でその他車両を強調して表示する。
【解決手段】車々間通信機能を有していない他車両であって、自車両の協調走行制御の制御内容を変更する可能性のある制御対象車両を特定し、その車両のアイコンを地図画面上で強調表示する。
(もっと読む)
レーダ装置、物体検知システム、および、物体検知方法
【課題】レーダ装置で異なる物体情報を一つの物体と誤判定することを防止する技術を提供する。
【解決手段】第1の走査の代表検知点が第2の走査において存在しない場合、第1の走査において検知された代表検知点の次に車両に近い検知点を第2の走査における代表検知点に設定する。この第2の代表検知点が、第1の走査の代表検知点の位置から遠方側に所定距離以上に離れた位置に存在する場合は、第1の代表検知点と第2の代表検知点とを異なる物体の情報と判定する。これにより、異なる物体を一つの物体と誤判定することに起因する物体の移動方向の誤った判定を防止できる。
(もっと読む)
車両用制御装置
【課題】 構成を複雑化・高コスト化することなく、なおかつ、カメラに無駄な電力を消費させて寿命低下を招かない形で、呼気中のアルコール濃度を検査する被験者の顔画像を確実に撮影できる車両用制御装置を提供する。
【解決手段】 車両の運転席に着座したユーザーの呼気に含まれるアルコール濃度を測定するための検出器2に対し、初期状態から予め定められた安定検出可能状態に移行させるための検出準備処理を実行させるとともに、当該検出準備処理中に定められた検出器2の検出情報に基づいて定められた中間状態を特定し、中間状態が特定されるに伴い撮影装置5の主電源を投入し、該撮影装置5を撮影可能状態に移行させるための撮影準備処理を実行させることにより、撮影装置5の撮影可能状態への移行が完了した後、直ちに検出器2の安定検出可能状態への移行が完了するようにする。
(もっと読む)
運転支援装置
【課題】自車両周辺の移動体の将来の移動状態を高精度に予測する運転支援装置を提供することを課題とする。
【解決手段】自車両周辺の移動体の将来の移動状態を予測し、当該将来の移動状態に基づいて運転支援を行う運転支援装置1であって、移動体の現在の移動状態を取得する移動状態取得手段10と、取得した移動体の現在の移動状態に基づいて移動体の将来の移動状態を予測する移動状態予測手段32と、移動体周辺の交通規則情報を取得する交通規則情報取得手段11を備え、移動状態予測手段32は、取得した交通規則情報を用いて移動体の将来の移動状態を予測することを特徴とする。
(もっと読む)
車群走行制御装置
【課題】同報通信により車群走行制御を行う車群走行制御装置において、自車両が車群の先頭から何番目かを決定できるようにする。
【解決手段】追従車両3は、自律センサ情報によって得た直前車両の加減速情報80と無線情報として取得した2つの加減速情報70、71とを比較する。これにより、加減速情報71が直前車両のものであることが分かる。また、追従車両3は、矢印Lの検出結果から最後尾であることが分かる。無線情報には車両の識別符号も含まれているので、追従車両3は、加減速情報71を送信した車両が最後尾から2番目の車両であることを同報送信する。その後、最後尾から2番目の車両は、最後尾の車両と同様にして直前車両を特定する。この処理を先頭車両まで順々に行なっていくことで、先頭車両は車群の車両台数が分かる。その後、先頭車両は、車群の車両台数に基づいて各車両が先頭から何番目かを決定して、決定した情報を同報送信する。
(もっと読む)
自動運転装置
【課題】 自車両の自動運転を行うにあたり、自車両の周囲における交通環境に応じた走行制御を行うことにより、自車両の周囲における交通環境の妨げを防止することができる自動運転装置を提供する。
【解決手段】 自動運転装置における自動制御ECU1は、走行中の道路に対して道なりに走行させる自動運転制御を行うにあたり、自車両が走行する車線の状態を検出し、検出した車線の状態に基づいて、自動運転制御を行う。たとえば、自車両が走行する道路に自車走行車線が道なり走行可能である道なり車線があるにも係わらず、自車両が道なり車線でない車線を走行している場合には、自車両を道なり車線に移動させる進路を生成する。また、自車両が走行する道路に道なり車線が複数ある場合には、道なり走行に好適となる道なり車線に自車両を移動させる進路を生成する。
(もっと読む)
車両制御システム、その制御方法、及び制御プログラム
【課題】安全性と利便性を最適に両立した車両制御システム、その制御方法、及び制御プログラムを提供すること。
【解決手段】車両制御システム10は、車両周辺の混雑の度合いを示す混雑度を検出する混雑度検出手段と、混雑度検出手段により検出された車両周辺の混雑度に基づいて、車両の最高速度を設定する速度設定手段と、を備えている。また、速度設定手段は、混雑度検出手段により検出された車両周辺の混雑度が増加するに従って、車両の最高速度を減少させる。
(もっと読む)
1 - 20 / 1,973
[ Back to top ]