
Fターム[5H180LL01]の内容
Fターム[5H180LL01]に分類される特許
1 - 20 / 3,374
走行道路推定システム
【課題】車両がこれから走行する可能性のある道路を推定する精度を向上させ、現在位置を道路データ上に同定するマップマッチング処理及び車両制御や情報通知を適切に行う。
【解決手段】車両ナビゲーション装置1は、現在位置が同定された道路データに対応する道路である推定基準道路に接続している道路毎に車速や信号機の状態や走行レーンの状態等に基づいて車両が走行可能であるか否かを判定し、車両が走行不可能であると判定した道路を推定対象から除外し、車両が走行可能であると判定した道路だけを推定対象として車両がこれから走行する可能性のある道路だけを推定走行道路として推定する。
(もっと読む)
危険判定装置及びプログラム

【課題】可動物の数が増えても計算時間の増大を抑制して、衝突の危険性を判定することができるようにする。
【解決手段】可動物進入可能性マップのブロックに格納された可動物粒子の移動状態を、ランダムデータに基づいて変更して、各可動物粒子が格納されるブロックを移動させることを繰り返し行う。各可動物粒子の移動により、遷移制約を受ける領域のブロックに格納された場合、可動物粒子を消滅させると共に、同じ可動物の可動物粒子を複製して、同じ可動物の他の可動物粒子が格納されたブロック又はその周辺のブロックに、複製された可動物粒子を格納する。他の可動物の可動物粒子と重複したことにより消滅した可動物粒子の組み合わせの消滅位置を示す消滅情報を記録する。記録された消滅情報の消滅位置に基づいて、可動物同士が衝突する危険性がある位置を判定する。
(もっと読む)
運転支援装置、及びその方法
【課題】複数の注意対象が存在する場合には、常に運転支援制御の内容を変更する処理をすることのできる運転支援装置、及びその方法を提供する。
【解決手段】車両の周囲の状況を示す状況情報を取得する取得手段と、予め定められた設定値にしたがって車両の走行状態の制御をする制御手段と、制御手段によって走行状態の制御が開始される前に、取得手段によって、予め定められた2種類以上の状況を示す状況情報が取得されたとき、設定値を変更する変更手段とを備える。
(もっと読む)
車両接近報知システム
【課題】車両の接近をより適切に報知することのできる車両接近報知システムを提供する。
【解決手段】制御装置20は、撮像装置10から入力された画像情報に基づいて歩行者の有無及び顔の向きを検出し、歩行者を検出できたが歩行者の顔を検出できなかったことに基づいて車両の接近を報知する必要があると判断する。また、制御装置20は、当該制御装置20に接続された接近音出力装置30に対し、車両の接近を報知する必要の有無についての判断結果を出力し、接近音出力装置30は、車両の接近を報知する必要があるとの判断結果が入力された場合には車両接近音を出力する一方、車両の接近を報知する必要がないとの判断結果が入力された場合には車両接近音を出力しない。
(もっと読む)
像変化判定装置、方法およびプログラム
【課題】非連続的に形成された静止物を解析対象として正確に移動体が移動しているか否かを判定する技術の提供。
【解決手段】車両の進行方向に沿って所定間隔で存在する静止物を視野に含む車載カメラによって所定の周期で撮影された複数の画像を示す画像情報を取得し、前記複数の画像に含まれる前記静止物の像が前記車両の周辺に存在する移動体の移動に起因して変化したか否かを判定する。
(もっと読む)
車両の周辺監視装置
【課題】車両に搭載されたカメラにより撮像した画像に基づいて車両の周辺の対象物を検出し、該対象物についての警報を運転者に発行した場合に、該警報が発せられることによって車両のふらつきが発生することがある。
【解決手段】車両に搭載された撮像装置によって撮像した画像に基づいて車両周辺の対象物を検出し、該撮像画像に基づく表示画像を、該車両の乗員が視認可能なように表示装置上に表示する。対象物が車両から所定範囲内にあるときには、該表示画像上に該対象物に関する警報を行う。該車両には、運転者によるステアリングホイールの操舵を補助するパワーステアリング装置が備えられており、少なくとも上記の警報を発している間にわたり、ステアリングホイールの操舵を補助するアシスト量を低減するように、パワーステアリング装置を制御する。
(もっと読む)
レーダ装置及びコンピュータプログラム
【課題】レーダで検知した対象物が低背検知対象物であるか否か判別することができる電子走査型レーダ装置を提供する。
【解決手段】電波を送信する送信アンテナ3と、前記送信された電波が対象物により反射された電波を受信する受信アンテナ11から1nと、前記受信された電波に基づいて前記対象物までの距離を検出する距離検出部24と、前記検出した距離の関数として、前記受信された電波の電力を算出する受信電力算出部22と、所定の距離区間において、前記関数を表す曲線を1つの境界として定まる領域の面積を算出する面積算出部28と、前記算出した面積に基づいて前記対象物を低背検知対象物であるか否か判定する検知処理部29と、を備える。
(もっと読む)
車載用環境認識装置及び車載用環境認識システム
【課題】車両旋回時や、対象物が自車から近距離で画像上移動量が大きい場合であっても、高精度且つ安定的なトラッキングが実現できる車載用環境認識装置を提供する。
【解決手段】車載用撮像装置から取得した画像から予め記憶されたパターン形状を用いて対象物候補を抽出し、対象物候補の位置を出力する簡易パターンマッチング部120と、取得された画像が複数に分割された領域毎に異ならせて設定された対象物の変化量予測計算方法と、検出された自車両挙動情報と、入力された対象物候補の位置と、に基づいて、抽出された対象物候補の変化量予測を計算し、対象物の予測位置を出力する領域別変化量予測部160と、入力された対象物の予測位置に基づいて対象物をトラッキングするトラッキング部170と、を有する。
(もっと読む)
車両の周辺監視装置
【課題】危険性の度合いについて運転者の速やかな認識を可能にしつつ、視界の状態にかかわらず、表示装置上の映像に依存せずに直接的な前方の目視を運転者に促すような表示を行う手法を提供する。
【解決手段】撮像装置によって取得された画像に基づいて、車両の周辺の所定の対象物を検出し、該撮像画像に基づいて生成される表示画像を、車両の乗員が視認可能なように表示装置上に表示するとともに、対象物が該車両に対して所定の位置関係にある場合に、該表示画像上の該対象物を強調的に表示する。さらに、車両の周辺の視界状態を推定する。視界状態が良好と推定された場合には、表示画像上で、車両から所定距離の位置に第1の強調表示を表示し、視界状態が良好ではないと推定された場合、視界状態が良好と推定された場合に比べ、該第1の強調表示を、車両側に近づけて表示する。
(もっと読む)
電柱広告塔を利用した交通安全装置、交通安全システム、および交通安全方法
【課題】表示面を大型化することなく、しかも、見る者に交通安全情報を強く印象付けることができる態様で、電柱設置の電子広告を利用して交通安全情報を提供すること。
【解決手段】交差点Xをなす二本の道路RDの交差点X付近にある一対の電柱11に電柱広告塔101を設置する。電柱広告塔101は、交差点Xに進入する方向から見られるように電柱11に取り付けられた電子的な表示装置Dを備え、交差点Xに向かう物体Oが交差点Xの手前所定距離まで近づいたことを検出する近接検出と交差点Xに至ったことを検出する到来検出とを実行し、近接検出に応じて警告開始信号を、到来検出に応じて警告終了信号を、死角となる道路RDの側に設置される別の電柱広告塔101に向けて送信出力する。表示装置Dに広告情報を表示させている時、警告開始信号を受信してから警告終了信号を受信するまでの間、表示装置Dの表示を広告情報から警告情報に切り替える。
(もっと読む)
車両の警報装置及びそれを用いた車両
【課題】モータ駆動走行の車両60から発生させる警告音が周辺の静粛性を損ねる。
【解決手段】車両60の車載レーダ20から前方対象物(人)10を認識した場合、前方の所定範囲Wsetと設定距離Dset01の範囲内ではステップS108で警告音の音量大、他の範囲では、対象物(人)10が車両60に背を向いて遠ざかる相対速度Vrtargetが車両速度Vspより大きい場合はステップS110で警告音の音量中、対象物(人)10が車両60に向かって近づく相対速度Vrtargetが車両速度Vspより小さい場合はステップS112で警告音の音量小を発生させる。
(もっと読む)
横断歩道検出装置、横断歩道検出システム,横断歩道検出方法及びプログラム
【課題】道路の状況にかかわらず、横断歩道を精度良く検出する。
【解決手段】メインパターンを用いたスキャン動作によって得られたデータに所定の演算処理を実行する。次に、この演算処理の演算結果と、メインパターンMPの所定の画像上の位置との関係を示す特性曲線を算出する。そして、特性曲線に現れるピークの規則性に基づいて、所定の画像に横断歩道が写っているか否を判断する。上述のデータは、メインパターンを構成するサブパターンそれぞれと重なる画素の輝度の平均である。このため、横断歩道を構成する白色パターンに亀裂が生じていたり、白色パターンに剥離が生じていたりしても、データの値は、ほとんど影響を受けない。したがって、所定の画像に横断歩道が写っているか否かを精度よく判断することができる。
(もっと読む)
運転支援装置及びプログラム
【課題】他の走行体視点の状況も考慮した精度の高い衝突判定を行う。
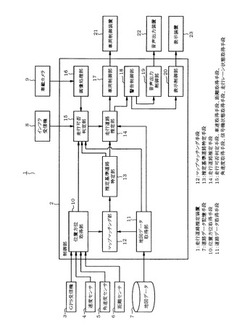
【解決手段】環境認識部32で、レーザレーダ12、撮像装置14、GPS装置16、車両センサ18の各データ、及び地図情報を用いて、自車両の現在の状況及び自車両を基準とした他の走行体の状況を示す自車両ベクトルと、他の走行体の現在の状況及び他の走行体を基準とした自車両及びその他の他の走行体の状況を示す走行体ベクトルを算出する。行動予測部40で、算出された自車両ベクトル及び走行体ベクトルと、変化モデル記憶部38に記憶された自車両及び他の走行体の行動状態の変化を予測するための自車両変化モデル及び走行体変化モデルとを照合して、自車両及び他の走行体の行動状態の変化を予測し、衝突判定部42で、予測結果に基づいて、自車両と他の走行体との相対距離を算出して、自車両と他の走行体との衝突の可能性を判定する。
(もっと読む)
物体認識装置
【課題】車両と認識対象である物体との距離が変化しても、車載レーダの反射の検出パターンから車両、モータバイク、人(歩行者)等を区別して精度よく認識することができる技術を提供する。
【解決手段】探査対象となる物体とレーザレーダ2との距離に応じて変化するレーザレーダ2の反射の検出パターンが、距離ごとの特徴パターンとして物体の種類別に記憶部7に記憶されており、レーザレーダ2の反射の検出パターンと、記憶部7に記憶された特徴パターンとが認識処理部4により照合されて検出パターンの物体の種類が識別されるため、車両と認識対象である物体との距離が変化しても、レーザレーダ2の反射の検出パターンから車両、モータバイク、自転車、歩行者(人)等を区別して精度よく認識することができる。
(もっと読む)
運転支援システム
【課題】リアルタイムに、運転者の実情に合わせて、休憩を促すことができる運転支援システムを提供する。
【解決手段】車両の運転を支援する運転支援システム100に、車両の運転者に休憩取得のアドバイスを通知する液晶表示装置5及びスピーカ6の少なくとも一方と、車両のふらつきを検出するふらつき検知部3と、ふらつき閾値を記憶するHDD2と、車両の所定時間あたりのふらつきの回数がふらつき閾値を超えているか否かを判定し、車両の所定時間あたりのふらつきの回数がふらつき閾値を超えていると判定した場合に、液晶表示装置5及びスピーカ6の少なくとも一方を制御して、運転者に休憩取得のアドバイスを通知させるCPU7と、を備えた。
(もっと読む)
車両周辺監視装置
【課題】グレースケール画像に対して微分フィルタによるフィルタ処理を実施してから、2値画像を生成したときに、対象物の画像の欠損が生じることを抑制した車両周辺監視装置を提供する。
【解決手段】レーザーレーダー8により検出された物体と車両との相対位置に基づいて、微分フィルタによるフィルタ処理が実施されたフィルタ処理後画像Im2内に、該物体の実空間における位置及び大きさに対応した位置及び大きさの処理対象領域を設定する処理対象領域設定部15と、フィルタ処理後画像Im2に対して、前記処理対象領域を、前記処理対象領域の設定対象となった物体と前記車両との距離が短いほど低い輝度値に設定された2値化閾値により2値化する処理を行って、2値画像を生成する2値画像生成部14とを備える。
(もっと読む)
車両制御装置
【課題】自車両と前方物標との間の衝突を防止するための運転支援を、衝突の危険性の度合に応じて行うことができる車両制御装置を提供する。
【解決手段】判定ユニットにより、少なくとも自車両と前方物標との間の相対速度に基づいた第1の値と、前記自車両と前記前方物標との間の相対加速度に基づいた第2の値の算出および前記第1の値、前記第2の値が閾値を超えたか否かの判定を行い、前記判定ユニットにより前記第1の値、前記第2の値が閾値を超えたと判定され、運転支援ユニットが前記自車両の運転支援を行う際、前記第1の値及び前記第2の値の双方が閾値を超えた場合は、前記第1の値もしくは前記第2の値の一方が閾値を超えた場合よりも、前記運転支援の介入量を多くする。これにより、自車両と前方物標との間の衝突を防止するための運転支援を衝突の危険性の度合に応じて行うことができる。
(もっと読む)
安全度提示装置及びプログラム
【課題】自車両と先行車両との追突前に生じる様々な現象を考慮して、ドライバの運転を安全側へ移行させる。
【解決手段】追従状況判定部22で、車間距離センサ12及び車速センサ14の検出値に基づいて、自車両と先行車両とが追突する可能性があるか否かを判定し、追従度算出部24で、先行車両との追突の可能性があると判定された場合に、車間距離センサ12及び車速センサ14の検出値に基づいて、車間距離及び相対速度Vrを用いた追従度、車間距離及び自車両の速度Vfを用いた追従度、並びに車間距離及び先行車両の減速度Apを用いた追従度を含む複数の追従度を算出し、安全度演算部26で、算出された複数の追従度に基づいて、1つの追従安全度を演算し、表示装置18に表示する。安全度更新部28では、安全度演算部26での演算の基準を走行開始からの経過時間に応じて更新する。
(もっと読む)
渋滞情報提供装置、方法及びコンピュータプログラム
【課題】あらゆる道路を走行している車両に対して、渋滞情報を提供可能とする。
【解決手段】情報提供サーバ1は、道路リンクの位置が定義されている地図データを記憶した地図データ記憶部14と、異なる時刻における車両の位置を示す車両位置データを記憶するプローブデータ記憶部13と、地図データ及び車両位置データに基づいて、各道路リンクの車両の走行速度を推定する速度推定部15と、推定された各道路リンクの車両の走行速度が所定速度以下である渋滞リンクを抽出する渋滞リンク抽出部19と、地図データに基づいて、渋滞リンクの上流につながっている上流リンクを特定し、車両位置データに基づいて、上流リンク内の車両である上流車両を特定する上流車両特定部21と、上流車両の車載装置に対して、渋滞情報を出力する渋滞情報送信部23と、を備える。
(もっと読む)
走行支援装置
【課題】水平方向のリスクポテンシャルと認識された障害物が自車両の走行に影響を与えない場合における不必要な走行支援を抑制することが可能な走行支援装置を提供する。
【解決手段】本発明の一実施形態に係る走行支援装置1は、自車両周辺の対象物を認識する車外情報認識手段31と、対象物各々の水平方向のリスクポテンシャルの分布を作成するリスク分布作成手段32と、水平方向のリスクポテンシャルの分布におけるリスクポテンシャルの高さ情報を取得する高さ情報取得手段33と、リスクポテンシャルの高さ情報が自車両の車高に対して所定値以上である場合、リスクポテンシャルの発生位置は走行可能であると判断する走行可否判断手段34と、リスクポテンシャルの発生位置が走行可能である場合には、リスクポテンシャルの発生位置を自車両の走行経路とする当該走行経路作成手段35と、を備える。
(もっと読む)
1 - 20 / 3,374
[ Back to top ]