
走行支援装置
【課題】水平方向のリスクポテンシャルと認識された障害物が自車両の走行に影響を与えない場合における不必要な走行支援を抑制することが可能な走行支援装置を提供する。
【解決手段】本発明の一実施形態に係る走行支援装置1は、自車両周辺の対象物を認識する車外情報認識手段31と、対象物各々の水平方向のリスクポテンシャルの分布を作成するリスク分布作成手段32と、水平方向のリスクポテンシャルの分布におけるリスクポテンシャルの高さ情報を取得する高さ情報取得手段33と、リスクポテンシャルの高さ情報が自車両の車高に対して所定値以上である場合、リスクポテンシャルの発生位置は走行可能であると判断する走行可否判断手段34と、リスクポテンシャルの発生位置が走行可能である場合には、リスクポテンシャルの発生位置を自車両の走行経路とする当該走行経路作成手段35と、を備える。
【解決手段】本発明の一実施形態に係る走行支援装置1は、自車両周辺の対象物を認識する車外情報認識手段31と、対象物各々の水平方向のリスクポテンシャルの分布を作成するリスク分布作成手段32と、水平方向のリスクポテンシャルの分布におけるリスクポテンシャルの高さ情報を取得する高さ情報取得手段33と、リスクポテンシャルの高さ情報が自車両の車高に対して所定値以上である場合、リスクポテンシャルの発生位置は走行可能であると判断する走行可否判断手段34と、リスクポテンシャルの発生位置が走行可能である場合には、リスクポテンシャルの発生位置を自車両の走行経路とする当該走行経路作成手段35と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自車両の周辺状況に応じて走行経路を作成し、当該走行経路に基づいて自車両の走行支援を行う走行支援装置に関するものである。
【背景技術】
【0002】
白線、ガードレール、縁石等の自車両周辺の道路情報(対象物情報)を認識して、これらの情報に応じて走行経路を作成し、当該走行経路に基づいて自車両の走行支援を行う走行支援装置が知られている。更に、先行車両、対向車両、歩行者、電柱、標識、樹木等の自車両周辺の障害物情報(対象物情報)を認識して、当該障害物を回避するような走行経路を作成し、当該走行経路に基づいて自車両の走行支援を行う走行支援装置が知られている。特許文献1には、この種の走行支援装置が開示されている。
【0003】
特許文献1に開示の走行支援装置は、自車両前方で認識した障害物に基づいてリスクポテンシャル(潜在的な危険度)の分布を生成すると共に、自車両前方に自車両との相対位置に応じて異なる複数の座標点群を設定し、自車両直前の座標に設定した走行確率を、リスクポテンシャルの分布状態に応じた分布比に従って、自車両近傍の座標から遠方の座標へと順次に分配する。そして、各座標に分配した走行確率に基づいて、走行確率が閾値以上である領域を、すなわち、リスクポテンシャルが小さい領域を、自車両が走行可能な走行領域として設定する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2009−169535号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載の走行支援装置では、水平方向の平面的なスクポテンシャルのみに基づいて自車両が走行可能な走行経路を設定するので、例えば、障害物が道路にせり出した樹木等であり、その下を車両が充分に走行可能である場合にも、障害物を回避するような不必要な走行支援を行ってしまう。
【0006】
そこで、本発明は、水平方向のリスクポテンシャルと認識された障害物が自車両の走行に影響を与えない場合における不必要な走行支援を抑制することが可能な走行支援装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明の走行支援装置は、自車両の周辺状況に応じて走行経路を作成し、当該走行経路に基づいて自車両の走行支援を行う走行支援装置において、自車両周辺の対象物の情報を認識する車外情報認識手段と、自車両に対して対象物各々が及ぼす水平方向のリスクポテンシャルの分布を作成するリスク分布作成手段と、水平方向のリスクポテンシャルの分布におけるリスクポテンシャルの高さ情報を取得する高さ情報取得手段と、リスクポテンシャルの高さ情報が自車両の車高に対して所定値以上である場合、リスクポテンシャルの発生位置は走行可能であると判断する走行可否判断手段と、水平方向のリスクポテンシャルの分布に基づいて自車両の走行経路を作成する走行経路作成手段であって、リスクポテンシャルの発生位置が走行可能である場合には、リスクポテンシャルの発生位置を自車両の走行経路とする当該走行経路作成手段と、を備える。
【0008】
この走行支援装置によれば、水平方向のリスクポテンシャルの分布におけるリスクポテンシャルの高さ情報を取得して、リスクポテンシャルの発生位置の走行可否を判断し、リスクポテンシャルの発生位置が走行可能である場合にはリスクポテンシャルの発生位置を自車両の走行経路とするので、水平方向のリスクポテンシャルと認識された障害物(対象物)が道路にせり出した樹木等であり、自車両の走行に影響を与えない場合における不必要な走行支援を抑制することが可能となる。
【発明の効果】
【0009】
本発明によれば、水平方向のリスクポテンシャルと認識された障害物が自車両の走行に影響を与えない場合における不必要な走行支援を抑制することができる。
【図面の簡単な説明】
【0010】
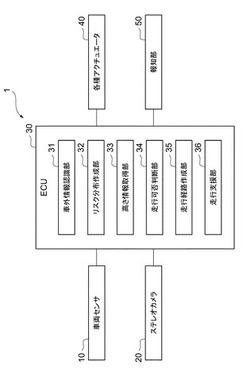
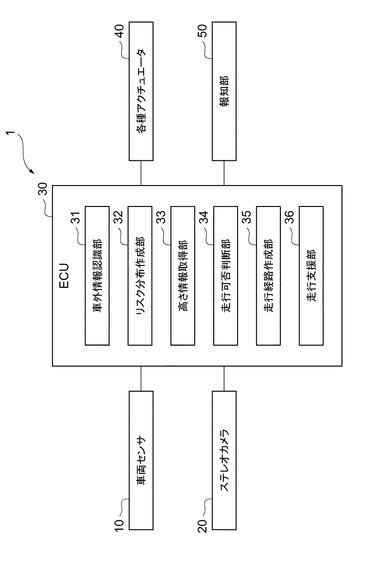
【図1】本発明の第1の実施形態に係る走行支援装置の構成を示す図である。
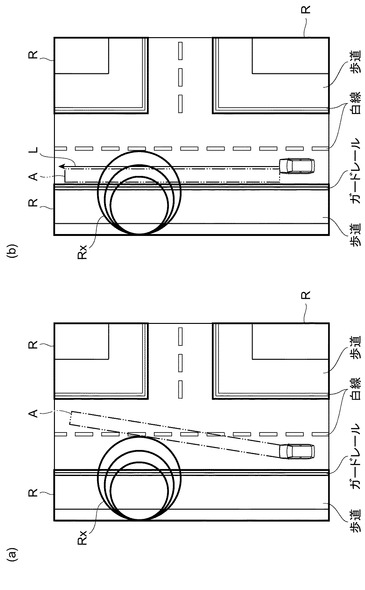
【図2】第1の実施形態の走行支援装置による俯瞰リスクマップを示す図である。
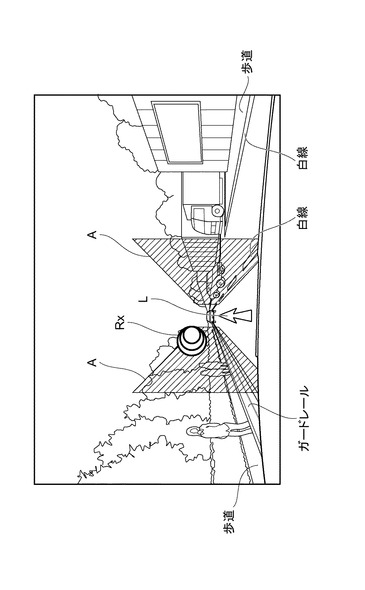
【図3】第1の実施形態の走行支援装置による高さ方向リスクマップを示す図である。
【図4】第1の実施形態の走行支援装置による走行支援処理を示すフローチャートである。
【図5】本発明の第2の実施形態に係る走行支援装置の構成を示す図である。
【図6】第2の実施形態の走行支援装置による俯瞰リスクマップを示す図である。
【図7】第2の実施形態の走行支援装置による走行支援処理を示すフローチャートである。
【発明を実施するための形態】
【0011】
以下、図面を参照して本発明の好適な実施形態について詳細に説明する。なお、各図面において同一又は相当の部分に対しては同一の符号を附すこととする。
[第1の実施形態]
【0012】
図1は、本発明の第1の実施形態に係る走行支援装置を示す図である。図1に示す走行支援装置1は、車両センサ10と、ステレオカメラ(障害物認識部)20と、電子制御ユニット(以下、ECU:Electronic Control Unitという。)30と、各種アクチュエータ40と、報知部50とを備えている。
【0013】
車両センサ10は、自車両の速度、加速度(減速度)、ヨーレート、ステアリングホイール操舵角、ブレーキペダル踏量、アクセルペダル踏量などを検出する。車両センサ10は、検出した各信号をECU30へ送信する。
【0014】
ステレオカメラ20は、2台のCCDカメラからなり、2台のCCDカメラが水平方向に所定間隔離間されて配置されている。ステレオカメラ20は、例えば、自車両の前側の中央に取り付けられる。ステレオカメラ20では、2つのCCDカメラで撮像した左右のステレオ画像のデータを各画像信号としてECU30へ送信する。
【0015】
ECU30は、演算を行うCPU(Central Processing Unit)、CPUに各処理を実行させるためのプログラム等を記憶するROM(ReadOnly Memory)、演算結果などの各種データを記憶するRAM(Random Access Memory)などから構成されている。このような構成により、ECU30には、車外情報認識部31と、リスク分布作成部32と、高さ情報取得部33と、走行可否判断部34と、走行経路作成部35と、走行支援部36とが構築されている。
【0016】
車外情報認識部31は、ステレオカメラ20から各画像信号を取り入れる。これらの画像信号に基づいて、車外情報認識部31は、自車両の周辺状況、すなわち、自車両周辺の道路情報や障害物情報(対象物情報)を認識する。具体的には、車外情報認識部31は、道路情報として白線、ガードレール、縁石等を抽出すると共に、障害物情報として先行車両、対向車両、歩行者、電柱、標識、樹木等を抽出し、これらの対象物について自車両との距離、自車両に対する横位置及び縦位置などの位置情報を求める。
【0017】
例えば、車外情報認識部31は、撮像した画像から画像認識(エッジ抽出やパターン認識処理など)によって対象物を抽出する。そして、車外情報認識部31は、左右のステレオ画像における対象物の見え方のずれを利用して三角測量方式により自車両と対象物との距離を求める。また、車外情報認識部31は、検出した対象物の幅方向の両端部を検出し、自車両の進行方向と2つの端部の方向とのなす角度を求め、その角度から横位置を求める。同様に、車外情報認識部31は、検出した対象物の縦方向の両端部を検出し、自車両の進行方向と2つの端部の方向とのなす角度を求め、その角度から縦位置を求める。
【0018】
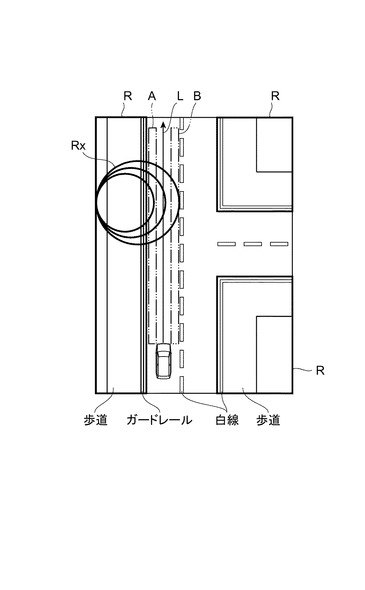
リスク分布作成部32は、認識した対象物、すなわち道路情報や障害物各々が自車両に対して及ぼす水平方向のリスクポテンシャル(潜在的な危険度)を演算する。そして、リスク分布作成部32は、対象物の位置情報及び求めた水平方向のリスクポテンシャルR,Rxに基づいて、水平方向のリスクポテンシャルの分布を俯瞰リスクマップとして作成する(図2(a))。
【0019】
高さ情報取得部33は、俯瞰リスクマップにおけるリスクポテンシャルR,Rxの高さ情報を取得する。例えば、高さ情報取得部33は、リスクポテンシャルR,Rxの高さ情報として、高さ方向のリスクポテンシャルの分布を取得する。具体的には、高さ情報取得部33は、認識した対象物、すなわち道路情報や障害物各々が自車両に対して及ぼす垂直方向のリスクポテンシャルを演算する。そして、高さ情報取得部33は、対象物の位置情報及び求めた垂直方向のリスクポテンシャルに基づいて、垂直方向のリスクポテンシャルの分布を高さ方向リスクマップとして作成する。
【0020】
走行可否判断部34は、リスクポテンシャルR,Rxの発生位置の走行可否を判断する。具体的には、走行可否判断部34は、高さ方向リスクマップに基づいて、リスクポテンシャルR,Rxの高さが自車両の車高に対して所定値以上である場合、そのリスクポテンシャルの発生位置は走行可能であると判断する。
【0021】
本実施形態では、まず、高さ情報取得部33によって、自車両の両端から障害物のリスクポテンシャルRxへ向けた領域であって、リスクポテンシャルRxの端に接する領域を、垂直方向のリスクポテンシャルの分布を取得する初期位置Aとして設定し(図2(a))、この初期位置Aの高さ方向リスクマップを作成する(図3)。そして、走行可否判断部34によって、初期位置Aの高さ方向リスクマップに基づいて、リスクポテンシャルRxの端位置の高さ、すなわち走行可否を判断する。
【0022】
そして、リスクポテンシャルRxの端位置の下が走行可能である場合には、高さ情報取得部33によって、高さ情報取得位置をリスクポテンシャルRx側へ所定量だけ移動して、再び高さ方向リスクマップを作成し、走行可否判断部34によって、リスクポテンシャルRxの位置の高さ、すなわち走行可否の判断を行う。これらの処理を、高さ方向リスクマップにおけるリスクポテンシャルRxの下が走行不可になるまで、又は、リスクポテンシャルRxの下は走行可能であるが道路側方のリスクポテンシャルRに達するまで(図2(b))、繰り返すことにより、リスクポテンシャルRxの発生位置の走行可否を判断することが可能となる。
【0023】
走行経路作成部35は、リスクポテンシャルRxの発生位置が走行可能である場合には、リスクポテンシャルRxの発生位置に走行経路Lを作成する(図2(b))。一方、リスクポテンシャルRxの発生位置が走行不可である場合には、俯瞰リスクマップに基づいてリスクポテンシャルRxを回避する走行経路を作成する。
【0024】
走行支援部36は、車両センサ10によって検出された各種情報に基づいて、スロットルアクチュエータやブレーキアクチュエータなどの各種アクチュエータ40を制御して、走行経路に沿って走行するためのアシスト走行制御を行う。又は、走行支援部36は、ディスプレイによる画像表示報知や、スピーカ又はブザー等による音声報知などを行う報知部50を制御して、ドライバが走行経路に沿って走行するように誘導するためのアシスト制御を行う。
【0025】
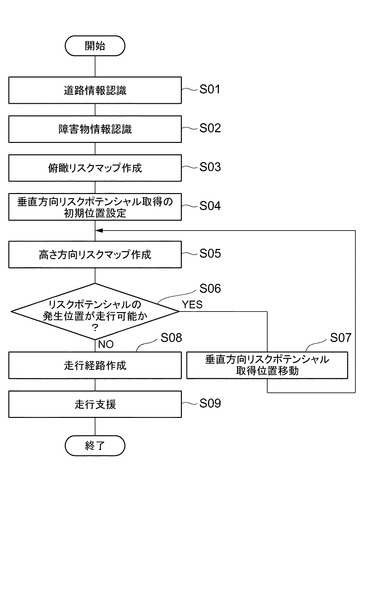
次に、第1の実施形態の走行支援装置1の動作を説明する。図4は、第1の実施形態の走行支援装置による走行支援処理を示すフローチャートである。
【0026】
まず、車外情報認識部31によって、ステレオカメラ20からの画像信号に基づいて、自車両周辺の道路情報として白線、ガードレール、縁石等を認識し、これらの対象物について自車両との距離、自車両に対する横位置及び縦位置などの位置情報を求める(ステップS01)。また、車外情報認識部31によって、ステレオカメラ20からの画像信号に基づいて、自車両周辺の障害物情報として先行車両、対向車両、歩行者、電柱、標識、樹木等を認識し、これらの対象物について自車両との距離、自車両に対する横位置及び縦位置などの位置情報を求める(ステップS02)。
【0027】
次に、リスク分布作成部32によって、認識した道路情報や障害物各々が自車両に対して及ぼす水平方向のリスクポテンシャルを演算し、求めた水平方向のリスクポテンシャル及び道路情報や障害物の位置情報に基づいて、水平方向のリスクポテンシャルの分布を俯瞰リスクマップとして作成する(図2(a))(ステップS03)。
【0028】
次に、高さ情報取得部33によって、垂直方向のリスクポテンシャルの分布を取得する初期位置Aを設定し(図2(a))(ステップS04)、この初期位置Aの高さ方向リスクマップを作成する(図3)(ステップS05)。次に、初期位置Aの高さ方向リスクマップに基づいて、走行可否判断部34によって、リスクポテンシャルRxの端位置の走行可否を判断する(ステップS06)。
【0029】
リスクポテンシャルRxの端位置が走行可能である場合には、高さ情報取得部33によって、高さ情報取得位置をリスクポテンシャルRx側へ所定量だけ移動して(ステップS07)、再び高さ方向リスクマップを作成し、走行可否判断部34によって走行可否の判断を行う。これらの処理を、高さ方向リスクマップにおけるリスクポテンシャルRxの下が走行不可になるまで、又は、リスクポテンシャルRxの下は走行可能であるが道路側方のリスクポテンシャルRに達するまで(図2(b))、繰り返すことにより、リスクポテンシャルRxの発生位置の走行可否を判断することが可能となる。
【0030】
次に、走行経路作成部35によって、リスクポテンシャルRxの発生位置が走行可能である場合には、リスクポテンシャルRxの発生位置に走行経路Lを作成し(図2(b))、リスクポテンシャルRxの発生位置が走行不可である場合には、俯瞰リスクマップに基づいてリスクポテンシャルRxを回避する走行経路を作成する(ステップS08)。そして、この走行経路に基づいて、走行支援部36によってシスト制御が実行される(ステップS09)。
【0031】
このように、第1の実施形態の走行支援装置1によれば、俯瞰リスクマップにおけるリスクポテンシャルの高さ情報を取得して、リスクポテンシャルの発生位置の走行可否を判断し、リスクポテンシャルの発生位置が走行可能である場合にはリスクポテンシャルの発生位置を自車両の走行経路とするので、水平方向のリスクポテンシャルと認識された障害物が道路にせり出した樹木等であり、自車両の走行に影響を与えない場合における不必要な走行支援を抑制することが可能となる。
[第2の実施形態]
【0032】
図5は、本発明の第2の実施形態に係る走行支援装置の構成を示す図である。図5に示す第2の実施形態の走行支援装置1Aは、ECU30に代えてECU30Aを備えている構成で第1の実施形態の走行支援装置1と異なっている。走行支援装置1Aのその他の構成は、走行支援装置1と同一である。
【0033】
ECU30Aは、高さ情報取得部33、走行可否判断部34、走行経路作成部35に代えて高さ情報取得部33A、走行可否判断部34A、走行経路作成部35Aを備えている構成でECU30と異なっている。ECU30Aのその他の構成は、ECU30と同一である。
【0034】
高さ情報取得部33Aは、自車両の左右両側部から走行車線に沿って車両進行方向へ向けた2つの領域を、垂直方向のリスクポテンシャルの分布を取得する位置A,Bとして設定し(図6)、これらの位置A,Bの高さ方向リスクマップを作成する点で、高さ情報取得部33とは異なる。そして、走行可否判断部34Aは、これらの位置A,Bの高さ方向リスクマップに基づいて、リスクポテンシャルRxの位置A,Bの高さ、すなわち走行可否を判断する。
【0035】
走行経路作成部35Aは、リスクポテンシャルRxの位置A,Bが走行可能である場合には、リスクポテンシャルRxにおける位置A,Bの間の中心位置に走行経路Lを作成する点で、走行経路作成部35とは異なる(図6)。
【0036】
次に、第2の実施形態の走行支援装置1Aの動作を説明する。図7は、第2の実施形態の走行支援装置による走行支援処理を示すフローチャートである。
【0037】
まず、上記同様ように、ステップS01〜S03までの処理が行われる。
【0038】
次に、高さ情報取得部33Aによって、垂直方向のリスクポテンシャルの分布を取得する2つの位置A,Bを設定し(図6)(ステップS04A)、これらの位置A,Bの高さ方向リスクマップを作成する(ステップS05A)。次に、位置A,Bの高さ方向リスクマップに基づいて、走行可否判断部34Aによって、リスクポテンシャルRxの位置A,B
の走行可否を判断する(ステップS06A)。
【0039】
次に、走行経路作成部35Aによって、リスクポテンシャルRxの位置A,Bが走行可能である場合には、リスクポテンシャルRxにおける位置A,Bの間の中心位置に走行経路Lを作成し(図6)(ステップS08A−1)、リスクポテンシャルRxの位置A,Bが走行不可である場合には、俯瞰リスクマップに基づいてリスクポテンシャルRxを回避する走行経路を作成する(ステップS08A−2)。そして、この走行経路に基づいて、走行支援部36によってシスト制御が実行される(ステップS09)。
【0040】
この第2の実施形態の走行支援装置1Aでも、俯瞰リスクマップにおけるリスクポテンシャルの高さ情報を取得して、リスクポテンシャルの発生位置の走行可否を判断し、リスクポテンシャルの発生位置が走行可能である場合にはリスクポテンシャルの発生位置を自車両の走行経路とするので、水平方向のリスクポテンシャルと認識された障害物が道路にせり出した樹木等であり、自車両の走行に影響を与えない場合における不必要な走行支援を抑制することが可能となる。
【0041】
なお、本発明は上記した本実施形態に限定されることなく種々の変形が可能である。例えば、本実施形態では、自車両周辺の道路情報及び障害物情報を認識するためにステレオカメラを用いたが、単眼画像カメラや、ミリ波レーダ、電波センサ、レーザレーダなど様々なセンサを用いてもよい。
【符号の説明】
【0042】
1,1A…走行支援装置、10…車両センサ、20…ステレオカメラ、30…ECU、31…車外情報認識部(車外情報認識手段)、32…リスク分布作成部(リスク分布作成手段)、33,33A…情報取得部(情報取得手段)、34,34A…走行可否判断部(走行可否判断手段)、35,35A…走行経路作成部(走行経路作成手段)、36…走行支援部、40…各種アクチュエータ、50…報知部。
【技術分野】
【0001】
本発明は、自車両の周辺状況に応じて走行経路を作成し、当該走行経路に基づいて自車両の走行支援を行う走行支援装置に関するものである。
【背景技術】
【0002】
白線、ガードレール、縁石等の自車両周辺の道路情報(対象物情報)を認識して、これらの情報に応じて走行経路を作成し、当該走行経路に基づいて自車両の走行支援を行う走行支援装置が知られている。更に、先行車両、対向車両、歩行者、電柱、標識、樹木等の自車両周辺の障害物情報(対象物情報)を認識して、当該障害物を回避するような走行経路を作成し、当該走行経路に基づいて自車両の走行支援を行う走行支援装置が知られている。特許文献1には、この種の走行支援装置が開示されている。
【0003】
特許文献1に開示の走行支援装置は、自車両前方で認識した障害物に基づいてリスクポテンシャル(潜在的な危険度)の分布を生成すると共に、自車両前方に自車両との相対位置に応じて異なる複数の座標点群を設定し、自車両直前の座標に設定した走行確率を、リスクポテンシャルの分布状態に応じた分布比に従って、自車両近傍の座標から遠方の座標へと順次に分配する。そして、各座標に分配した走行確率に基づいて、走行確率が閾値以上である領域を、すなわち、リスクポテンシャルが小さい領域を、自車両が走行可能な走行領域として設定する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2009−169535号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載の走行支援装置では、水平方向の平面的なスクポテンシャルのみに基づいて自車両が走行可能な走行経路を設定するので、例えば、障害物が道路にせり出した樹木等であり、その下を車両が充分に走行可能である場合にも、障害物を回避するような不必要な走行支援を行ってしまう。
【0006】
そこで、本発明は、水平方向のリスクポテンシャルと認識された障害物が自車両の走行に影響を与えない場合における不必要な走行支援を抑制することが可能な走行支援装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明の走行支援装置は、自車両の周辺状況に応じて走行経路を作成し、当該走行経路に基づいて自車両の走行支援を行う走行支援装置において、自車両周辺の対象物の情報を認識する車外情報認識手段と、自車両に対して対象物各々が及ぼす水平方向のリスクポテンシャルの分布を作成するリスク分布作成手段と、水平方向のリスクポテンシャルの分布におけるリスクポテンシャルの高さ情報を取得する高さ情報取得手段と、リスクポテンシャルの高さ情報が自車両の車高に対して所定値以上である場合、リスクポテンシャルの発生位置は走行可能であると判断する走行可否判断手段と、水平方向のリスクポテンシャルの分布に基づいて自車両の走行経路を作成する走行経路作成手段であって、リスクポテンシャルの発生位置が走行可能である場合には、リスクポテンシャルの発生位置を自車両の走行経路とする当該走行経路作成手段と、を備える。
【0008】
この走行支援装置によれば、水平方向のリスクポテンシャルの分布におけるリスクポテンシャルの高さ情報を取得して、リスクポテンシャルの発生位置の走行可否を判断し、リスクポテンシャルの発生位置が走行可能である場合にはリスクポテンシャルの発生位置を自車両の走行経路とするので、水平方向のリスクポテンシャルと認識された障害物(対象物)が道路にせり出した樹木等であり、自車両の走行に影響を与えない場合における不必要な走行支援を抑制することが可能となる。
【発明の効果】
【0009】
本発明によれば、水平方向のリスクポテンシャルと認識された障害物が自車両の走行に影響を与えない場合における不必要な走行支援を抑制することができる。
【図面の簡単な説明】
【0010】
【図1】本発明の第1の実施形態に係る走行支援装置の構成を示す図である。
【図2】第1の実施形態の走行支援装置による俯瞰リスクマップを示す図である。
【図3】第1の実施形態の走行支援装置による高さ方向リスクマップを示す図である。
【図4】第1の実施形態の走行支援装置による走行支援処理を示すフローチャートである。
【図5】本発明の第2の実施形態に係る走行支援装置の構成を示す図である。
【図6】第2の実施形態の走行支援装置による俯瞰リスクマップを示す図である。
【図7】第2の実施形態の走行支援装置による走行支援処理を示すフローチャートである。
【発明を実施するための形態】
【0011】
以下、図面を参照して本発明の好適な実施形態について詳細に説明する。なお、各図面において同一又は相当の部分に対しては同一の符号を附すこととする。
[第1の実施形態]
【0012】
図1は、本発明の第1の実施形態に係る走行支援装置を示す図である。図1に示す走行支援装置1は、車両センサ10と、ステレオカメラ(障害物認識部)20と、電子制御ユニット(以下、ECU:Electronic Control Unitという。)30と、各種アクチュエータ40と、報知部50とを備えている。
【0013】
車両センサ10は、自車両の速度、加速度(減速度)、ヨーレート、ステアリングホイール操舵角、ブレーキペダル踏量、アクセルペダル踏量などを検出する。車両センサ10は、検出した各信号をECU30へ送信する。
【0014】
ステレオカメラ20は、2台のCCDカメラからなり、2台のCCDカメラが水平方向に所定間隔離間されて配置されている。ステレオカメラ20は、例えば、自車両の前側の中央に取り付けられる。ステレオカメラ20では、2つのCCDカメラで撮像した左右のステレオ画像のデータを各画像信号としてECU30へ送信する。
【0015】
ECU30は、演算を行うCPU(Central Processing Unit)、CPUに各処理を実行させるためのプログラム等を記憶するROM(ReadOnly Memory)、演算結果などの各種データを記憶するRAM(Random Access Memory)などから構成されている。このような構成により、ECU30には、車外情報認識部31と、リスク分布作成部32と、高さ情報取得部33と、走行可否判断部34と、走行経路作成部35と、走行支援部36とが構築されている。
【0016】
車外情報認識部31は、ステレオカメラ20から各画像信号を取り入れる。これらの画像信号に基づいて、車外情報認識部31は、自車両の周辺状況、すなわち、自車両周辺の道路情報や障害物情報(対象物情報)を認識する。具体的には、車外情報認識部31は、道路情報として白線、ガードレール、縁石等を抽出すると共に、障害物情報として先行車両、対向車両、歩行者、電柱、標識、樹木等を抽出し、これらの対象物について自車両との距離、自車両に対する横位置及び縦位置などの位置情報を求める。
【0017】
例えば、車外情報認識部31は、撮像した画像から画像認識(エッジ抽出やパターン認識処理など)によって対象物を抽出する。そして、車外情報認識部31は、左右のステレオ画像における対象物の見え方のずれを利用して三角測量方式により自車両と対象物との距離を求める。また、車外情報認識部31は、検出した対象物の幅方向の両端部を検出し、自車両の進行方向と2つの端部の方向とのなす角度を求め、その角度から横位置を求める。同様に、車外情報認識部31は、検出した対象物の縦方向の両端部を検出し、自車両の進行方向と2つの端部の方向とのなす角度を求め、その角度から縦位置を求める。
【0018】
リスク分布作成部32は、認識した対象物、すなわち道路情報や障害物各々が自車両に対して及ぼす水平方向のリスクポテンシャル(潜在的な危険度)を演算する。そして、リスク分布作成部32は、対象物の位置情報及び求めた水平方向のリスクポテンシャルR,Rxに基づいて、水平方向のリスクポテンシャルの分布を俯瞰リスクマップとして作成する(図2(a))。
【0019】
高さ情報取得部33は、俯瞰リスクマップにおけるリスクポテンシャルR,Rxの高さ情報を取得する。例えば、高さ情報取得部33は、リスクポテンシャルR,Rxの高さ情報として、高さ方向のリスクポテンシャルの分布を取得する。具体的には、高さ情報取得部33は、認識した対象物、すなわち道路情報や障害物各々が自車両に対して及ぼす垂直方向のリスクポテンシャルを演算する。そして、高さ情報取得部33は、対象物の位置情報及び求めた垂直方向のリスクポテンシャルに基づいて、垂直方向のリスクポテンシャルの分布を高さ方向リスクマップとして作成する。
【0020】
走行可否判断部34は、リスクポテンシャルR,Rxの発生位置の走行可否を判断する。具体的には、走行可否判断部34は、高さ方向リスクマップに基づいて、リスクポテンシャルR,Rxの高さが自車両の車高に対して所定値以上である場合、そのリスクポテンシャルの発生位置は走行可能であると判断する。
【0021】
本実施形態では、まず、高さ情報取得部33によって、自車両の両端から障害物のリスクポテンシャルRxへ向けた領域であって、リスクポテンシャルRxの端に接する領域を、垂直方向のリスクポテンシャルの分布を取得する初期位置Aとして設定し(図2(a))、この初期位置Aの高さ方向リスクマップを作成する(図3)。そして、走行可否判断部34によって、初期位置Aの高さ方向リスクマップに基づいて、リスクポテンシャルRxの端位置の高さ、すなわち走行可否を判断する。
【0022】
そして、リスクポテンシャルRxの端位置の下が走行可能である場合には、高さ情報取得部33によって、高さ情報取得位置をリスクポテンシャルRx側へ所定量だけ移動して、再び高さ方向リスクマップを作成し、走行可否判断部34によって、リスクポテンシャルRxの位置の高さ、すなわち走行可否の判断を行う。これらの処理を、高さ方向リスクマップにおけるリスクポテンシャルRxの下が走行不可になるまで、又は、リスクポテンシャルRxの下は走行可能であるが道路側方のリスクポテンシャルRに達するまで(図2(b))、繰り返すことにより、リスクポテンシャルRxの発生位置の走行可否を判断することが可能となる。
【0023】
走行経路作成部35は、リスクポテンシャルRxの発生位置が走行可能である場合には、リスクポテンシャルRxの発生位置に走行経路Lを作成する(図2(b))。一方、リスクポテンシャルRxの発生位置が走行不可である場合には、俯瞰リスクマップに基づいてリスクポテンシャルRxを回避する走行経路を作成する。
【0024】
走行支援部36は、車両センサ10によって検出された各種情報に基づいて、スロットルアクチュエータやブレーキアクチュエータなどの各種アクチュエータ40を制御して、走行経路に沿って走行するためのアシスト走行制御を行う。又は、走行支援部36は、ディスプレイによる画像表示報知や、スピーカ又はブザー等による音声報知などを行う報知部50を制御して、ドライバが走行経路に沿って走行するように誘導するためのアシスト制御を行う。
【0025】
次に、第1の実施形態の走行支援装置1の動作を説明する。図4は、第1の実施形態の走行支援装置による走行支援処理を示すフローチャートである。
【0026】
まず、車外情報認識部31によって、ステレオカメラ20からの画像信号に基づいて、自車両周辺の道路情報として白線、ガードレール、縁石等を認識し、これらの対象物について自車両との距離、自車両に対する横位置及び縦位置などの位置情報を求める(ステップS01)。また、車外情報認識部31によって、ステレオカメラ20からの画像信号に基づいて、自車両周辺の障害物情報として先行車両、対向車両、歩行者、電柱、標識、樹木等を認識し、これらの対象物について自車両との距離、自車両に対する横位置及び縦位置などの位置情報を求める(ステップS02)。
【0027】
次に、リスク分布作成部32によって、認識した道路情報や障害物各々が自車両に対して及ぼす水平方向のリスクポテンシャルを演算し、求めた水平方向のリスクポテンシャル及び道路情報や障害物の位置情報に基づいて、水平方向のリスクポテンシャルの分布を俯瞰リスクマップとして作成する(図2(a))(ステップS03)。
【0028】
次に、高さ情報取得部33によって、垂直方向のリスクポテンシャルの分布を取得する初期位置Aを設定し(図2(a))(ステップS04)、この初期位置Aの高さ方向リスクマップを作成する(図3)(ステップS05)。次に、初期位置Aの高さ方向リスクマップに基づいて、走行可否判断部34によって、リスクポテンシャルRxの端位置の走行可否を判断する(ステップS06)。
【0029】
リスクポテンシャルRxの端位置が走行可能である場合には、高さ情報取得部33によって、高さ情報取得位置をリスクポテンシャルRx側へ所定量だけ移動して(ステップS07)、再び高さ方向リスクマップを作成し、走行可否判断部34によって走行可否の判断を行う。これらの処理を、高さ方向リスクマップにおけるリスクポテンシャルRxの下が走行不可になるまで、又は、リスクポテンシャルRxの下は走行可能であるが道路側方のリスクポテンシャルRに達するまで(図2(b))、繰り返すことにより、リスクポテンシャルRxの発生位置の走行可否を判断することが可能となる。
【0030】
次に、走行経路作成部35によって、リスクポテンシャルRxの発生位置が走行可能である場合には、リスクポテンシャルRxの発生位置に走行経路Lを作成し(図2(b))、リスクポテンシャルRxの発生位置が走行不可である場合には、俯瞰リスクマップに基づいてリスクポテンシャルRxを回避する走行経路を作成する(ステップS08)。そして、この走行経路に基づいて、走行支援部36によってシスト制御が実行される(ステップS09)。
【0031】
このように、第1の実施形態の走行支援装置1によれば、俯瞰リスクマップにおけるリスクポテンシャルの高さ情報を取得して、リスクポテンシャルの発生位置の走行可否を判断し、リスクポテンシャルの発生位置が走行可能である場合にはリスクポテンシャルの発生位置を自車両の走行経路とするので、水平方向のリスクポテンシャルと認識された障害物が道路にせり出した樹木等であり、自車両の走行に影響を与えない場合における不必要な走行支援を抑制することが可能となる。
[第2の実施形態]
【0032】
図5は、本発明の第2の実施形態に係る走行支援装置の構成を示す図である。図5に示す第2の実施形態の走行支援装置1Aは、ECU30に代えてECU30Aを備えている構成で第1の実施形態の走行支援装置1と異なっている。走行支援装置1Aのその他の構成は、走行支援装置1と同一である。
【0033】
ECU30Aは、高さ情報取得部33、走行可否判断部34、走行経路作成部35に代えて高さ情報取得部33A、走行可否判断部34A、走行経路作成部35Aを備えている構成でECU30と異なっている。ECU30Aのその他の構成は、ECU30と同一である。
【0034】
高さ情報取得部33Aは、自車両の左右両側部から走行車線に沿って車両進行方向へ向けた2つの領域を、垂直方向のリスクポテンシャルの分布を取得する位置A,Bとして設定し(図6)、これらの位置A,Bの高さ方向リスクマップを作成する点で、高さ情報取得部33とは異なる。そして、走行可否判断部34Aは、これらの位置A,Bの高さ方向リスクマップに基づいて、リスクポテンシャルRxの位置A,Bの高さ、すなわち走行可否を判断する。
【0035】
走行経路作成部35Aは、リスクポテンシャルRxの位置A,Bが走行可能である場合には、リスクポテンシャルRxにおける位置A,Bの間の中心位置に走行経路Lを作成する点で、走行経路作成部35とは異なる(図6)。
【0036】
次に、第2の実施形態の走行支援装置1Aの動作を説明する。図7は、第2の実施形態の走行支援装置による走行支援処理を示すフローチャートである。
【0037】
まず、上記同様ように、ステップS01〜S03までの処理が行われる。
【0038】
次に、高さ情報取得部33Aによって、垂直方向のリスクポテンシャルの分布を取得する2つの位置A,Bを設定し(図6)(ステップS04A)、これらの位置A,Bの高さ方向リスクマップを作成する(ステップS05A)。次に、位置A,Bの高さ方向リスクマップに基づいて、走行可否判断部34Aによって、リスクポテンシャルRxの位置A,B
の走行可否を判断する(ステップS06A)。
【0039】
次に、走行経路作成部35Aによって、リスクポテンシャルRxの位置A,Bが走行可能である場合には、リスクポテンシャルRxにおける位置A,Bの間の中心位置に走行経路Lを作成し(図6)(ステップS08A−1)、リスクポテンシャルRxの位置A,Bが走行不可である場合には、俯瞰リスクマップに基づいてリスクポテンシャルRxを回避する走行経路を作成する(ステップS08A−2)。そして、この走行経路に基づいて、走行支援部36によってシスト制御が実行される(ステップS09)。
【0040】
この第2の実施形態の走行支援装置1Aでも、俯瞰リスクマップにおけるリスクポテンシャルの高さ情報を取得して、リスクポテンシャルの発生位置の走行可否を判断し、リスクポテンシャルの発生位置が走行可能である場合にはリスクポテンシャルの発生位置を自車両の走行経路とするので、水平方向のリスクポテンシャルと認識された障害物が道路にせり出した樹木等であり、自車両の走行に影響を与えない場合における不必要な走行支援を抑制することが可能となる。
【0041】
なお、本発明は上記した本実施形態に限定されることなく種々の変形が可能である。例えば、本実施形態では、自車両周辺の道路情報及び障害物情報を認識するためにステレオカメラを用いたが、単眼画像カメラや、ミリ波レーダ、電波センサ、レーザレーダなど様々なセンサを用いてもよい。
【符号の説明】
【0042】
1,1A…走行支援装置、10…車両センサ、20…ステレオカメラ、30…ECU、31…車外情報認識部(車外情報認識手段)、32…リスク分布作成部(リスク分布作成手段)、33,33A…情報取得部(情報取得手段)、34,34A…走行可否判断部(走行可否判断手段)、35,35A…走行経路作成部(走行経路作成手段)、36…走行支援部、40…各種アクチュエータ、50…報知部。
【特許請求の範囲】
【請求項1】
自車両の周辺状況に応じて走行経路を作成し、当該走行経路に基づいて自車両の走行支援を行う走行支援装置において、
自車両周辺の対象物の情報を認識する車外情報認識手段と、
自車両に対して前記対象物各々が及ぼす水平方向のリスクポテンシャルの分布を作成するリスク分布作成手段と、
前記水平方向のリスクポテンシャルの分布におけるリスクポテンシャルの高さ情報を取得する高さ情報取得手段と、
前記リスクポテンシャルの高さ情報が自車両の車高に対して所定値以上である場合、前記リスクポテンシャルの発生位置は走行可能であると判断する走行可否判断手段と、
前記水平方向のリスクポテンシャルの分布に基づいて自車両の前記走行経路を作成する走行経路作成手段であって、前記リスクポテンシャルの発生位置が走行可能である場合には、前記リスクポテンシャルの発生位置を自車両の前記走行経路とする当該走行経路作成手段と、
を備える、走行支援装置。
【請求項1】
自車両の周辺状況に応じて走行経路を作成し、当該走行経路に基づいて自車両の走行支援を行う走行支援装置において、
自車両周辺の対象物の情報を認識する車外情報認識手段と、
自車両に対して前記対象物各々が及ぼす水平方向のリスクポテンシャルの分布を作成するリスク分布作成手段と、
前記水平方向のリスクポテンシャルの分布におけるリスクポテンシャルの高さ情報を取得する高さ情報取得手段と、
前記リスクポテンシャルの高さ情報が自車両の車高に対して所定値以上である場合、前記リスクポテンシャルの発生位置は走行可能であると判断する走行可否判断手段と、
前記水平方向のリスクポテンシャルの分布に基づいて自車両の前記走行経路を作成する走行経路作成手段であって、前記リスクポテンシャルの発生位置が走行可能である場合には、前記リスクポテンシャルの発生位置を自車両の前記走行経路とする当該走行経路作成手段と、
を備える、走行支援装置。
【図1】


【図2】
【図3】
【図4】
【図5】

【図6】
【図7】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2011−186630(P2011−186630A)
【公開日】平成23年9月22日(2011.9.22)
【国際特許分類】
【出願番号】特願2010−49400(P2010−49400)
【出願日】平成22年3月5日(2010.3.5)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成23年9月22日(2011.9.22)
【国際特許分類】
【出願日】平成22年3月5日(2010.3.5)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]