
Fターム[5H180FF27]の内容
交通制御システム (133,182) | 個別車両の運行・走行の管理 (59,670) | 位置・経路の誘導・案内指示装置 (32,912) | 車載のもの (8,483)
Fターム[5H180FF27]に分類される特許
1 - 20 / 8,483
駐車支援装置
【課題】運転者が自車両の切り返しの有無を含めた駐車の可否や難易度を直感的に判断することができる駐車支援装置を提供する。
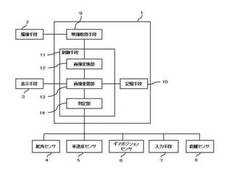
【解決手段】少なくとも自車両後方の撮像映像を取得する映像取得手段9と、この映像取得手段9が取得した撮像映像に自車両の駐車目安枠を重畳して合成映像を表示手段3に出力する画像重畳部13とを備え、画像重畳部13に重畳される自車両の駐車目安枠は、駐車可能な限界領域を示す第1の目安枠と、この第1の目安枠から自車両の進行方向側に延出して駐車の際に自車両の切り返しが必要な領域を示す第2の目安枠とを有することを特徴とする。
(もっと読む)
標識認識装置及び標識認識方法

【課題】 標識認識を効率よく行うことのできる標識認識装置を提供する。
【解決手段】 車両に搭載されて標識を認識する標識認識装置1は、車両の前方を撮影して画像を取得するカメラ10と、カメラ10にて得られた画像内の標識存在認識エリアEAにおいて、標識存在認識(第1の認識レベルでの標識認識)を行う標識存在認識部31と、カメラ10にて得られた画像内の標識存在認識エリアEAとは異なる標識内容認識エリアCAにおいて、標識内容認識(第1の認識レベルより高い第2の認識レベルでの標識認識)を行う標識内容認識部33を備える。これにより、複数の認識エリアEA,CAについて、それぞれ異なる認識レベルで標識を認識するので、画像内で高い認識レベルが必要とされない部分の認識レベルを落とすことで、全体として標識認識の効率を向上できる。
(もっと読む)
地図表示装置
【課題】アイコンの表示数を変更して視認性を残しつつ利便性の良好な地図表示装置を得る。
【解決手段】自車の現在位置を求める自車位置特定手段2と、地図情報を記録した地図DB7と、地図データフィルタリング手段5と、地図表示手段4とを備える。地図データフィルタリング手段5は、現在位置と地図情報とを基に、走行中又は走行予定となる特定の道路と施設との距離を計算し、計算の結果が所定値以下となる施設を選択するフィルタリングモードを有する。地図表示手段4は、地図データフィルタリング手段5で選択された施設のアイコンを地図上に表示する。
(もっと読む)
巡回車両の到着時間予測システム
【課題】複数の利用者宅を巡回する車両の各利用者宅への到着時間を精度良く予測する。
【解決手段】予め定めた巡回車両30の巡回ルートについて、夫々の利用者宅20間の標準とする所用運行時間および夫々の利用者宅での標準とする停車時間を情報処理装置100に設定して各利用者宅への到着時間を予測するとともに、利用者の当日の状態情報および巡回車両の位置情報と時間に基づき当日の利用者宅への巡回車両の到着予定時間を修正する。
(もっと読む)
走行道路推定システム
【課題】車両がこれから走行する可能性のある道路を推定する精度を向上させ、現在位置を道路データ上に同定するマップマッチング処理及び車両制御や情報通知を適切に行う。
【解決手段】車両ナビゲーション装置1は、現在位置が同定された道路データに対応する道路である推定基準道路に接続している道路毎に車速や信号機の状態や走行レーンの状態等に基づいて車両が走行可能であるか否かを判定し、車両が走行不可能であると判定した道路を推定対象から除外し、車両が走行可能であると判定した道路だけを推定対象として車両がこれから走行する可能性のある道路だけを推定走行道路として推定する。
(もっと読む)
走行支援装置、走行支援方法、及びプログラム
【課題】始点と終点をつなぐ道路が曲率の変化が小さい区間と曲率の変化が大きい区間の双方を含んでいても、高い精度で走行軌跡を算出することができるようにする。
【解決手段】区間分割部120は、道路情報に基づいて、道路情報取得部100が取得した道路情報を、曲率が基準値以上であるカーブ・右左折区間であることを示すカーブ・右左折区間情報と、曲率が基準値未満である直進区間であることを示す直進区間情報と、に分割する。直進軌跡算出部140は、直進区間における走行軌跡である直進区間軌跡を算出する。カーブ・右左折区間軌跡算出部160は、カーブ・右左折区間における走行軌跡であるカーブ・右左折区間軌跡を、直進区間軌跡とは異なる方法で算出する。軌跡結合部180は、カーブ・右左折区間軌跡と、直進区間軌跡とを結合することにより、始点と終点をつなぐ道路の全域における走行軌跡を定義する。
(もっと読む)
車載用ナビゲーション装置及び交通情報表示方法
【課題】TMC情報を受信して渋滞情報を高速に表示することが可能な「車載用ナビゲーション装置及び交通情報表示方法」を提供すること。
【解決手段】車載用ナビゲーション装置は、表示手段と、交通情報をTMC放送により受信する通信手段と、交通情報及び道路を複数のTMCリンクに抽象化したネットワーク情報を格納する交通情報記憶手段と、通信手段を介して取得した交通情報を基に渋滞区間を検出する制御手段と、を有する。制御手段は、複数のTMCリンクのうち、ソートされていないTMCリンクを抽出してソートするとともに予めソートされているTMCリンクと結合し、渋滞区間を示すTMCリンクを他のTMCリンクとは異なる態様で表示手段の画面に表示させる。制御手段はTMCリンクのうち一列に接続可能なTMCリンクを抽出してソートするとともに、ソート済みTMCリンクであることを示す識別情報を付与する。
(もっと読む)
車両間隔管理装置、車両間隔管理方法および車両間隔管理プログラム
【課題】車間距離に対する運転評価を実現することを課題とする。
【解決手段】車両間隔管理装置10は、記憶部11と、選択部12と、取得部13と、判断部14とを有する。記憶部11は、車両の速度と、サイズの異なるテンプレートとを対応づけたデータテーブルを記憶する。選択部12は、記憶部11に記憶されたデータテーブルに基づき、運転中の車両の速度に対応したサイズのテンプレートを選択する。取得部13は、運転中の車両の前方を走行中の車両のナンバープレートの画像を取得する。判断部14は、選択部11により選択されたテンプレートと、取得部13により取得されたナンバープレートの画像とに基づき、運転中の車両と、運転中の車両の前方を走行中の車両との車間距離の適否を判断する。
(もっと読む)
省燃費運転評価装置及び省燃費運転評価プログラム
【課題】エアコンディショナの使用状況に基づく省燃費運転評価を行うに際して、運転の安全性を高めるための必要性を考慮した適切な評価を行うことができる省燃費運転評価装置等を提供する。
【解決手段】エアコンディショナ11の使用可能期間に占めるエアコン使用期間の割合であるエアコン使用割合に応じて、当該エアコン使用割合が低くなるに従って省燃費運転に関する評価を高くするように省燃費運転評価値を算出する評価手段2と、エアコンディショナの機能の一つであるデフォッガーが使用中であるか否かの判定を行うデフォッガー使用判定手段3と、デフォッガーが使用中であると判定された場合には、当該デフォッガーの使用に伴うエアコン使用期間の増加による前記評価の低下を抑制するように省燃費運転評価値を補正する補正手段4と、を備える。
(もっと読む)
車両経路案内装置
【課題】電力消費地域の供給電力の過不足を緩和する車両経路案内装置を提供する。
【解決手段】車両経路案内装置においては、ECUにより、電力余剰地域で車両の車載バッテリーの充電をおこなう経路、電力不足地域で車両の車載バッテリーの放電をおこなう経路、電力余剰地域で車両の車載バッテリーの充電をおこなうとともに電力不足地域で車両の車載バッテリーの放電をおこなう経路のいずれかの経路で車両10を案内することで、車載バッテリーへの充電により車両が電力余剰地域から電力を受け取り、車載バッテリーからの放電により車両が電力不足地域へ電力を提供する。そのため、電力線網の状況によらずに、車両の車載バッテリーを利用して、複数地区の間の供給電力の過不足を緩和することができる。
(もっと読む)
車両逆走検出装置
【課題】自車両の位置情報に誤差が含まれる場合において、運転手に対し誤って警告情報を報知する可能性を低減する。
【解決手段】一方通行の道路を自車両Vが走行しているときに自車両Vが道路の分岐点P11に近づいた場合、分岐点P11から延びる道路L11〜L14に道路領域R11〜R14を作成する。分岐点P11に流入する道路であって、自車両Vがいない道路L12には、車両の通行が禁止されている方向に走行していたら逆走していることを報知する道路領域である即時有効判定エリアを作成する。自車両Vが存在し、分岐点P11に流入する道路L11と、分岐点P11から流出する道路L13およびL14とには、自車両Vが通過した後に即時有効判定エリアに変化する通過待ち判定エリアR11、R13、およびR14を作成する。
(もっと読む)
運転支援装置及びプログラム
【課題】他の走行体視点の状況も考慮した精度の高い衝突判定を行う。
【解決手段】環境認識部32で、レーザレーダ12、撮像装置14、GPS装置16、車両センサ18の各データ、及び地図情報を用いて、自車両の現在の状況及び自車両を基準とした他の走行体の状況を示す自車両ベクトルと、他の走行体の現在の状況及び他の走行体を基準とした自車両及びその他の他の走行体の状況を示す走行体ベクトルを算出する。行動予測部40で、算出された自車両ベクトル及び走行体ベクトルと、変化モデル記憶部38に記憶された自車両及び他の走行体の行動状態の変化を予測するための自車両変化モデル及び走行体変化モデルとを照合して、自車両及び他の走行体の行動状態の変化を予測し、衝突判定部42で、予測結果に基づいて、自車両と他の走行体との相対距離を算出して、自車両と他の走行体との衝突の可能性を判定する。
(もっと読む)
車載端末および車車間通信システム
【課題】車両のユーザが車車間通信システムの通信エリアを認識できるようにするための技術を提供する。
【解決手段】自車両の位置データを取得する位置データ取得部と、他の車両と通信を行い、当該他の車両の位置データを取得する通信部と、前記通信部が他の車両と通信可能な範囲である通信エリアを取得する通信エリア取得部と、取得した他の車両の位置データおよび通信エリアを、地図上に重ね合わせて表示する表示部とを有する車載端末を用いる。
(もっと読む)
車載白線認識装置
【課題】横断歩道や複合線が存在しても、白線を正しく認識できる車載白線認識装置を提供すること。
【解決手段】車両周囲の画像を取得する車載カメラ10と、車載カメラ10で取得した画像から画像処理により白線候補を抽出する白線候補抽出手段30と、白線候補の白線らしさの確信度を算出する確信度算出手段40と、確信度算出手段40が算出した確信度に基づき、認識する白線を選択する白線選択手段50、60と、車載カメラ10で取得した画像から画像処理により複合線を検出する複合線検出手段40と、車載カメラ10で取得した画像のうち、複合線検出手段40により検出した複合線を除外した領域において、画像処理により横断歩道を検出する横断歩道検出手段120とを備え、確信度算出手段40は、白線候補が横断歩道検出手段120により検出した横断歩道に属する場合、それ以外の場合よりも、その白線候補の確信度を低くすることを特徴とする車載白線認識装置1。
(もっと読む)
リンク列変換方法、道路情報提供装置および道路情報提供システム
【課題】異なる地図データを利用する端末装置に交通情報や経路情報などの道路情報を提供する道路情報提供装置において、提供された道路情報を端末装置の地図上に正しく再現するために、端末装置において道路区間を特定する際のリンク変換処理負荷を軽減する。
【解決手段】道路情報装置において、地点座標列で表された道路リンク列を、指定された地図データの道路リンク列に対応する処理を実行する。これにより対応付けられなかった地点座標列を記録し、記録された地点座標列を組み合わせて新たな地点座標列を作る。この新たな地点座標列で前記地図データの道路リンク列に対応付ける処理を繰り返した結果、道路リンク変換手段として、デコードテーブル902を生成する。道路情報提供装置は、デコードテーブル902を用いた道路リンク変換により端末地図データへ対応付けた道路情報を、端末装置に配信する。
(もっと読む)
携帯端末、警告報知方法およびプログラム
【課題】ユーザが乗車する車両を問わず事故やトラブルを未然に防止する警告機能を利用できる携帯端末、警告報知方法およびプログラムを提供する。
【解決手段】携帯端末1が警告モードを開始すると、GPS受信部13が受信した測位情報に基づいて、判定部14が携帯端末1の位置に関する物理量を算出し、算出した物理量と記憶部12が記憶する所定の閾値とを比較して警告を行うか否かを判定する。たとえば、典型的な物理量としては、速度や移動距離がある。判定部13が警告を行うと判定した場合に、鳴動部15および/または表示部16が警告を出力する。
(もっと読む)
道路交通情報提供システム及び方法
【課題】道路上を移動している車両に対して、することができる道路交通情報提供システムを実現することにある。
【解決手段】道路交通情報提供システム10は、道路上を走行する車両30に搭載された車載装置31との間で無線通信により情報の交換を行なう複数の路側装置20及びサーバ12を有する。サーバ12は、各路側装置20を介して収集した車両の移動速度に基づいて、配信する道路交通情報の伝送データを分割して各路側装置20に割り当てる。
(もっと読む)
白線検出装置
【課題】本発明は、白線のエッジ抽出の際の閾値の決定手段(適応制御的なもの)を不要とし、処理を簡素化して、白線両端に生じるエッジのうちの右側を信頼性高く抽出する手法を提供することを目的としている。
【解決手段】このため、走査線方向に隣り合う2つの画素の輝度の差分を算出する差分算出手段と、差分算出手段の差分が予め設定された閾値以上か否かを判定する閾値判定手段と、閾値判定手段で差分が閾値以上と判定された第1の画素から、白線の幅分と定めた画素数だけ走査線方向にずれた位置に、閾値判定手段で差分が閾値以上と判定された第2の画素が存在するか否かを判定する白線幅判定手段とを備え、白線幅判定手段で第2の画素が存在すると判定された場合に、第1の画素あるいは第2の画素を白線のエッジとする。
(もっと読む)
車両用運転支援装置
【課題】駐車区域において、進入路および退出路のうちの少なくともいずれかを走行している場合に限って逆走の警告を行うことを、より容易に可能にする車両用運転支援装置を提供する。
【解決手段】マップマッチング処理でマッチングした場所が、SAPA内の道路に該当していた場合に、位置検出器11で検出した自車両の現在位置をもとに、自車両が走行中の可能性があるSAPAセグメントを取得する。そして、当該SAPAセグメントのネットワークを前後に辿り、探索距離内に本線セグメントが存在するか否かを判定し、探索距離内に本線セグメントが存在すると判定したこと、および位置検出器11で検出した自車両の進行方向に基づいて、自車両が逆走状態であることを判断し、逆走の警告を行う。
(もっと読む)
車載機
【課題】路上機と車両との相対位置を精度良く求めることができる車載機を、サイズアップ及びコストアップを抑制して提供する。
【解決手段】車載機の運転支援部は、車線通知データを所得した時点での車両の位置を仮基準位置RDとし、仮基準位置RDから、車線通知データの送受信部からの転送時間に車両の走行速度を乗じた第1期間距離D1と、車線通知データの光ビーコンから送受信部までの伝達時間に車両の走行速度を乗じた第2期間距離D2と、前記道路情報データから認識されるDLゾーン内の起点位置SNから車線通知データの送信を開始した時点での位置までの距離を示すアップロード補正距離CULとの加算距離分だけ離れた位置を、距離の起点位置SNとして求める。
(もっと読む)
1 - 20 / 8,483
[ Back to top ]