
Fターム[5H180FF27]の内容
交通制御システム (133,182) | 個別車両の運行・走行の管理 (59,670) | 位置・経路の誘導・案内指示装置 (32,912) | 車載のもの (8,483)
Fターム[5H180FF27]に分類される特許
161 - 180 / 8,483
情報提示装置
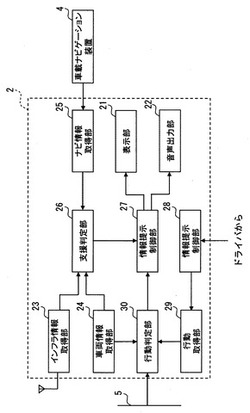
【課題】精度がより高く、且つ、実施がより容易であるとともに、コスト的な無駄をより抑えることを可能にしながらも、ドライバにとっての快適性をより損ないにくい情報提示装置を提供する。
【解決手段】注意喚起表示や警告表示にドライバが気づいたか否かの判定を行う行動判定部30を備え、情報提示制御部27は、行動判定部30で肯定判定を行ったことをもとに、注意喚起表示や警告表示の減衰表示への変化を表示部21に行わせ、行動判定部30は、表示部21に表示された注意喚起表示や警告表示にドライバが気づいた場合にドライバが行うスイッチ操作や運転操作によって生じる信号であるドライバ行動確認情報や車両情報をもとに上述の判定を行う。
(もっと読む)
経路作成装置

【課題】走行経路の作成時間を短縮すること。
【解決手段】経路作成装置1は、ノードを繋ぐ線分を順次接続することにより開始点から目標点までの車両の走行経路を作成する装置である。この経路作成装置1は、空間上からランダムに抽出した点を基準に新たなノードを設定する処理を、目標点から所定の範囲内にノードが設定されるまで繰り返し実行し、設定されたノードを繋ぐ線分を順次接続することにより走行経路を作成する作成部16bと、車両の状況又は該車両の周辺の状況を検出する手段(障害物検出装置11や白線検出装置12など)と、検出された状況に基づいて、目標点をランダムに抽出した点とする確率を決定する確率決定部16aと、を備えることを特徴とする。
(もっと読む)
画像判定装置、画像判定方法および画像判定プログラム
【課題】開閉する可動部に応じて方向及び位置が変わる撮像部が適切な位置および方向となっているか否かを効率的かつ正確に判定すること。
【解決手段】画像判定装置10の記憶部13が、撮像部12により可動部11の開状態で撮影された画像データに含まれる開状態の特徴をなす第1の部分画像データ13aを記憶する。また、記憶部13は、撮像部12により可動部11の閉状態で撮影された画像データに含まれる閉状態の特徴をなす第2の部分画像データ13bを記憶する。そして、判定部14が、記憶部13に記憶された第1の部分画像データ13a及び第2の部分画像データ13bを用いて、判定対象画像データが閉状態で撮影された画像データであるか否かを判定する。
(もっと読む)
運転支援装置
【課題】衝突可能性がある他車両の接近に対して注意喚起を行なう運転支援装置において、ドライバに最適なタイミングで注意喚起が行なえるようにする。
【解決手段】検出部14により、衝突可能性があって自車両1に接近する他車両21、23のヒヤリハットの発生を検出し、この検出に基づき、衝突可能性があって自車両1に接近する他車両21、23のヒヤリハットの発生状況から学習し、実際に注意喚起のタイミングの補正が必要なときにのみ、注意喚起処理部8により、記憶部9の注意喚起のタイミングを自動的に的確に自車両1のドライバの運転行動の特性に応じた最適なタイミング補正し、次回の注意喚起のタイミングに、記憶部9の補正されたタイミングで表示部10、スピーカ11によって注意喚起を行なう。
(もっと読む)
車両の走行安全装置
【課題】見通しの悪い交差点等において、運転者が前方の安全を確認しようとしている場合に、運転者に衝突の可能性のある移動物体の存在を知らせる。
【解決手段】車両の走行安全装置は、車両に設けられ、該車両の周辺の物体を検出する物体検出手段と、車両の走行状態を検出するための走行状態検出手段と、検出された物体のうち、車両の進行経路に接近してくる移動物体を特定する移動物体特定手段と、運転者の前方への乗り出しの有無を判定する乗り出し判定手段と、接近してくる移動物体があり、かつ運転者が前方へ乗り出しているときに、運転者に移動物体の接近を知らせる報知手段と、を備える。
(もっと読む)
ナビゲーション装置及びレーン変更案内方法
【課題】レーン変更先の走行レーンにおける車両走行速度と自車両の走行速度との差が大きい場合であっても、運転者が安全にレーン変更を行うことが可能な「ナビゲーション装置およびレーン変更案内方法」を提供する。
【解決手段】経路案内すべき交差点から自車位置までの間に複数のレーンがある道路が含まれている場合であって、かつ、複数の走行レーンのうち互いに隣り合う各組の隣接走行レーンの中に車両走行速度の差分が所定値以上となる隣接走行レーンが存在する場合、通常のタイミングよりも経路案内のタイミングを早くするように制御することにより、レーン変更先の走行レーンにおける車両走行速度に自車両の走行速度を合わせるための距離を長く確保できるようにする。
(もっと読む)
無線装置
【課題】運転者に、画面上の表示を容易に確認させる技術を提供する。
【解決手段】GPS受信部22は、車両の位置情報を取得する。処理部20、変復調部18、RF部16は、取得した位置情報が含まれたパケット信号を送信するとともに、他の車両に搭載された他の無線装置から、当該他の車両の位置情報が含まれたパケット信号を受信する。導出部28は、受信したパケット信号に含まれた位置情報と、取得した位置情報とをもとに、車両に対する他の車両の相対的な存在方向を導出する。表示制御部30は、導出した存在方向をディスプレイ24の縁近傍の一部分に表示させる。ここで、表示制御部30は、ディスプレイ24の縁近傍のうち、存在方向が表示される一部分の位置を存在方向に応じて変更する。
(もっと読む)
車両周辺監視装置
【課題】 赤外線カメラにより温度一様表面を有するデバイスを用いることなく、グレースケール画像中の対象物の輝度(輝度値)を推定することを可能とする車両周辺監視装置を提供する。
【解決手段】
予め求めておいた路面温度Trと外気温Taの対応関係の特性102に基づき検出した外気温Taから推定される路面温度Trと、この路面温度Trに対応するグレースケール画像中の路面領域の輝度(路面輝度という。)との対応関係から、グレースケール画像中の対象物の輝度(輝度値)を推定する。
(もっと読む)
標識および標識使用方法
【課題】標識を画像処理することによって位置および方向に関する情報を得る。
【解決手段】所定箇所に設置される標識2は、軸部4と符号提示部6とを備える。球形の符号提示部6はその球面6aに、異なる複数の視線方向から識別可能な、標識2の位置を示す複数の位置情報符号と、異なる複数の視線方向のうちいずれの視線方向から標識2が視認されているかを示す方向表示と、を有する。複数の位置情報符号は方向表示を兼ねるよう配置されている。つまり、方向表示は複数の位置情報符号8の視認の態様に依存する形で定められる。
(もっと読む)
車両周囲表示装置、車両周囲表示方法
【課題】 従来、車載装置において、車両の周囲を画像として表示するとともに、コーナーセンサー等により障害物の存在を検知して、車両の周囲の画像上に当該コーナーセンサーが障害物を検知した旨の表示を行う技術がある。しかし、そのような技術では、障害物が付近に存在することを示すことはできるが、運転者は障害物の具体的な形状をイメージし難い。
本発明の目的は、運転者に車両の周囲の立体物の配置状況をよりわかりやすく示す技術を提供することにある。
【解決手段】
本発明の車両周囲表示装置は、車両の周囲を撮像するとともに車両の周囲に存在する立体物の高さを検知して、立体物の高さが車両にとって危険な高さにある場合に、画像に含まれる危険な障害物を特徴付けて表示する。
(もっと読む)
車載装置
【課題】一方通行の道路において法令等により禁止されている方向にする車両の走行を適当に防ぎつつ、記憶容量の増加を極力抑えることができる車載装置を提供する。
【解決手段】車載装置1は、車両の現在地近傍にある一方通行の道路を抽出し、抽出された一方通行の道路において通行が許可されている方向を地図データの中から検索する。そして、その検索により得られた通行が許可されている方向に基づいて、車載装置1は車両が走行すべき方向を決定する。車載装置1は、その車両が走行すべき方向と現在車両が走行している方向とを比較し、その二方向が一方通行の道路を異なる方向であるかどうかを判定する。二方向が異なる方向であると判定されたとき、車載装置1は音や画像を用いた報知を行い、運転手に警告を行う。
(もっと読む)
運転支援装置、運転支援方法および運転支援プログラム
【課題】 自車前方に存在する走行規制に対し注意を喚起する「運転支援装置、運転支援方法および運転支援プログラム」を提供する。
【解決手段】 本発明の運転支援装置は、自車Mが走行している道路前方に存在する一時停止60、62に関する情報を配信装置30からの無線により受信する受信手段と、自車前方を撮像する撮像カメラと、撮像データに基づき自車前方の視界の良否を判定する判定手段と、自車前方の視界が不良であると判定されたとき、一時停止が存在することを知らせる警報を提示する提示手段とを有する。
(もっと読む)
カメラ撮影画像表示装置
【課題】車外を撮影するカメラの画像をモニタに表示するに際して、カメラの撮影画像の表示と非表示が頻繁に切り換わることがないようにし、しかも車両が走行する道路の属性に応じて適切な表示と非表示がなされると共に、車両の走行環境等によっても適切な表示と非表示を行う「カメラ撮影画像表示装置」とする。
【解決手段】走行する道路の属性に対応してカメラ画像の表示標準閾値と非表示標準閾値を設定し、車両が走行する道路形状等の走行環境に対応して、表示標準閾値と非表示標準閾値とを調整するための調整値を設定して、これらの値により表示作動閾値と非表示作動閾値とを設定する。車速が非表示作動閾値よりも低い状態から高くなったときカメラの画像の表示を非表示とし、作動閾値よりも高い状態から低くなったとき、カメラの撮影画像を表示することにより、各閾値間にヒステリシス域を設けて頻繁な表示切り換えを防ぐ。
(もっと読む)
自律走行車および自律走行方法
【課題】飛行体と連携して走行先の死角を無くし、走行できる自律走行車を提供する。
【解決手段】飛行体12が自律走行車11を観測することにより得られた自律走行車11の走行履歴と飛行体12が自律走行車11の周辺を観測することにより得られた第1の観測区画毎の自律走行車11の走行可否と第1の観測区画毎の座標とを受信する受信手段と、自車両の位置の履歴を記憶する走行履歴作成手段と、自車両の周辺を観測し、第2の観測区画毎に物体の存在有無を判定する走行可否作成手段と、飛行体12から受信した走行履歴と、走行履歴作成手段により作成された走行履歴とから座標変換行列を算出し、座標変換行列を用いて飛行体12から受信した座標を座標変換し、飛行体12から受信した走行可否と、走行可否作成手段により作成された走行可否とに基づいて、第2の観測区画毎に走行可否を算出する計算手段と、を備える。
(もっと読む)
ナビゲーション装置
【課題】運転開始時のサポート機能を簡易に具備したナビゲーション装置を提供する。
【解決手段】地図を用いて車両の位置を検出する制御部を備え、この制御部は、飲酒の可能性がある地域に所定時間以上、停車したことを検出したら(ステップS1〜S5)、運転開始時に警告処理を行う(ステップS6)。
(もっと読む)
通信端末装置
【課題】本発明は、パケット通信に利用可能な空きスロットが無い場合でもパケット通信に利用するスロットを決定することを目的とする。
【解決手段】本発明は、自車両Aに搭載された通信端末装置1の車車間通信情報処理部11が、パケット通信に利用できるFREEスロットが無いと判定した場合、GPSアンテナ2aが取得した位置情報、受信状態信号解析部8がして得られた周囲の車両の位置情報に基づいて、自車両Aの後方にある車両Dと車両Eのスロットの利用状況を重み付けしてパケット通信に利用するスロットを決定することを特徴とする。
(もっと読む)
駐車場位置判定装置、駐車場位置判定方法、及びプログラム
【課題】施設に対する駐車場の位置を提示するための情報を蓄積すること。
【解決手段】駐車場位置判定装置は、車両の乗車者の識別情報及び前記車両の駐車位置の位置情報を含む駐車情報を受信する駐車情報受信手段と、施設の識別情報及び前記施設の利用者の識別情報を含む入場情報を受信する入場情報受信手段と、前記乗車者の識別情報と前記利用者の識別情報とが一致する場合に、前記駐車情報に含まれる時刻情報が示す時刻又は前記駐車情報が受信された時刻と、前記入場情報に含まれる時刻情報が示す時刻又は前記時刻情報が受信された時刻との差分が所定時間内である場合は、前記位置情報を前記施設に対する駐車場の位置を示す情報として駐車場情報記憶手段に記録する記録手段とを有する。
(もっと読む)
車両情報提示装置
【課題】交差点を右折する場合や通過する場合に、ドライバが自らの目で視認して交通環境を確認して運転することを妨げることなく、ドライバが必要とするときに適切に必要な情報を提示して安全性を向上する。
【解決手段】情報処理部1は、自車両が抽出した交差点から設定距離以内の範囲にいる場合で、且つ、自車両が停止しており、且つ、ブレーキスイッチがONで、且つ、ドライバの交差点における車両の交通状況の画像の表示要求が確認された場合に、表示部7の表示領域にポップアップウインドウWを表示する。そして、ポップアップウインドウWを表示した後、アクセル操作が所定に行われた場合に、ポップアップウインドウWの表示を終了する。
(もっと読む)
ナビゲーションシステム
【課題】ナビゲーションシステムが案内する方向と案内標識が示す方向とが異なる場合にユーザの不安感を軽減することができるナビゲーションシステムを提供する。
【解決手段】ナビゲーション装置11は、地図情報と現在位置情報と目的地情報に基づいて設定した案内経路を、ディスプレイ16に表示して交差点における自車両の進行方向を案内する。そして、目的地方面に存在する地名を地名情報として取得し、案内標識の方面案内情報の中に地名情報が少なくとも1つ含まれると共に、地名情報に対応した方面案内情報が示す方向と案内経路に沿って案内する方向とが一致しない場合に、案内経路に沿った道筋の確認を可能ならしめる保証案内を行う。
(もっと読む)
運転支援装置
【課題】直前の先行車両が自車と無線通信が可能でなくとも、信号機の通過の可否を判定することが可能な運転支援装置を提供する。
【解決手段】運転支援装置10の通信車速度変動情報処理部45が、車車間通信処理装置24が無線通信により取得した前方通信車101の加速度a1と、推定した前方通信車101と自車102との間を走行する車間台数Nとに基づいて自車102の将来の速度Vを予測する。また、交差点通過可否判定部52は、信号情報処理部44が取得した青信号の点灯時間と、通信車速度変動情報処理部45が予測した自車102の将来の速度Vとに基づいて、青信号の点灯時間の経過前に自車102が交差点を通過可能か否かを判定する。このため、直前の車両が無線通信を行えない車両であっても、自車102の将来の速度を予測でき、自車102が交差点を通過可能か否かを判定できる。
(もっと読む)
161 - 180 / 8,483
[ Back to top ]