
Fターム[5H180FF27]の内容
交通制御システム (133,182) | 個別車両の運行・走行の管理 (59,670) | 位置・経路の誘導・案内指示装置 (32,912) | 車載のもの (8,483)
Fターム[5H180FF27]に分類される特許
221 - 240 / 8,483
運転支援表示装置
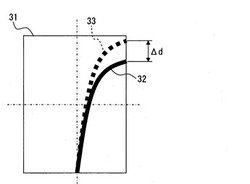
【課題】運転者にとって、現在車速が適正かどうかを余裕を持って確認でき、且つ、直感的に分かりやすい運転支援表示装置を提供する。
【解決手段】前方道路の形状、現在車速Vcurを逐次取得し、それらから理想走行軌跡32および予測走行軌跡33を逐次更新しつつ、車両走行中、常時、理想走行軌跡32と予測走行軌跡33とを表示器30に表示する。現在車速Vcurが前方のカーブを安全に走行するための理想的な速度である場合や、その理想的な速度をやや超えている程度であり、危険と判断するほどではない場合にも、理想走行軌跡32と予測走行軌跡33を表示器30に表示することになる。そのため、運転者は、運転操作に余裕のあるときに表示を確認することができる。また、現在車速Vcurが適正かどうかを理想走行軌跡と予測走行軌跡とのずれから判断することができるので、直感的に分かりやすい。
(もっと読む)
車両用運転支援装置

【課題】信号待ちで停車中の先行車が発進し、後続する車両が追従発進する場合であっても、現在の信号灯色が赤色或いは黄色の場合は、先行車発進報知は行わず、不必要な支援情報の提供を省略することで、運転者に与える煩雑感を軽減する。
【解決手段】信号灯色が赤色或いは黄色と判定され(S3)、且つ信号待ちの先行車が発進と判定され(S7)、且つ先行車が先頭車と判定された(S8)場合、運転者に対して先行車発進報知は行わない(S9)。一方この状態から自車両が発進しようとした場合は(S10)、信号灯色が赤色或いは黄色である旨の注意を促す支援情報を運転者に報知する(S12)。
(もっと読む)
移動無線通信装置及び携帯電話機
【課題】高い送受信性能を備えることができる移動無線通信装置を提供する。
【解決手段】所定の周波数帯の無線信号を受信可能な第一アンテナ30と、前記無線信号に基づいてITSのための情報処理を実行する装置制御部32とを有している。前記所定の周波数帯の無線信号を受信可能な第二アンテナ10を有している移動端末が着脱可能に接続される接続部34と、第一アンテナ30が受信した無線信号に基づいて装置制御部32が情報処理を実行する第一モードと、第一アンテナ30が受信した無線信号の他に第二アンテナ10が受信した無線信号も利用可能として装置制御部32が情報処理を実行する第二モードとの内のいずれか一方のモードに切り替える切り替え部32bとを備えている。
(もっと読む)
地図情報処理装置及びプログラム
【課題】 現在は未使用でも将来の使用可能性が高いエリアの地図情報をも更新できる。
【解決手段】 地図情報処理装置100は、ナビゲーション装置200からユーザID、走行履歴情報及び経路探索履歴情報を受信し、受信した走行履歴情報及び経路探索履歴情報とグループ走行エリアとの類似度を計算し、最高の類似度のグループ走行エリアをユーザ走行エリアとして決定し、各地図エリアのエリア座標とユーザ走行エリアとの距離に基づいてエリア重要度を計算し、各地図エリアの更新年月日と現在年月日とに基づいて更新期間重要度を計算し、受信したユーザIDから読み出したユーザ地図更新情報DB105内のエリア座標に対応する地図データの差分重要度を計算し、3つの重要度から総合重要度を計算し、総合重要度に基づいて更新優先順位を決定し、更新優先順位及びエリア座標に基づいて、地図DB102内の地図情報をナビゲーション装置200に送信する。
(もっと読む)
干渉回避装置及び移動通信機
【課題】路側通信機からの送信信号の干渉が発生していると、当該干渉を回避することが可能となる干渉回避装置を提供する。
【解決手段】第一の路側通信機2からの送信信号を車載通信機3が受信する際に、当該送信信号が第二の路側通信機2からの送信信号と干渉するのを回避させる干渉回避装置10である。干渉の有無を判定する干渉判定部13と、この干渉判定部13による判定結果に基づいて路側通信機2からの送信信号レベルの伝搬距離特性である距離−レベル特性を変更させる特性変更部14とを備えている。
(もっと読む)
車両走行制御装置及び車両走行制御方法
【課題】渋滞時における追従走行において、無駄な加減速を低減することが可能な車両走行制御装置及び車両走行制御方法を提供する。
【解決手段】渋滞先頭距離計測装置16が、渋滞先頭JHの位置からの自車両100の先行車200Pの位置を判定し、車両制御ECU18が、渋滞先頭距離計測装置16が判定した渋滞先頭JHの位置からの先行車200Pの位置に基づいて、先行車200Pの挙動を予測する。加減速度発生装置20は、車両制御ECU18が予測した先行車200Pの挙動に基づいて、先行車200Pに対して自車両100を追従走行させる。そのため、単なる先行車200Pの瞬間的な挙動への対応ではなく、渋滞先頭位置からの先行車200Pの位置に基づいて予測される先行車200Pの挙動に対応して、自車両100を追従走行させることとなるため、自車両100の無駄な加減速を低減することができる。
(もっと読む)
車両の走行支援システム及び方法
【課題】交差点において安全且つドライバーの意思に沿った車両の走行支援を行う。
【解決手段】走行支援システム(1)は、交差点における車両の走行を支援する。走行状態を検出する走行状態検出手段と、運転操作情報を検出する運転操作情報検出手段と、交差点情報を検出する交差点情報検出手段と、検出された走行状態、運転操作情報及び交差点情報を関連付けて、走行パターンとして記憶する学習手段と、検出された交差点情報が学習済み走行パターンに含まれる交差点情報と同一又は類似である場合に、当該学習済み走行パターンに従って、車両を制御する制御手段とを備える。
(もっと読む)
車両管理装置
【課題】 適確に車両を選定する。
【解決手段】 車両・運転管理装置1は、燃費条件下、使用頻度条件下、気象条件下、運転者条件下、道路条件下、安全条件下で、それぞれ、車両候補を選定し、各条件下で選出した候補のなかから、優先順位が高くかつ共通の候補を適正車両として選定する。これにより、適確に車両を選定することができる。例えば、長距離走行時には、優先的に低燃費の車両が割り当てられ、車両の使用頻度も均一化され、コスト低減に寄与することができる。
(もっと読む)
対象物追跡装置及びプログラム
【課題】対象物が路面に接する接地位置が撮影範囲から外れたり、遮られたりしている場合であっても、自車両の直近まで対象物を追跡して、精度よく対象物の路面上の位置を推定する。
【解決手段】対象物検出部42で、過去の撮像画像から求められた対象物の路面上の位置、及び車両運動情報に基づいて、現在の対象物の路面上での位置を予測して、対応する現在の撮像画像上の位置に検出枠を設定することで対象物を検出し、第1の位置推定部48で、検出枠範囲判定部44で検出枠の下側領域が撮影範囲内であると判定された場合に、検出枠内の画像の足元位置に基づいて、対象物の現在位置を推定し、第2の位置推定部50で、検出サイズ判定部46で検出枠のサイズが予め定めた大きさ以上であると判定された場合に、過去の撮像画像における対象物に対する現在の撮像画像における対象物の拡大率に基づいて、対象物の路面上の現在位置を推定する。
(もっと読む)
距離推定装置
【課題】従来よりも簡単な構成で距離の推定を可能にする距離推定装置の提供である。
【解決手段】対象物までの距離を推定する距離推定装置の一観点によれば、鏡と、対象物の実像および対象物の実像が映る領域以外の領域に鏡に映る対象物の鏡像を受光するレンズ部とレンズ部が受光した光を画像情報に変換する撮像素子とを有するカメラと、撮像素子が撮像した画像内の対象物の実像と鏡像の位置に基づき対象物までの距離を推定する電子制御ユニットとを有する。
(もっと読む)
自車影認識装置
【課題】 自車影領域を高精度に特定できる自車影認識装置を提供する。
【解決手段】 自車影認識装置11は、自車が走行している路面を含む範囲を撮像する自車周辺撮像装置300と、自車の現在位置の情報と、現在の日時の情報とから太陽の位置を算出する太陽位置算出手段110と、太陽位置算出手段110で得られた太陽の位置情報と、自車の進行方位情報と、自車の立体形状情報とから自車影が発生する領域を推定する自車影領域推定手段120と、自車影領域推定手段120から得られる座標情報に基づき、車両周辺撮像装置300で得られた画像の中から自車影領域を特定する自車影領域検出手段130と、を備えた。
(もっと読む)
ナビゲーション装置及びナビゲーションシステム
【課題】本発明は、経路案内のルートの順守率を向上させるナビゲーション装置及びナビゲーションシステムを提供することを課題とする。
【解決手段】ナビゲーション装置であって、経路案内のルートを設定するルート設定手段と、ルート設定手段で設定したルートに対するユーザの選択度合い(例えば、ユーザがルートに従って走行する順守率、インセンティブ量の異なる複数のルートの中からユーザが何れのルートを選択するか)に応じてインセンティブ量を設定するインセンティブ量設定手段を備えることを特徴とし、ルート設定手段はルートとして渋滞情報などに基づいて迂回ルートを設定すると好適である。
(もっと読む)
運転支援装置
【課題】運転者の違和感を抑制しつつ的確な安全確認支援を行うことができる運転支援装置を提供する。
【解決手段】運転支援装置は、車両の周囲を撮像する撮像部と、前記撮像部により撮影された画像を、車室内に設定された仮想視点から見た車両の周囲の画像に変換すると共に、前記仮想視点を中心として視覚方向を連続的に変化させた連続画像を生成する画像生成部と、前記画像生成部により生成された前記連続画像を表示する表示部と、シフトポジションが、前進走行のレンジ又は後退走行のレンジに切り替えられた場合に、前記表示部に前記連続画像を表示させる制御部と、を備える。
(もっと読む)
車両用運転状態検出装置、車両用運転状態検出方法および自動車
【課題】運転者の運転状態をより適切に検出すること。
【解決手段】自動車1Aは、車両用運転状態検出装置1を備え、車両走行状態(車線内横位置L)の分布を取得する。そして、取得した分布について複数の統計指標を算出し、これらの組み合わせを基に、車両走行状態の分布に歪みがあるか否かを判定する。自動車1Aは、車両走行状態(車線内横位置L)の分布において歪みを検出した場合、運転者が漫然運転を行っていると判定し、音および表示によって、運転者が漫然運転を行っていることに対する報知を行う。したがって、運転者の運転状態をより適切に検出することができる。
(もっと読む)
地図表示システム、端末装置及び地図表示方法
【課題】 いかなる縮尺の地図が表示されていても1回のスクロール操作によってユーザが所望する最適なスクロール量を提供するとともに、複数の表示画面を表示させた場合でも、ユーザが所望する地図情報を見易い態様で表示する。
【解決手段】 端末装置20は、表示画面に地図画像を含む各種画像を表示する表示手段204と、前記地図画像と、前記地図画像よりも広域な範囲を含んだ位置情報の相対的特性を用いた図形画像と、前記図形画像上の前記地図画像に対応する表示範囲を表す枠画像と、を各々異なるレイヤーとして管理し、表示手段204に重ねて表示させる表示制御手段205と、表示手段204に表示する画像に対する操作入力を受け付ける操作入力手段206と、を備え、操作入力手段206による前記図形画像と前記枠画像との相対位置を移動させるスクロール操作に伴い前記地図画像をスクロールさせる。
(もっと読む)
車車間通信装置
【課題】車車間通信装置において、自車両の現在位置を高精度に推定する。
【解決手段】車車間通信装置は、自車両(10)の測位位置を取得する測位位置取得手段(110)と、地図データに基づいて測位位置に対してマップマッチング処理を行うことにより、測位位置を補正して自車両の現在位置を推定する現在位置推定手段(121)と、現在位置の第1の信頼度を決定する信頼度決定手段(122)と、自車両と他車両(20a、20b)との間で情報の送受信を行う通信手段(130)と、複数の他車両における、それぞれの位置精度から求まる第2の信頼度が自車両の第1の信頼度よりも高い場合には、複数の他車両の各々の測位位置と現在位置との差分を複数の他車両の各々の第1の信頼度で重み付けして加算することにより補正量を算出し、該補正量及び自車両の測位位置に基づいて自車両の現在位置を変更する現在位置変更手段(124)とを備える。
(もっと読む)
路車間通信システム、路側通信機、及び車載機
【課題】車両進行方向前方の所定位置までの距離を精度よく求めることができる路車間通信システム、及び車載機を提供する。
【解決手段】本発明の路車間通信システムは、複数の送信フレームにより構成される第2ダウンリンク情報30を送信するビーコン制御機7を備えた光ビーコン4と、その第2ダウンリンク情報30を受信する車載機2を備えている。ビーコン制御機7は、前記複数の送信フレームそれぞれにアップリンク情報を受信した後の最初の第2ダウンリンク情報30の送信を基準とした送信経過情報を含めて送信する。車載機2は、総フレームに相当するすべての送信フレームを受信することで第2ダウンリンク情報30の受信を終えたときに、受信した送信フレームそれぞれに含まれる前記送信経過情報に基づいて、第2ダウンリンク情報30の受信を終えるのに要した受信経過時間を認識する経過時間認識部21aを備えている。
(もっと読む)
エネルギ消費量予測方法、エネルギ消費量予測装置および端末装置
【課題】特定の走行パターン、車両特性に依存しない、リンク固有の量である地形特徴量を利用して車両のエネルギ消費量を予測することを目的とする。
【解決手段】車両がリンクを走行する際に消費される消費エネルギを予測するナビサーバ1が、プローブカー2から収集したエネルギ消費量を基に、前記リンクの地形が消費エネルギに与える影響である地形特徴量をリンク毎に算出し、前記地形特徴量を基に、処理対象として選択されたリンクの予測エネルギ消費量を算出する。ナビ端末3は、この予測エネルギ消費量を取得し、取得した予測エネルギ消費量をコストとして、経路探索を行う。
(もっと読む)
車両用運転特性検出装置、車両用運転特性検出方法および自動車
【課題】運転者の特性をより高精度に検出すること。
【解決手段】自動車1Aは、車両用運転特性検出装置1を備え、車両走行状態の分布を取得する。そして、取得した分布について複数の統計指標を算出し、これらの組み合わせを基に、車両走行状態の分布に歪みがあるか否かを判定する。自動車1Aは、車両走行状態の分布に歪みがあると判定した場合、その分布を基に、運転者の限界値を検出する。このとき検出した運転者の限界値は、そのときの走行状況において、運転者が積極的な運転操作を行い、適正であると考える範囲からの逸脱を回避したことに依拠した値である。したがって、運転者の特性をより高精度に検出することができる。
(もっと読む)
携帯端末装置、情報処理方法、及び情報処理プログラム
【課題】 所望の方向の地理的位置に対応する対応情報を、直感的、簡単、かつ、迅速に取得可能とする。
【解決手段】 所望の方向の地理的位置に存在する建築物や店舗等の情報である対応情報を取得する際に、ユーザは、当該携帯電話機を、所望の方向に「擬似的に投げる」という投擲操作を行う。この投擲操作がなされると、当該携帯電話機に加わった力の強度を、ユーザにより設定された逓倍値に基づいて逓倍処理することで投擲距離を算出する。そして、現在位置から当該携帯電話機に加わった力の方向に、上記投擲距離だけ離れた位置を所定の投擲物の落下位置とし、この落下位置となる絶対位置に対応する対応情報をメモリ内の情報データベースから検出して表示部に表示する。携帯電話機を投げる真似をするという直感的、かつ、簡単な操作で、所望の地理的位置に対応する対応情報を迅速に取得することができる。
(もっと読む)
221 - 240 / 8,483
[ Back to top ]