
経路作成装置
【課題】走行経路の作成時間を短縮すること。
【解決手段】経路作成装置1は、ノードを繋ぐ線分を順次接続することにより開始点から目標点までの車両の走行経路を作成する装置である。この経路作成装置1は、空間上からランダムに抽出した点を基準に新たなノードを設定する処理を、目標点から所定の範囲内にノードが設定されるまで繰り返し実行し、設定されたノードを繋ぐ線分を順次接続することにより走行経路を作成する作成部16bと、車両の状況又は該車両の周辺の状況を検出する手段(障害物検出装置11や白線検出装置12など)と、検出された状況に基づいて、目標点をランダムに抽出した点とする確率を決定する確率決定部16aと、を備えることを特徴とする。
【解決手段】経路作成装置1は、ノードを繋ぐ線分を順次接続することにより開始点から目標点までの車両の走行経路を作成する装置である。この経路作成装置1は、空間上からランダムに抽出した点を基準に新たなノードを設定する処理を、目標点から所定の範囲内にノードが設定されるまで繰り返し実行し、設定されたノードを繋ぐ線分を順次接続することにより走行経路を作成する作成部16bと、車両の状況又は該車両の周辺の状況を検出する手段(障害物検出装置11や白線検出装置12など)と、検出された状況に基づいて、目標点をランダムに抽出した点とする確率を決定する確率決定部16aと、を備えることを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両の走行経路を作成する経路作成装置に関する。
【背景技術】
【0002】
従来から、自動車等の移動経路をRRT(Rapidly-exploring Random Tree)という手法を用いて作成(計画)する技術が知られており(下記非特許文献1参照)、その技術を用いれば、例えば衝突を回避するための最適な走行経路を作成することができる。RRTでは、空間上からランダムに抽出した点(以下では抽出点ともいう)を基準に新たなノードを設定する処理を繰り返し、最後にノードを繋ぐ線分を順次接続することにより開始点から目標点までの経路を作成する。
【先行技術文献】
【非特許文献】
【0003】
【非特許文献1】P. Cheng, Z. Shen and S. M. LaValle, "RRT-Based Trajectory Designfor Autonomous Automobiles and Spacecraft," Archives of Control Sciences,Vol. 11, No. 3-4, 2001, pp. 51-78
【発明の概要】
【発明が解決しようとする課題】
【0004】
RRTではある一定の確率で目標点が抽出点となるようにロジックが組まれているが、その確率は固定値であるので、車両の走行経路を作成しようとすると、場合によっては演算時間が増大する可能性がある。
【0005】
そこで本発明は、走行経路の作成時間を短縮することが可能な経路作成装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の経路作成装置は、ノードを繋ぐ線分を順次接続することにより開始点から目標点までの車両の走行経路を作成する経路作成装置であって、空間上からランダムに抽出した点を基準に新たなノードを設定する処理を、目標点から所定の範囲内にノードが設定されるまで繰り返し実行し、設定されたノードを繋ぐ線分を順次接続することにより走行経路を作成する作成手段と、車両の状況又は該車両の周辺の状況を検出する検出手段と、検出手段により検出された状況に基づいて、目標点をランダムに抽出した点とする確率を決定する決定手段と、を備えることを特徴とする。
【0007】
ノードを設ける基準となる抽出点が目標点と一致する確率が高ければノードは目標点に向かって直線的に生成され易くなる一方で、その確率を低くすれば、作成される経路は迂回しながら目標点に向かう傾向を有する。したがって、目標点を抽出点とする確率を車両又はその周辺の状況に基づいて定めることで、ノードが目標点に向かって設定されていく時間を調節でき、その結果、走行経路の作成時間を短縮することが可能になる。
【0008】
本発明の経路作成装置では、検出手段が車両の現在位置及び進行方向を検出し、決定手段が、検出手段により検出された車両の現在位置及び進行方向に基づいて、該車両の進行方向に沿った軸と該車両及び目標点を結ぶ軸との角度を算出し、算出された角度が小さいほど確率を高くしてもよい。
【0009】
この場合、車両の前方よりに目標点があるほど確率が高く設定されるので、車両の機能上進行することが困難な領域に抽出点が設定されるのが回避され易くなり、ノードが目標点に向かって設定され易くなる。その結果、ノード設定処理の繰り返し回数が少なくなり、走行経路の作成時間を短縮することができる。
【0010】
本発明の経路作成装置では、検出手段が車両周辺の障害物の位置を検出し、決定手段が、検出手段により検出された障害物の位置に基づいて車両と目標点との間に障害物が存在するか否かを判定し、車両と目標点との間に障害物が存在する場合には、そうでない場合よりも確率を低くしてもよい。
【0011】
この場合、車両と目標点との間に障害物がある場合にはそうでない場合よりも確率が低く設定されるので、ノードがその障害物を迂回するように設定され易くなる。その結果、ノード設定処理の繰り返し回数が少なくなり、走行経路の作成時間を短縮することができる。
【発明の効果】
【0012】
このような経路作成装置によれば、目標点を抽出点とする確率が車両又はその周辺の状況に基づいて定められるので、ノードが目標点に向かって設定されていく時間を調節でき、その結果、走行経路の作成時間を短縮することが可能になる。
【図面の簡単な説明】
【0013】
【図1】各実施形態に係る経路作成装置の構成を示す図である。
【図2】(a),(b)はRRTを用いた経路作成の手順を示す図である。
【図3】(a)〜(c)はRRTを用いた経路作成の手順を示す図である。
【図4】RRTを用いた経路作成の手順を示す図である。
【図5】車両の進行方向と目標点との関係の例を示す図である。
【図6】車両の進行方向及び目標点に基づいて定まる角度と確率との関係の例を示すグラフである。
【発明を実施するための形態】
【0014】
以下、添付図面を参照しながら本発明の実施形態を詳細に説明する。なお、図面の説明において同一又は同等の要素には同一の符号を付し、重複する説明を省略する。
【0015】
(第1実施形態)
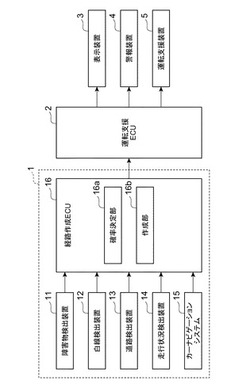
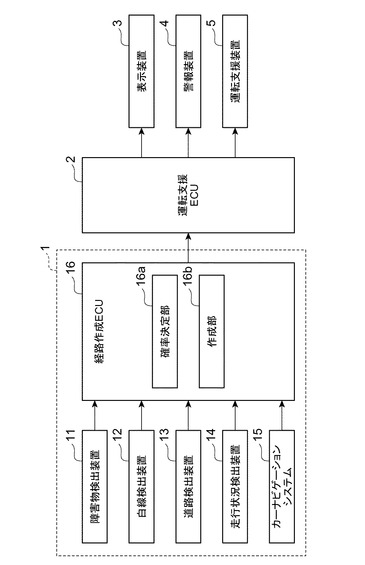
まず、図1〜4を用いて、第1実施形態に係る経路作成装置1の機能及び構成を説明する。経路作成装置1は車両の走行経路を作成する装置であり、図1に示すように障害物検出装置11、白線検出装置12、道路検出装置13、走行状況検出装置14、カーナビゲーションシステム15、及び経路作成ECU16を備えている。経路作成装置1は、表示装置3、警報装置4、及び運転支援装置5を制御する運転支援ECU2と接続されている。
【0016】
障害物検出装置11はミリ波レーダやレーザレーダ等を含んで構成され、車両周辺に存在する障害物(建物やガードレール、歩行者等のような、車両の走行を妨げるもの)の位置を検出する装置である。障害物検出装置11は所定の間隔で検出処理を実行し、検出結果を随時、障害物情報として経路作成ECU16に出力する。
【0017】
白線検出装置12はカメラや画像処理装置等を含んで構成され、道路上に付された白線(車線)の位置を検出する装置である。白線検出装置12は所定の間隔で検出処理を実行し、検出結果を随時、白線情報として経路作成ECU16に出力する。
【0018】
道路検出装置13はレーザレーダ等を含んで構成され、道路の形状を検出する装置である。道路検出装置13は所定の間隔で検出処理を実行し、検出結果を随時、道路形状情報として経路作成ECU16に出力する。
【0019】
走行状況検出装置14は車輪速センサやヨーレートセンサ、操舵角センサ等を含んで構成され、速度や操舵角といった車両の運転状況を検出する装置である。走行状況検出装置14は所定の間隔で検出処理を実行し、検出結果を随時、運転情報として経路作成ECU16に出力する。
【0020】
カーナビゲーションシステム15は周辺環境データベースやGPS(全地球測位システム)を備え、目的地までの経路案内などを実行する装置である。カーナビゲーションシステム15は経路作成ECU16からのアクセスを受け付け、周辺環境データベースに記憶されている地図情報や、GPSにより得られた車両の現在位置及び進行方向を示す位置情報を経路作成ECU16に出力する。
【0021】
以上説明した各検出装置及びカーナビゲーションシステムは、目標点を抽出点とする確率(後述)を決定するための情報である、車両あるいはその周辺の状況を検出する手段であるといえる。
【0022】
経路作成ECU16は、RRTという手法を用いて開始点から目標点までの車両の走行経路(目標経路)を作成する電子制御ユニット(ECU)である。この経路作成ECU16は機能的構成要素として確率決定部(決定手段)16a及び作成部(作成手段)16bを備えている。確率決定部16aはRRTにおいて目標点を抽出点とする確率Pを決定する手段である。作成部16bはその確率Pに基づいて開始点から目標点までの間にノード(中継点)を設定し、最後にノードを繋ぐ線分を順次接続することで走行経路を作成する手段である。これらの構成要素は、RRTアルゴリズムを含む所定のプログラムがECUに読み込まれて実行されることで実現される。
【0023】
説明の都合上、まず図2〜4を用いて作成部16bの経路作成処理(RRTアルゴリズム)を説明し、続いて確率決定部16aの機能を説明する。
【0024】
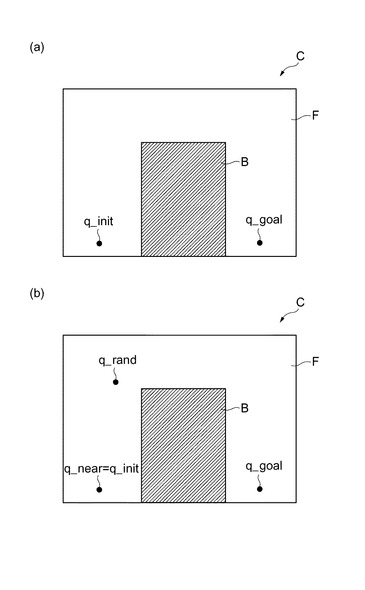
車両が走行できる自由空間Fと車両が走行できない衝突空間(障害物)Bとから構成される状態空間Cにおいて、開始点(ツリーのルートノード)q_init及び目標点q_goalが図2(a)に示すように設定されたとする。作成部16bはまず、状態空間Cからランダムに点q_randを抽出する(図2(b)参照)。すなわち、q_randは抽出点である。このとき作成部16bは、確率決定部16aから入力された確率Pで目標点q_goalを抽出点q_randとする。続いて作成部16bは、ツリー上のノードの中から、抽出点q_randに最も近いノードq_nearを探す。作成処理開始直後はツリーを構成するノードが図2(b)のように開始点q_initしか存在しないので、q_near=q_initとなる。
【0025】
続いて作成部16bは、点q_nearから点q_randに向かって一定の距離ε進んだ地点に新たなノードq_newを設定する(図3(a)参照)。この距離εはステップサイズといい、作成部16bはその値εを予め内部に記憶している。このとき、点q_randとq_nearとの距離がステップサイズεよりも小さければ、作成部16bは点q_randをそのまま新たなノードq_newとして設定する(図3(b)参照)。また、図3(c)に示すようにノードq_newの位置が衝突空間B内に位置した場合は、作成部16bはこのノードq_new及び対応する抽出点q_randを破棄し、新たに点q_randを抽出するところから処理をやり直す。
【0026】
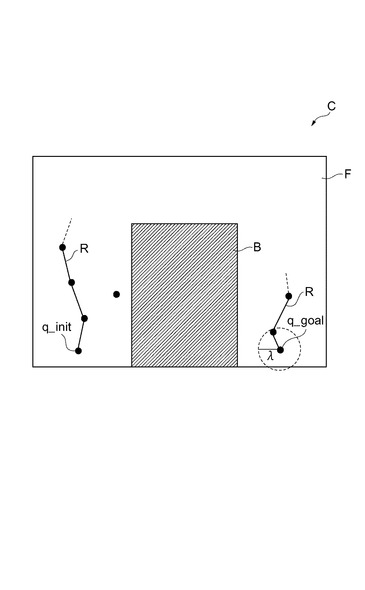
作成部16bは点q_randの抽出からノードq_newの設定までの処理を、目標点q_goalから所定の距離λ内にノードq_newが設定されるまで繰り返す(図4参照)。なお、値λはステップサイズεと同じでもよいし異なってもよい。続いて作成部16bは、図4に示すように二つのノードを繋ぐ線分を順次接続することで、開始点q_initから0個以上のノードq_newを経て目標点q_goalに至る走行経路Rを作成する。そして作成部16bは、生成した走行経路Rを示す経路情報を運転支援ECU2に出力する。
【0027】
次に確率決定部16aについて図5,6を参照しながら説明する。本実施形態において確率決定部16aは、車両の進行方向と目標点との位置関係に基づいて確率Pを決定する。具体的には、確率決定部16aは、カーナビゲーションシステム15から取得した地図情報及び位置情報に基づいて、車両の絶対座標(Xo,Yo,θo)及び目標点の絶対座標(Xg,Yg)を特定する。なお、θoはX軸と車両Vの進行方向との角度である。例えば、車両V及び目標点が図5に示すように位置しているとする。
【0028】
続いて確率決定部16aは、目標点の絶対座標(Xg,Yg)を相対座標(xg,yg)に変換する。ここで目標点の相対座標とは、図5に示すように、車両Vの進行方向をx軸とし、それに直交する軸(車両Vの幅方向)をy軸とした座標系における目標点の座標のことをいう。絶対座標(Xg,Yg)から相対座標(xg,yg)への変換は下記式(1)で表される。
【数1】

【0029】
続いて確率決定部16aは、車両Vの進行方向に沿った軸(x軸)と車両V及び目標点を結ぶ軸との角度B(rad)(図5参照)を下記式(2)により算出する。
B=tan−1(|yg|/|xg|) …(2)
【0030】
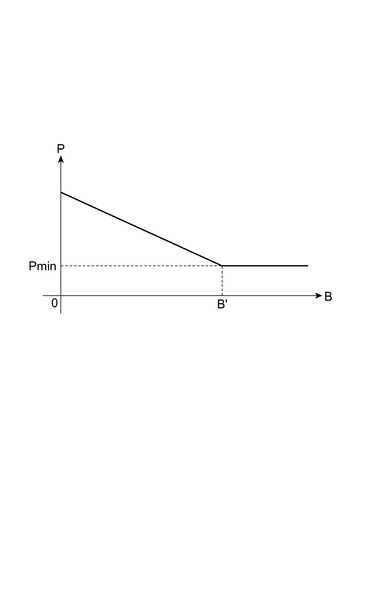
続いて確率決定部16aは、予め記憶している角度Bと確率Pとの対応関係に上記式(2)の計算結果を当てはめることで確率Pを決定し、その値を作成部16bに出力する。例えば確率決定部16aは、図6のグラフで示される角度Bと確率Pとの対応関係に基づいて確率Pを決定する。図6の例では、角度BがB’以上であれば確率Pを最小値Pminに固定している。角度Bと確率Pとの対応関係は、その角度Bが小さいほど、すなわち車両の前方よりに目標点があるほど確率Pが高くなるように設定される。なお、確率Pの決定方法はこれに限定されず、例えば角度Bが所定値以下であれば確率をPAとし、そうでなければ確率をPB(ただしPB<PA)としてもよい。
【0031】
確率決定部16aは、上記のように決定した確率Pを作成部16bに出力する。これを受けて作成部16bは上記のような経路作成処理を実行する。確率決定処理は走行経路を作成する処理の冒頭で一回だけ実行される。なお、走行経路作成処理自体は繰り返し(例えば周期的に)実行され得る。
【0032】
図1に戻って、運転支援ECU2は、経路情報に基づいて運転者又は運転を支援する制御を実行するECUである。運転支援ECUは入力された経路情報に基づいて表示装置3や警報装置4、運転支援装置5を制御する。
【0033】
ここで、表示装置3はメータやヘッドアップ・ディスプレイ(HUD)等を含んで構成され、テキストや画像で構成される情報を提供する装置である。また、警報装置4はスピーカを含んで構成され、音声案内や警報音を発する装置である。運転支援装置5はブレーキ・アクチュエータや電動パワーステアリング(EPS)アクチュエータを含んで構成され、減速や操舵を自動的に行うことで運転を補助する装置である。
【0034】
運転支援ECU2における経路情報の利用方法は任意である。例えば運転支援ECU2は、経路情報で示される走行経路を表示装置3に表示してもよい。また運転支援ECU2は、経路情報で示される走行経路と実際の走行経路とのずれが所定値以上になった場合に警報装置4から警報を発したり運転支援装置5を作動させたりしてもよい。
【0035】
以上説明したように本実施形態によれば、車両の前方よりに目標点があるほど確率Pが高く設定されるので、車両の機能上進行することが困難な領域に抽出点が設定されるのが回避され易くなり、ノードが目標点に向かって設定され易くなる。その結果、ノード設定処理の繰り返し回数が少なくなり、走行経路の作成時間を短縮することができる。
【0036】
ノードq_newを設ける基準となる抽出点q_randが目標点q_goalと一致する確率が高ければノードq_newは目標点に向かって直線的に生成され易くなる一方で、その確率を低くすれば、作成される経路は迂回しながら目標点q_goalに向かう傾向を有する。したがって、目標点を抽出点とする確率を上記のように車両又はその周辺の状況に基づいて定めることで、ノードq_newが目標点に向かって設定されていく時間を調節でき、その結果、走行経路の作成時間を短縮することが可能になる。
【0037】
(第2実施形態)
次に、第2実施形態に係る経路作成装置1の機能及び構成を説明する。第1実施形態と異なる点は確率Pの決定方法なのでこの点について特に説明し、他の部分については説明を省略する。また、装置のハードウェア構成や機能ブロックは第1実施形態と同様なので、当該実施形態と同一の符号を用いて説明する。
【0038】
本実施形態において確率決定部16aは、障害物の位置に基づいて確率Pを決定する。確率決定部16aは、例えば入力された障害物情報、白線情報、道路形状情報、運転情報、及びカーナビゲーションシステム15から読み出した地図情報のうちの少なくとも一つに基づいて障害物の位置を算出する。続いて確率決定部16aは車両と目標点とを結ぶ線分上に障害物が存在するか否かを判定する。ここで、車両の位置は経路の開始点に相当する。
【0039】
そして、その線分上に何らかの障害物が存在する場合に、確率決定部16aは現在の確率Pを所定の値だけ低くする。このとき確率決定部16aは、その線分上に障害物が存在しない場合に確率Pを所定の値だけ高くしてもよい。いずれにせよ、このような処理により、車両と目標点とを結ぶ線分上に障害物が存在する場合には、そうでない場合よりも確率Pが低くなる。確率決定部16aはこのように補正した確率Pを作成部16bに出力する。
【0040】
以上説明したように本実施形態によれば、車両と目標点との間に障害物がある場合にはそうでない場合よりも確率が低く設定されるので、ノードがその障害物を迂回するように設定され易くなる。その結果、ノード設定処理の繰り返し回数が少なくなり、走行経路の作成時間を短縮することができる。
【0041】
以上、本発明をその実施形態に基づいて詳細に説明した。しかし、本発明は上記実施形態に限定されるものではない。本発明は、その要旨を逸脱しない範囲で様々な変形が可能である。
【0042】
確率決定部16aは、上記第1及び第2実施形態を組み合わせた手法により確率Pを決定してもよい。例えば確率決定部16aは、上記第1実施形態のように車両の進行方向と目標点との位置関係に基づいて確率Pを仮決定し、続いて上記第2実施形態のように障害物の有無に基づいてその確率Pを補正した上で、補正後の確率Pを作成部16bに出力してもよい。
【0043】
上記各実施形態の経路作成装置1の車両への搭載方法は任意である。例えば、経路作成装置1全体を車両に搭載して当該車両、すなわち自車両の移動経路を作成してもよい。また、経路作成ECU16以外の部分を車両に搭載し、経路作成ECU16に相当する機能を車外のシステムに埋め込み、当該システムと車両とを通信ネットワークで結ぶことで当該車両の移動経路を作成してもよい。
【符号の説明】
【0044】
1…経路作成装置、11…障害物検出装置(検出手段)、12…白線検出装置(検出手段)、13…道路検出装置(検出手段)、14…走行状況検出装置(検出手段)、15…カーナビゲーションシステム(検出手段)、16…経路作成ECU、16a…確率決定部(決定手段)、16b…作成部(作成手段)。
【技術分野】
【0001】
本発明は、車両の走行経路を作成する経路作成装置に関する。
【背景技術】
【0002】
従来から、自動車等の移動経路をRRT(Rapidly-exploring Random Tree)という手法を用いて作成(計画)する技術が知られており(下記非特許文献1参照)、その技術を用いれば、例えば衝突を回避するための最適な走行経路を作成することができる。RRTでは、空間上からランダムに抽出した点(以下では抽出点ともいう)を基準に新たなノードを設定する処理を繰り返し、最後にノードを繋ぐ線分を順次接続することにより開始点から目標点までの経路を作成する。
【先行技術文献】
【非特許文献】
【0003】
【非特許文献1】P. Cheng, Z. Shen and S. M. LaValle, "RRT-Based Trajectory Designfor Autonomous Automobiles and Spacecraft," Archives of Control Sciences,Vol. 11, No. 3-4, 2001, pp. 51-78
【発明の概要】
【発明が解決しようとする課題】
【0004】
RRTではある一定の確率で目標点が抽出点となるようにロジックが組まれているが、その確率は固定値であるので、車両の走行経路を作成しようとすると、場合によっては演算時間が増大する可能性がある。
【0005】
そこで本発明は、走行経路の作成時間を短縮することが可能な経路作成装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の経路作成装置は、ノードを繋ぐ線分を順次接続することにより開始点から目標点までの車両の走行経路を作成する経路作成装置であって、空間上からランダムに抽出した点を基準に新たなノードを設定する処理を、目標点から所定の範囲内にノードが設定されるまで繰り返し実行し、設定されたノードを繋ぐ線分を順次接続することにより走行経路を作成する作成手段と、車両の状況又は該車両の周辺の状況を検出する検出手段と、検出手段により検出された状況に基づいて、目標点をランダムに抽出した点とする確率を決定する決定手段と、を備えることを特徴とする。
【0007】
ノードを設ける基準となる抽出点が目標点と一致する確率が高ければノードは目標点に向かって直線的に生成され易くなる一方で、その確率を低くすれば、作成される経路は迂回しながら目標点に向かう傾向を有する。したがって、目標点を抽出点とする確率を車両又はその周辺の状況に基づいて定めることで、ノードが目標点に向かって設定されていく時間を調節でき、その結果、走行経路の作成時間を短縮することが可能になる。
【0008】
本発明の経路作成装置では、検出手段が車両の現在位置及び進行方向を検出し、決定手段が、検出手段により検出された車両の現在位置及び進行方向に基づいて、該車両の進行方向に沿った軸と該車両及び目標点を結ぶ軸との角度を算出し、算出された角度が小さいほど確率を高くしてもよい。
【0009】
この場合、車両の前方よりに目標点があるほど確率が高く設定されるので、車両の機能上進行することが困難な領域に抽出点が設定されるのが回避され易くなり、ノードが目標点に向かって設定され易くなる。その結果、ノード設定処理の繰り返し回数が少なくなり、走行経路の作成時間を短縮することができる。
【0010】
本発明の経路作成装置では、検出手段が車両周辺の障害物の位置を検出し、決定手段が、検出手段により検出された障害物の位置に基づいて車両と目標点との間に障害物が存在するか否かを判定し、車両と目標点との間に障害物が存在する場合には、そうでない場合よりも確率を低くしてもよい。
【0011】
この場合、車両と目標点との間に障害物がある場合にはそうでない場合よりも確率が低く設定されるので、ノードがその障害物を迂回するように設定され易くなる。その結果、ノード設定処理の繰り返し回数が少なくなり、走行経路の作成時間を短縮することができる。
【発明の効果】
【0012】
このような経路作成装置によれば、目標点を抽出点とする確率が車両又はその周辺の状況に基づいて定められるので、ノードが目標点に向かって設定されていく時間を調節でき、その結果、走行経路の作成時間を短縮することが可能になる。
【図面の簡単な説明】
【0013】
【図1】各実施形態に係る経路作成装置の構成を示す図である。
【図2】(a),(b)はRRTを用いた経路作成の手順を示す図である。
【図3】(a)〜(c)はRRTを用いた経路作成の手順を示す図である。
【図4】RRTを用いた経路作成の手順を示す図である。
【図5】車両の進行方向と目標点との関係の例を示す図である。
【図6】車両の進行方向及び目標点に基づいて定まる角度と確率との関係の例を示すグラフである。
【発明を実施するための形態】
【0014】
以下、添付図面を参照しながら本発明の実施形態を詳細に説明する。なお、図面の説明において同一又は同等の要素には同一の符号を付し、重複する説明を省略する。
【0015】
(第1実施形態)
まず、図1〜4を用いて、第1実施形態に係る経路作成装置1の機能及び構成を説明する。経路作成装置1は車両の走行経路を作成する装置であり、図1に示すように障害物検出装置11、白線検出装置12、道路検出装置13、走行状況検出装置14、カーナビゲーションシステム15、及び経路作成ECU16を備えている。経路作成装置1は、表示装置3、警報装置4、及び運転支援装置5を制御する運転支援ECU2と接続されている。
【0016】
障害物検出装置11はミリ波レーダやレーザレーダ等を含んで構成され、車両周辺に存在する障害物(建物やガードレール、歩行者等のような、車両の走行を妨げるもの)の位置を検出する装置である。障害物検出装置11は所定の間隔で検出処理を実行し、検出結果を随時、障害物情報として経路作成ECU16に出力する。
【0017】
白線検出装置12はカメラや画像処理装置等を含んで構成され、道路上に付された白線(車線)の位置を検出する装置である。白線検出装置12は所定の間隔で検出処理を実行し、検出結果を随時、白線情報として経路作成ECU16に出力する。
【0018】
道路検出装置13はレーザレーダ等を含んで構成され、道路の形状を検出する装置である。道路検出装置13は所定の間隔で検出処理を実行し、検出結果を随時、道路形状情報として経路作成ECU16に出力する。
【0019】
走行状況検出装置14は車輪速センサやヨーレートセンサ、操舵角センサ等を含んで構成され、速度や操舵角といった車両の運転状況を検出する装置である。走行状況検出装置14は所定の間隔で検出処理を実行し、検出結果を随時、運転情報として経路作成ECU16に出力する。
【0020】
カーナビゲーションシステム15は周辺環境データベースやGPS(全地球測位システム)を備え、目的地までの経路案内などを実行する装置である。カーナビゲーションシステム15は経路作成ECU16からのアクセスを受け付け、周辺環境データベースに記憶されている地図情報や、GPSにより得られた車両の現在位置及び進行方向を示す位置情報を経路作成ECU16に出力する。
【0021】
以上説明した各検出装置及びカーナビゲーションシステムは、目標点を抽出点とする確率(後述)を決定するための情報である、車両あるいはその周辺の状況を検出する手段であるといえる。
【0022】
経路作成ECU16は、RRTという手法を用いて開始点から目標点までの車両の走行経路(目標経路)を作成する電子制御ユニット(ECU)である。この経路作成ECU16は機能的構成要素として確率決定部(決定手段)16a及び作成部(作成手段)16bを備えている。確率決定部16aはRRTにおいて目標点を抽出点とする確率Pを決定する手段である。作成部16bはその確率Pに基づいて開始点から目標点までの間にノード(中継点)を設定し、最後にノードを繋ぐ線分を順次接続することで走行経路を作成する手段である。これらの構成要素は、RRTアルゴリズムを含む所定のプログラムがECUに読み込まれて実行されることで実現される。
【0023】
説明の都合上、まず図2〜4を用いて作成部16bの経路作成処理(RRTアルゴリズム)を説明し、続いて確率決定部16aの機能を説明する。
【0024】
車両が走行できる自由空間Fと車両が走行できない衝突空間(障害物)Bとから構成される状態空間Cにおいて、開始点(ツリーのルートノード)q_init及び目標点q_goalが図2(a)に示すように設定されたとする。作成部16bはまず、状態空間Cからランダムに点q_randを抽出する(図2(b)参照)。すなわち、q_randは抽出点である。このとき作成部16bは、確率決定部16aから入力された確率Pで目標点q_goalを抽出点q_randとする。続いて作成部16bは、ツリー上のノードの中から、抽出点q_randに最も近いノードq_nearを探す。作成処理開始直後はツリーを構成するノードが図2(b)のように開始点q_initしか存在しないので、q_near=q_initとなる。
【0025】
続いて作成部16bは、点q_nearから点q_randに向かって一定の距離ε進んだ地点に新たなノードq_newを設定する(図3(a)参照)。この距離εはステップサイズといい、作成部16bはその値εを予め内部に記憶している。このとき、点q_randとq_nearとの距離がステップサイズεよりも小さければ、作成部16bは点q_randをそのまま新たなノードq_newとして設定する(図3(b)参照)。また、図3(c)に示すようにノードq_newの位置が衝突空間B内に位置した場合は、作成部16bはこのノードq_new及び対応する抽出点q_randを破棄し、新たに点q_randを抽出するところから処理をやり直す。
【0026】
作成部16bは点q_randの抽出からノードq_newの設定までの処理を、目標点q_goalから所定の距離λ内にノードq_newが設定されるまで繰り返す(図4参照)。なお、値λはステップサイズεと同じでもよいし異なってもよい。続いて作成部16bは、図4に示すように二つのノードを繋ぐ線分を順次接続することで、開始点q_initから0個以上のノードq_newを経て目標点q_goalに至る走行経路Rを作成する。そして作成部16bは、生成した走行経路Rを示す経路情報を運転支援ECU2に出力する。
【0027】
次に確率決定部16aについて図5,6を参照しながら説明する。本実施形態において確率決定部16aは、車両の進行方向と目標点との位置関係に基づいて確率Pを決定する。具体的には、確率決定部16aは、カーナビゲーションシステム15から取得した地図情報及び位置情報に基づいて、車両の絶対座標(Xo,Yo,θo)及び目標点の絶対座標(Xg,Yg)を特定する。なお、θoはX軸と車両Vの進行方向との角度である。例えば、車両V及び目標点が図5に示すように位置しているとする。
【0028】
続いて確率決定部16aは、目標点の絶対座標(Xg,Yg)を相対座標(xg,yg)に変換する。ここで目標点の相対座標とは、図5に示すように、車両Vの進行方向をx軸とし、それに直交する軸(車両Vの幅方向)をy軸とした座標系における目標点の座標のことをいう。絶対座標(Xg,Yg)から相対座標(xg,yg)への変換は下記式(1)で表される。
【数1】
【0029】
続いて確率決定部16aは、車両Vの進行方向に沿った軸(x軸)と車両V及び目標点を結ぶ軸との角度B(rad)(図5参照)を下記式(2)により算出する。
B=tan−1(|yg|/|xg|) …(2)
【0030】
続いて確率決定部16aは、予め記憶している角度Bと確率Pとの対応関係に上記式(2)の計算結果を当てはめることで確率Pを決定し、その値を作成部16bに出力する。例えば確率決定部16aは、図6のグラフで示される角度Bと確率Pとの対応関係に基づいて確率Pを決定する。図6の例では、角度BがB’以上であれば確率Pを最小値Pminに固定している。角度Bと確率Pとの対応関係は、その角度Bが小さいほど、すなわち車両の前方よりに目標点があるほど確率Pが高くなるように設定される。なお、確率Pの決定方法はこれに限定されず、例えば角度Bが所定値以下であれば確率をPAとし、そうでなければ確率をPB(ただしPB<PA)としてもよい。
【0031】
確率決定部16aは、上記のように決定した確率Pを作成部16bに出力する。これを受けて作成部16bは上記のような経路作成処理を実行する。確率決定処理は走行経路を作成する処理の冒頭で一回だけ実行される。なお、走行経路作成処理自体は繰り返し(例えば周期的に)実行され得る。
【0032】
図1に戻って、運転支援ECU2は、経路情報に基づいて運転者又は運転を支援する制御を実行するECUである。運転支援ECUは入力された経路情報に基づいて表示装置3や警報装置4、運転支援装置5を制御する。
【0033】
ここで、表示装置3はメータやヘッドアップ・ディスプレイ(HUD)等を含んで構成され、テキストや画像で構成される情報を提供する装置である。また、警報装置4はスピーカを含んで構成され、音声案内や警報音を発する装置である。運転支援装置5はブレーキ・アクチュエータや電動パワーステアリング(EPS)アクチュエータを含んで構成され、減速や操舵を自動的に行うことで運転を補助する装置である。
【0034】
運転支援ECU2における経路情報の利用方法は任意である。例えば運転支援ECU2は、経路情報で示される走行経路を表示装置3に表示してもよい。また運転支援ECU2は、経路情報で示される走行経路と実際の走行経路とのずれが所定値以上になった場合に警報装置4から警報を発したり運転支援装置5を作動させたりしてもよい。
【0035】
以上説明したように本実施形態によれば、車両の前方よりに目標点があるほど確率Pが高く設定されるので、車両の機能上進行することが困難な領域に抽出点が設定されるのが回避され易くなり、ノードが目標点に向かって設定され易くなる。その結果、ノード設定処理の繰り返し回数が少なくなり、走行経路の作成時間を短縮することができる。
【0036】
ノードq_newを設ける基準となる抽出点q_randが目標点q_goalと一致する確率が高ければノードq_newは目標点に向かって直線的に生成され易くなる一方で、その確率を低くすれば、作成される経路は迂回しながら目標点q_goalに向かう傾向を有する。したがって、目標点を抽出点とする確率を上記のように車両又はその周辺の状況に基づいて定めることで、ノードq_newが目標点に向かって設定されていく時間を調節でき、その結果、走行経路の作成時間を短縮することが可能になる。
【0037】
(第2実施形態)
次に、第2実施形態に係る経路作成装置1の機能及び構成を説明する。第1実施形態と異なる点は確率Pの決定方法なのでこの点について特に説明し、他の部分については説明を省略する。また、装置のハードウェア構成や機能ブロックは第1実施形態と同様なので、当該実施形態と同一の符号を用いて説明する。
【0038】
本実施形態において確率決定部16aは、障害物の位置に基づいて確率Pを決定する。確率決定部16aは、例えば入力された障害物情報、白線情報、道路形状情報、運転情報、及びカーナビゲーションシステム15から読み出した地図情報のうちの少なくとも一つに基づいて障害物の位置を算出する。続いて確率決定部16aは車両と目標点とを結ぶ線分上に障害物が存在するか否かを判定する。ここで、車両の位置は経路の開始点に相当する。
【0039】
そして、その線分上に何らかの障害物が存在する場合に、確率決定部16aは現在の確率Pを所定の値だけ低くする。このとき確率決定部16aは、その線分上に障害物が存在しない場合に確率Pを所定の値だけ高くしてもよい。いずれにせよ、このような処理により、車両と目標点とを結ぶ線分上に障害物が存在する場合には、そうでない場合よりも確率Pが低くなる。確率決定部16aはこのように補正した確率Pを作成部16bに出力する。
【0040】
以上説明したように本実施形態によれば、車両と目標点との間に障害物がある場合にはそうでない場合よりも確率が低く設定されるので、ノードがその障害物を迂回するように設定され易くなる。その結果、ノード設定処理の繰り返し回数が少なくなり、走行経路の作成時間を短縮することができる。
【0041】
以上、本発明をその実施形態に基づいて詳細に説明した。しかし、本発明は上記実施形態に限定されるものではない。本発明は、その要旨を逸脱しない範囲で様々な変形が可能である。
【0042】
確率決定部16aは、上記第1及び第2実施形態を組み合わせた手法により確率Pを決定してもよい。例えば確率決定部16aは、上記第1実施形態のように車両の進行方向と目標点との位置関係に基づいて確率Pを仮決定し、続いて上記第2実施形態のように障害物の有無に基づいてその確率Pを補正した上で、補正後の確率Pを作成部16bに出力してもよい。
【0043】
上記各実施形態の経路作成装置1の車両への搭載方法は任意である。例えば、経路作成装置1全体を車両に搭載して当該車両、すなわち自車両の移動経路を作成してもよい。また、経路作成ECU16以外の部分を車両に搭載し、経路作成ECU16に相当する機能を車外のシステムに埋め込み、当該システムと車両とを通信ネットワークで結ぶことで当該車両の移動経路を作成してもよい。
【符号の説明】
【0044】
1…経路作成装置、11…障害物検出装置(検出手段)、12…白線検出装置(検出手段)、13…道路検出装置(検出手段)、14…走行状況検出装置(検出手段)、15…カーナビゲーションシステム(検出手段)、16…経路作成ECU、16a…確率決定部(決定手段)、16b…作成部(作成手段)。
【特許請求の範囲】
【請求項1】
ノードを繋ぐ線分を順次接続することにより開始点から目標点までの車両の走行経路を作成する経路作成装置であって、
空間上からランダムに抽出した点を基準に新たなノードを設定する処理を、前記目標点から所定の範囲内にノードが設定されるまで繰り返し実行し、設定されたノードを繋ぐ線分を順次接続することにより前記走行経路を作成する作成手段と、
前記車両の状況又は該車両の周辺の状況を検出する検出手段と、
前記検出手段により検出された状況に基づいて、前記目標点を前記ランダムに抽出した点とする確率を決定する決定手段と、
を備えることを特徴とする経路作成装置。
【請求項2】
前記検出手段が前記車両の現在位置及び進行方向を検出し、
前記決定手段が、前記検出手段により検出された前記車両の現在位置及び進行方向に基づいて、該車両の進行方向に沿った軸と該車両及び前記目標点を結ぶ軸との角度を算出し、算出された角度が小さいほど前記確率を高くする、
ことを特徴とする請求項1に記載の経路作成装置。
【請求項3】
前記検出手段が前記車両周辺の障害物の位置を検出し、
前記決定手段が、前記検出手段により検出された障害物の位置に基づいて前記車両と前記目標点との間に障害物が存在するか否かを判定し、前記車両と前記目標点との間に障害物が存在する場合には、そうでない場合よりも前記確率を低くする、
ことを特徴とする請求項1又は2に記載の経路作成装置。
【請求項1】
ノードを繋ぐ線分を順次接続することにより開始点から目標点までの車両の走行経路を作成する経路作成装置であって、
空間上からランダムに抽出した点を基準に新たなノードを設定する処理を、前記目標点から所定の範囲内にノードが設定されるまで繰り返し実行し、設定されたノードを繋ぐ線分を順次接続することにより前記走行経路を作成する作成手段と、
前記車両の状況又は該車両の周辺の状況を検出する検出手段と、
前記検出手段により検出された状況に基づいて、前記目標点を前記ランダムに抽出した点とする確率を決定する決定手段と、
を備えることを特徴とする経路作成装置。
【請求項2】
前記検出手段が前記車両の現在位置及び進行方向を検出し、
前記決定手段が、前記検出手段により検出された前記車両の現在位置及び進行方向に基づいて、該車両の進行方向に沿った軸と該車両及び前記目標点を結ぶ軸との角度を算出し、算出された角度が小さいほど前記確率を高くする、
ことを特徴とする請求項1に記載の経路作成装置。
【請求項3】
前記検出手段が前記車両周辺の障害物の位置を検出し、
前記決定手段が、前記検出手段により検出された障害物の位置に基づいて前記車両と前記目標点との間に障害物が存在するか否かを判定し、前記車両と前記目標点との間に障害物が存在する場合には、そうでない場合よりも前記確率を低くする、
ことを特徴とする請求項1又は2に記載の経路作成装置。
【図1】

【図2】
【図3】

【図4】
【図5】

【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2011−112627(P2011−112627A)
【公開日】平成23年6月9日(2011.6.9)
【国際特許分類】
【出願番号】特願2009−272207(P2009−272207)
【出願日】平成21年11月30日(2009.11.30)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成23年6月9日(2011.6.9)
【国際特許分類】
【出願日】平成21年11月30日(2009.11.30)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]