
Fターム[2F129BB02]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 絶対位置測位 (12,751) | 人工衛星 (10,969)
Fターム[2F129BB02]の下位に属するFターム
Fターム[2F129BB02]に分類される特許
1 - 20 / 73
AISメッセージを検出するための方法
【課題】AIS送信機の地域マップまたは世界マップを作成するために、衛星によるAISメッセージの検出を改善すること
【解決手段】AISメッセージを検出するための方法は、少なくとも1つのAISチャンネルにて衛星によって受信された信号を示すデジタルデータを提供するステップと、デジタルデータとフラグメント状疑似メッセージとを相関化することにより、デジタルデータ内の候補メッセージを識別するステップ(E18)とを含む。フラグメント状疑似メッセージは、送信時間および/または送信機の位置に依存し、AIS送信機のデータベース(26)の支援により決定される少なくとも1つのAISメッセージフラグメントを含む。
(もっと読む)
視覚ステークアウト

【課題】全地球ナビゲーション衛星システムを提供する。
【解決手段】ライブ画像において関心の地点をマーク付けるためのコンピュータ実装方法であって、方法は、衛星から受信されたナビゲーション信号に基づいてナビゲーションデバイスの位置を決定することと、デバイスの配向センサーからのデータに基づいてデバイスの配向を決定することと、関心の地点の位置を得ることと、デバイスの第1のカメラから第1のライブ画像700を得ることと、デバイスのディスプレイ上に第1のライブ画像を表示することと、第1のライブ画像において、第1のライブ画像における関心の地点の第1の位置704を示す第1のマーカー702を表示することと、第2のライブ画像を得ることと、デバイスのディスプレイ上に第2のライブ画像を表示することと、第2のライブ画像において、第2のライブ画像における関心の地点の第2の位置を示す第2のマーカーを表示することとを含む。
(もっと読む)
位置の確認
【課題】測位の計算量および電力消費を最小化しつつ、最も可能性が高い候補(または複数の候補)を迅速に選択することができる電子デバイスの位置の指標を決定する方法を提供する。
【解決手段】デバイスによって、衛星測位システムの1つまたは複数の衛星から送信された無線信号を受信し、無線信号に関する情報を得る。この情報から、信号が受信された時のデバイスの真の位置に関して、複数の仮定を得る。無線信号に関する情報と仮定との間の一致度を評価して、評価の結果に基づき、仮定のうちの1つまたは複数を選択する。選択された1つまたは複数の仮定の指標を出力する。
(もっと読む)
移動距離算出装置、移動距離算出システム、移動距離算出プログラム、及び移動距離算出方法
【課題】複数の移動距離算出装置で計測対象の移動距離を計測する移動距離算出システムであって、省エネルギー性に優れ、障害にも耐性のある構成を提供する。
【解決手段】移動距離算出システムを構成するプロッタ装置11a〜11cは、記憶部と、通信部と、制御部と、を備える。記憶部は、移動距離の計測の開始時刻と、計測中の所定の時刻又は計測終了時の時刻である計測時刻と、開始時刻から計測時刻までの間に計測対象が移動した距離と、を含む情報である計測情報を記憶する。通信部は、計測情報をプロッタ装置11a〜11c同士で送受信する。制御部は、通信部が受信した計測情報を記憶部に記憶し、当該記憶部が記憶する計測情報を、開始時刻及び計測時刻に基づいて重複する計測情報を除外しつつ移動距離を積算することで、計測対象の総移動距離を算出する。
(もっと読む)
情報処理装置、情報処理方法、プログラム、及び記録媒体
【課題】徒歩時の自律航法に用いられる対応テーブルの精度を向上することのできる情報処理装置、情報処理方法、プログラム、及び記録媒体を提供する。
【解決手段】情報処理装置は、ユーザの絶対位置を取得する絶対位置取得部と、歩行する上記ユーザの身体の動きに応じた第1の値を取得する取得部と、上記第1の値、及び上記ユーザの歩幅又は歩行速度を示す第2の値の間の関係を示す関数を仮定し、上記第1の値及び上記絶対位置に基づいて上記関数に含まれる係数を算出することにより上記関数を特定する関数特定部と、上記関数を用いて、上記第1の値に対応する上記第2の値を算出する算出部と、算出される上記第2の値を用いて、上記ユーザの歩行テンポと上記第2の値との対応関係を学習する学習部と、を有する。
(もっと読む)
電気車両ネットワーク
【課題】車両のバッテリを交換および/または充電できるバッテリサービスステーションのネットワークを提供する。
【解決手段】車両102の1つまたは複数の車輪を駆動し、かつバッテリによって電力を供給される電気モータ103を含む電気車両である。電気車両は、車両のバッテリ104の状態および車両の地理的位置を判定する。次に、電気車両は、車両のバッテリの充電状態および車両の地理的位置に基づいて、車両が到達できる少なくとも1つのバッテリサービスステーション132を識別する。電気車両は、その少なくとも1つのバッテリサービスステーションを車両のユーザに表示する。
(もっと読む)
ナビゲーション装置
【課題】目的地又は経路周辺の施設に関する情報を車両の走行中に出力可能で、しかも、そのような情報の出力が中断するのを抑制可能なナビゲーション装置を提供すること。
【解決手段】ナビゲーション装置は、複数の施設情報の中に未出力の施設情報がある場合(425:NO)、次の道案内情報出力までの空き時間を算出し(S430)、次の道案内情報出力までの空き時間>出力時間となる未出力の施設情報があれば(S435:YES)、次の道案内情報出力までの空き時間>出力時間となる未出力の施設情報の中で出力時間×優先度係数が最大となる施設情報を選択、出力する(S440)。したがって、道案内情報の出力が必要となる区間以外の区間を対象区間として、その対象区間の走行期間に施設情報の出力を完了することができる。
(もっと読む)
車両用制御装置
【課題】どのような車両操作により所定の走行制御が実行され易くなるかということを把握できる情報を提示することができる車両用制御装置を提供する。
【解決手段】表示部76は、走行データが蓄積された履歴情報DThisから現在の車両状態に基づいて、惰性走行制御(所定の走行制御)が実行されると予測されるということを、車両6の現在位置を基準とした所定範囲内の走行路に関連付けて表示装置64に表示する。従って、運転者が現在の車両状態を変化させれば、惰性走行制御が実行されると予測される走行路が変化して表示されるので、電子制御装置60は、どのような車両操作により惰性走行制御が実行され易くなるかということを把握できる情報を、運転者に対して提示することができる。そうなれば、例えば運転者は上記惰性走行制御による燃費向上というメリットを意識的に引き出すように、車両6を走行させることが可能である。
(もっと読む)
掘削機械の表示システム及びその制御方法。
【課題】本発明の課題は、案内画面に表示される表示対象面と掘削機械との位置関係を容易に把握することができる掘削機械の表示システム及びその制御方法を提供することにある。
【解決手段】掘削機械の表示システムでは、上部境界線Laの位置と下部境界線Lbの位置とが算出される。上部境界線Laは、表示対象面78の断面の上端の高さ位置を示す。下部境界線Lbは、表示対象面78の断面の下端の高さ位置を示す。掘削機械の現在位置Poと、上部境界線Laあるいは下部境界線Lbとの上下方向の位置関係によって、表示範囲の基準点Pbが設定される。
(もっと読む)
電気車両ネットワーク
【課題】バッテリによって電力を供給される電気モータを含む電気車両のバッテリを素早く交換可能とする。
【解決手段】車両の1つまたは複数の車輪を駆動し、かつバッテリによって電力を供給される電気モータを含む電気車両において、バッテリの状態および車両の地理的位置を判定する。電気車両は、車両のバッテリの充電状態および車両の地理的位置に基づいて車両が到達できる少なくとも1つのバッテリサービスステーションを識別して、その少なくとも1つのバッテリサービスステーションを車両のユーザに表示する。
(もっと読む)
地域識別装置、および地域識別プログラム
【課題】車両に搭載され、自車両が走行する地域を識別する地域識別装置、および地域識別プログラムにおいて、自車両周囲の文字や記号が使用されている地域を精度よく特定できるような技術を提供する。
【解決手段】現在地識別装置1においては、自車両周囲の撮像画像に含まれる文字または記号を表す特定対象物を抽出し、複数の文字または記号が有するそれぞれの特徴と各文字または記号に対応する地域とを対応付けたデータベースを検索することによって、抽出した特定対象物がデータベース中の文字または記号である確度を演算する(S410〜S430)。抽出した特定対象物において、前述の確度が最大となり、かつ基準となる確度以上となるデータベース中の文字または記号を選択し、この選択した文字または記号に対応する地域をデータベースから抽出し、この抽出した地域を自車両が走行する地域として識別する(S450〜S480)。
(もっと読む)
移動体測位装置
【課題】マルチパスの影響を低減し、位置精度を向上させることができる移動体測位装置を提供する。
【解決手段】画像処理部30において、カメラ20で取得した画像から抽出した建築物5の第1位置及び第2位置における所定の水平の基準線から建築物5の最上部までの画像上の仰角θ1、θ2を算出する。そして、測位演算制御部50において、第1位置と第2位置間の距離及び第1位置及び第2位置における建築物5の画像上の仰角θ1、θ2から建築物5の実際の高さHを算出する。算出した建築物5の実際の高さHと第2位置において、GNSS受信機10で取得したGNSS衛星の位置情報とに基づき、建築物5が、GNSS衛星からの電波を受信する際に障害になるか否かを判定し、障害になると判定した場合には、当該GNSS衛星から受信している電波をマルチパスと判定して、受信した電波の情報を用いないで測位演算を行う。
(もっと読む)
マルチセンサデータの収集/処理
【課題】加速度、角速度、磁界センサ等のマルチプルセンサからのセンサデータを収集し、および/または処理する。
【解決手段】マルチセンサ計測処理ユニット300が付随する加速度計340と、マルチセンサ計測処理ユニット300に接続される外部の幾何学センサ370を備え、マルチセンサ計測処理ユニット300が、加速度計340および幾何学センサ370からのセンサデータに基づいて動きを検出し、加速度計340からの横揺れおよび縦揺れのセンサデータに基づいて幾何学センサ370の傾きを補償する。
(もっと読む)
マルチセンサデータの収集/処理
【課題】加速度、角速度、磁界センサ等のマルチプルセンサからのセンサデータを収集し、および/または処理する。
【解決手段】プロセサ120と、プロセサに接続される1以上のセンサ130、140と、プロセサに接続され、外部センサからの計測情報を受信する無線インターフェースユニット110を備え、プロセサは計測情報に基づいて1以上のナビゲーション状態を評価することに用いられるマルチセンサ計測処理ユニット100。
(もっと読む)
地上装置
【課題】航空機が送信する信号に含まれる位置情報から、容易な構成で正確に自装置の位置を特定する。
【解決手段】距離特定手段と、位置特定手段とを備える。距離特定手段は、第1信号を送信した航空機の位置である第1送信位置から前記地上装置までの距離と、第1送信位置から移動後に第2信号を送信した当該航空機の位置である第2送信位置から前記地上装置までの距離とをそれぞれ求める。位置特定手段は、前記距離特定手段によって、航空機と前記地上装置との距離が複数求められると、求められた複数の距離を用いて当該地上装置の位置を特定する。
(もっと読む)
推測航法を使用して車両の位置及び方位を追跡する方法並びにその方法を実行する追跡装置
【課題】本発明の目的は、請求項1に記載の前提部に従う車両の位置及び方位を記録する方法の精度の改良を提供することである。
【解決手段】前輪(3a)及び(3b)の速度に基づく推測航法を使用して車両の位置(xref)及び方位(H)を追跡する方法であって、前輪(3a)及び(3b)の速度v及び方位変化hから演算される近似的なかじ取り角δapp及び正確なかじ取り角δexを演算し、正確なかじ取り角δexからの逸脱が小さい場合には簡単な公式で算出される近似的なかじ取り角δappを使用し、逸脱が大きい場合には正確なかじ取り角δexを使用して、車両の位置(xref)及び方位(H)を追跡する方法。
(もっと読む)
ナビゲーション装置、ナビゲーションシステム及びナビゲーションシステムにおける経路算出方法
【課題】他車両による充電スポットの利用予定を考慮して、自車両が充電スポットを利用するタイミングが重ならないように経路及び充電スポットを設定することのできるナビゲーションシステムを提供する。
【解決手段】本発明のナビゲーションシステム1は、クライアント端末10とセンタサーバ20とを備え、クライアント端末10が自車両に関する車両情報をセンタサーバ20に送信して目的地までの経路検索を要求すると、センタサーバ20は自車両の現在地から目的地までの経路を算出して充電が必要な場合には、充電スポットを経由地として検索し、自車両が充電スポットに到着する到着予定時刻と充電スポットにおける充電予定時間と他車両による充電スポットの利用予定とを考慮して、自車両の充電スポットにおける利用予定及び自車両の目的地までの経路を設定することを特徴とする。
(もっと読む)
マップデータを使用する乗物ESCシステムのための方法及びシステム
【課題】乗物用の改良型電子安定性制御システムを提供する。
【解決手段】乗物用の電子安定性制御(ESC)システムが開示される。電子制御ユニット(ECU)は、乗物のブレーキ及びスロットルの動作に変更を加えることで、意図された乗物方向及び/又はヨーレートと、実際の乗物方向及び/又はヨーレートとの間の差を減少することにより、乗物の横滑りを減少するようにプログラムされる。ESCシステムは、車輪速度センサ、ハンドル位置センサ、ヨーレートセンサ、及び横方向加速度センサから入力を受け取る。又、ESCシステムは、乗物が位置している道路の特性を少なくとも指示する入力も受け取り、乗物が位置する道路は、マップデータベースを使用するポジショニングシステムから決定され、又、特性は、マップデータベースから決定される。
(もっと読む)
ナビゲーション又はマッピング装置及び方法
マルチコンステレーション全地球航法衛星システム補強及び支援
マルチコンステレーションGNSS補強及び支援システムは、複数の基準局を含むことができる。各基準局は、ナビゲーションデータを複数の異なる全地球航法衛星システムから受信し、そして各異なる全地球航法衛星システムに関するインテグリティデータ及び性能データを監視するように適合させることができる。オペレーションセンターは、前記複数の基準局の各基準局から送信される前記インテグリティデータ及び性能データを受信することができる。通信ネットワークは、前記オペレーションセンターからのメッセージを、ユーザのnavcom機器に送信して前記navcom機器を補強し、そして支援することができる。 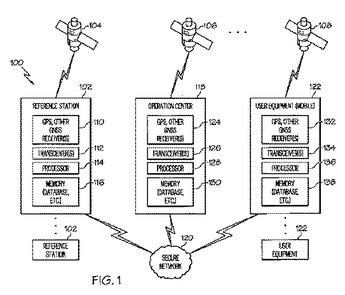 (もっと読む)
(もっと読む)
1 - 20 / 73
[ Back to top ]