
Fターム[3H131BA12]の内容
非容積形送風機 (1,972) | 真空ポンプの構成の目的 (607) | 制御 (89) | フィードバックするもの (11)
Fターム[3H131BA12]に分類される特許
1 - 11 / 11
ターボ分子ポンプ
【課題】真空チャンバーの漏れ(リーク)の有無を判定するためには、ターボ分子ポンプの稼働を停止させてリークディテクタを接続しなければならないので、余分な手間を招来するという問題があった。
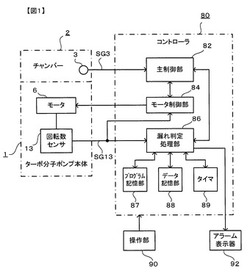
【解決手段】モータ制御部84は、ブラシレスモータ6に供給する電流を一定値に維持する。タイマ89は、モータ制御部84により一定の電流値が維持されている期間中の時間を計測する。回転数センサ13は、モータ制御部84により一定の電流値が維持されている期間中のモータ回転速度を測定する。漏れ判定処理部86は、タイマ89により計測された時間と、回転数センサ13により測定された最大回転速度と最小回転速度との回転速度差とに基づいて、ターボ分子ポンプ吸気口側に接続されている真空チャンバー2の漏れ判定を行う。
(もっと読む)
ターボ分子ポンプ

【課題】ロータの、特に該ロータの一部を構成する回転軸を効果的に冷却し、例えば動翼と該動翼に対向して配置される静翼との間のクリアランスが変化して、排気性能が変化するような時に、警報を発するか、またはポンプ運転を停止して、ポンプを保護できるようにする。
【解決手段】磁気軸受50,52,58によりロータを磁気浮上させ、該ロータをモータ12により高速回転させて気体を排気するターボ分子ポンプにおいて、磁気軸受50,52,58に冷却用気体を導入する冷却用気体導入部64と、磁気軸受に導入される冷却用気体の圧力を検出する圧力検出部68とを備え、ポンプ運転中に圧力検出部68で検出された圧力が規定圧力以下になった時に、警報を発すか、またはポンプ運転を停止する。
(もっと読む)
ターボ分子ポンプ
【課題】 冷却水の供給量の最適化をはかり省エネルギー化に貢献するターボ分子ポンプTPを提供する。
【解決手段】 ターボ分子ポンプTPへ冷却水CWを供給する配管8に直列的に、温度により開度が変化する流温感知弁Vがターボ分子ポンプTPに密着して設置されている。この流温感知弁Vのハウジング11内に線膨張係数の大きなワックスWXが封入され、ワックスWXの熱膨張を利用して流路12の開閉を行う。流温感知弁Vの内方の弁体14は摺動可能で弁体14は下方に付勢されるが、ワックスWXが封入された拡縮体20による付勢力がターボ分子ポンプTPの温度に相応するワックスWXの膨張量で発生する。ハウジング11に規制ピン21が植設され、ターボ分子ポンプTPの温度が下降してワックスWXが収縮したとき、バネ15にて弁体14が下方に押されるとき、弁体14が流路12を完全に閉塞しないで最少量の流量を維持させるよう付勢が制限される。
(もっと読む)
真空ポンプ
【課題】キュリー温度付近における磁性体の透磁率変化を利用して、ロータ温度を広い範囲で連続的に検出することができる真空ポンプの提供。
【解決手段】ナット42の底面側に設けられたターゲット81,82は、ロータの監視温度範囲内においてキュリー温度が異なる複数の磁性材料の粉末または小片を樹脂等で固化したものである。ギャップセンサ44がターゲット81,82に対向すると、複数の磁性材料の透磁率をインダクタンスとして検出することができる。そのため、ロータ温度が上昇してそれぞれのキュリー温度を順に越えると、インダクタンスは徐々に低下する。その結果、インダクタンスの値から、容易にロータ温度を算出することができる。
(もっと読む)
制振装置及び制振方法
【課題】磁気軸受の姿勢の自由度を活用して、高次の振動モードを制振可能とし、真空機器である真空ポンプを、制振機器としても活用し、この真空ポンプを使用してなる装置の精度及び生産性に寄与した制振装置及び制振方法を提供する。
【解決手段】第1の振動センサ及び第2の振動センサで検出された振動信号を基に傾斜方向振動成分と並進方向振動成分とを分離し、傾斜方向振動成分を傾斜方向信号補償手段で信号補償された出力信号に対し加算して傾斜方向信号を生成し、並進方向振動成分を並進方向信号補償手段で信号補償された出力信号に対し加算して並進方向信号を生成し、並進方向信号及び傾斜方向信号を基に第1の位置センサに対応して配置された第1の径方向電磁石を駆動し、及び第2の位置センサに対応して配置された第2の径方向電磁石を駆動する。
(もっと読む)
軸受装置、及びターボ分子ポンプ
【課題】非磁性体からなる転動体を備えた保護ベアリングにおいて、磁化された内輪の連れ回りを抑制すること。
【解決手段】内輪41及び外輪42は、磁性体の部材により形成され、転動体43は、非磁性体により形成されている。磁気誘導体44は、磁性材により形成された部材であり、磁化された内輪の磁気を、内輪と外輪を通る閉磁路へ誘導する磁気誘導機能を備える。磁気誘導部44bは、軸受固定部44aの内周縁部から、軸受固定部の延長方向及び軸方向に張り出した部位から構成され、より磁気抵抗が小さくなるように外輪と接触されている。保護ベアリングの内輪と磁気誘導部との隙間の間隔βは、内輪の内周面とシャフト7の外周壁面との隙間の間隔αと比較して十分に小さくなるように構成されている。このように、間隔β<間隔αとなるように磁気誘導体を設けることにより、より多くの磁束を拾い、内輪と外輪を通る閉磁路へ誘導することができる。
(もっと読む)
真空ポンプ
【課題】コストアップを抑えつつ、温度判定精度の向上を図ることができる真空ポンプの提供。
【解決手段】真空ポンプのシャフト3に設けられたナット42には、ロータ2の温度監視範囲内にキュリー温度がある磁性体ターゲット81が設けられている。ナット42の底面は段差が形成されて2つの固定面42a,42bを有し、磁性体ターゲット81は一方の固定面42aに設けられている。ギャップセンサが固定面42a,42bに対向したときのセンサ出力の差分を用いて、ギャップセンサが磁性体ターゲット81に対向したときのセンサ出力を除算し、除算後の値を判定に用いることにより、シャフト3の浮上位置に影響されずロータ温度判定を行うことができる。
(もっと読む)
高速回転式の真空ポンプ
本発明は、圧縮機(12)と、該圧縮機(12)を駆動するための駆動モータ(14)と、該駆動モータ(14)を一定の定格回転周波数で運転するためのモータ制御装置(16;32)とを備えた高速回転式の真空ポンプ(10)に関する。周辺条件に関連して、圧縮機を定格回転周波数で運転する場合は不都合に激しい振動が圧縮機(12)に発生する可能性があり、この振動によって軸受けが過剰に負荷される。従って本発明の課題は、圧縮機若しくは真空ポンプの振動負荷を減少させることである。この課題は本発明に基づいて、モータ制御装置(16;32)に作動可能な回転周波数補正装置(18;34)が対応配置されており、該回転周波数補正装置(18;34)が作動すると、定格回転周波数をコンスタントに、該定格回転周波数の最大10%の回転周波数補正値だけ補正することによって解決される。これにより、圧縮機(12)若しくは真空ポンプ(10)の極端に激しい固有振動が発生した場合に、駆動モータ(14)の回転周波数を、共振作用等が防止され得るように簡単に変化させる手段が得られる。  (もっと読む)
(もっと読む)
磁気軸受装置及び該磁気軸受装置が搭載されたターボ分子ポンプ
【課題】 電磁石から位置センサへの磁束の漏れによる影響を防止することで磁気シールド板が省略された磁気軸受装置及び該磁気軸受装置が搭載されたターボ分子ポンプを提供する。
【解決手段】 電磁石105Y−を構成する一方の磁極(N極)から出た磁束は他方の磁極(S極)へ流入される。同様に、この電磁石105Y−の一方の磁極(N極)から出た磁束は、隣接する電磁石105X−のS極へ流入される。このため、従来のように、漏れ磁束が下側径方向センサ108側に流入することは無くなる。このことにより、位相余裕度は高くなり、ロータ軸113が発振し難くなる。このため、剛体モードの共振点がこの位相範囲内に存在していても安定した運転ができる。そして、この際には、磁気シールド板200を省略することができる。従って、ターボ分子ポンプのコストダウンに繋がる。
(もっと読む)
ターボ分子ポンプの電源装置
【課題】 新しいポンプ制御プログラムによるポンプ本体の制御に容易に対応することができるターボ分子ポンプの電源装置。
【解決手段】 CPU10で処理されるプログラムは、互いに独立した機種依存プログラム(ポンプ制御プログラム)とローダプログラムとから成る。機種依存プログラムは、励磁アンプ11およびインバータ12を制御するためのプログラムである。ローダプログラムは、不揮発性メモリ13に格納されている機種依存プログラムを通信ポート17を介してPCから送信された機種依存プログラムで書き換えるためのプログラムである。LCD/スイッチ15により書き換えモードに設定されると、機種依存プログラムの書き換えが行われる。同一の電源装置2であっても、機種依存プログラムの書き換えを行うことにより種々のポンプ本体1に対応することができる。
(もっと読む)
ターボ分子ポンプの温度制御装置
【課題】 ターボ分子ポンプのポンプ温度を、様々なガス負荷状況に対応することができるように制御することができる温度制御装置の提供。
【解決手段】 温度設定部8はモータ制御部5からの電流積算値に基づいてターボ分子ポンプの回転体の温度が所定値以上か否かを判断し、ターボ分子ポンプの回転体の温度が所定値以上の場合には予め定められた下限値を下限に目標温度Ttを低くし、ターボ分子ポンプの回転体の温度が所定値より小さい場合には予め定められた上限値を上限に目標温度Ttを高くする。そして、その目標温度Ttは温度制御部7に入力され、温度制御部7は目標温度Ttと温度センサ31の検出値とに基づいてヒータ29および冷却装置30を制御し、ポンプ温度を目標温度Ttとするように温度制御する。
(もっと読む)
1 - 11 / 11
[ Back to top ]