
Fターム[3J053DA22]の内容
流体伝動装置の制御 (6,334) | 入力信号 (2,017) | マニュアル操作装置(例;手動、足動) (198) | 操向装置 (26)
Fターム[3J053DA22]に分類される特許
1 - 20 / 26
作業車両
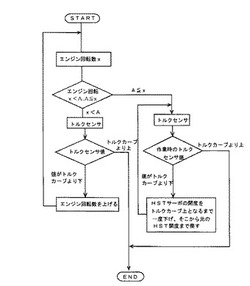
【課題】エンジンの出力特性に合致するようエンジン回転数やHST開度を自動調節する機構を備えた作業車両を提供すること。
【解決手段】エンジン回転数の上昇だけで予め設定されているエンジン回転数とエンジントルクの関係を示す適切な出力特性となるトルクが得られない場合にHSTサーボアクチュエータ30を作動させて油圧式無段変速装置(HST)の開度を下げて、適切な出力特性となるトルクを得て、その後再びHSTサーボアクチュエータ30を作動させてHST23の開度を設定した開度に戻す制御構成を有する制御装置100を設けた作業車両であり、エンジントルクと回転数が予め設定された適切なトルク対回転数の出力特性と比較し、エンジン回転数を前記出力特性に合致する値に変更する制御構成としたことにより、自動的に燃費が良い状態に維持されるので、燃費が従来より向上する。
(もっと読む)
作業機械

【課題】高速直進走行からターン操作する際に、ターン操作の開始時点において高速から低速へ減速させることができる作業機械の提供。
【解決手段】本発明は、左走行レバー11の操作を検出する第1リミットスイッチ13と、右走行レバー12の操作を検出する第2リミットスイッチ14と共に、第1リミットスイッチ13から出力される信号、及び第2リミットスイッチ14から出力される信号に基づいて、左走行レバー11及び右走行レバー12の操作によって走行体1のステアリング操作が実施されようとしているかどうか判定する操作状態判定手段28bを含み、ステアリング操作が実施されようとしていると判定されたときに、左走行モータ23及び右走行モータ24の容量を制御する容量制御弁30に、左走行モータ23及び右走行モータ24を低速駆動させる容量に制御する制御信号を出力するコントローラ28を備えている。
(もっと読む)
電動操作型油圧アクチュエータユニット及び油圧四輪駆動作業車輌
【課題】電動モータによる容積調整機構の作動を許容しつつ、容積調整機構や油圧アクチュエータに加わった外力によって油圧アクチュエータの容積が意に反して変化するのを防止できる電動操作型油圧アクチュエータユニット及び油圧四輪駆動作業車輌を提供する。
【解決手段】電動モータにより軸線周りに回転される駆動側アーム361と、駆動側アームよって軸線周りに回転され且つ容積調整機構に作動連結された従動側アーム363と、前記両アームを囲繞するクラッチケース362と、駆動側アームにより従動側アームとともに軸線周りに回転されるようにクラッチケースに収容されたコンタクト部材364とを有し、電動モータの出力停止時に容積調整機構からの力により従動側アームが軸線周りに押圧されると従動側アームがコンタクト部材をクラッチケースに押し付けて従動側アームの回転がロックされるクラッチ機構を容積調整機構と電動モータとの間に介挿した。
(もっと読む)
苗移植機
【課題】本発明では、作業時の燃料消費を抑えた、低燃費の苗移植機を提供することを課題とする。
【解決手段】
走行車体2にエンジン20と油圧無段変速装置23を設け、走行車体2の後部に圃場に苗を植え付ける苗植付装置52を設け、油圧無段変速装置23の出力を切り替えて機体の前後進及び走行速度を操作する変速操作レバー8を設けた苗移植機において、油圧無段変速装置23に駆動容量を変更可能な可変アクチュエータ29を設け、走行車体2の走行状態を検知する第1走行検知部材14と第2走行検知部材9を設け、第1走行検知部材14の検知する走行状態に合わせて可変アクチュエータ29の駆動容量とエンジン20の回転数を制御する制御装置6を設けて構成する。
(もっと読む)
コンバイン
【課題】制御性およびメンテナンス性を向上させるとともに目標走行速度にかかわらず違和感や不快感が発生しない運転操作が可能なコンバインの提供を目的とする。
【解決手段】制御手段200は、変速操作具25の操作量を検知する操作量検知手段25aと、走行用油圧式無段変速装置40の走行回転数を検知する走行回転数検知手段108と、が接続され、変速操作具25の操作量から算出される目標走行速度Vtと走行用油圧式無段変速装置40の走行回転数から算出される走行速度Vrとの速度偏差Vsを減少させるために、当該速度偏差Vsと走行制御ゲインG1とから算出される走行斜板角度補正値Vθmを目標走行速度Vtに加算して算出される速度指令値Vによって走行用油圧式無段変速装置40を制御する構成であって、走行制御ゲインG1は、目標走行速度Vtが第一設定速度V1以下では0とすることを特徴とするものである。
(もっと読む)
車両の制御装置
【課題】高速降坂走行時の旋回運動に起因するステアリングブレーキの損傷を防止することができる車両の制御装置を提供する。
【解決手段】例えばブルドーザ1の車体コントローラ70はブレーキプロテクト制御部70cを有し、ブレーキプロテクト制御部70cは、ロックアップクラッチ16の係合によりトルクコンバータ9におけるポンプインペラ9aとタービンランナ9bとが結合された状態のロックアップモードで、ブルドーザ1が第1所定傾斜角度θ1以上での降坂走行状態にあることが検出され(ステップS2〜ステップS3)、かつ操向レバー55が左旋回操作または右旋回操作されていることが検出されたとき(ステップS4)、ロックアップクラッチ16の係合解除を指令するロックアップクラッチ係合解除指令信号CLOFFを変速制御部70bに向けて出力する(ステップS5)ものとする。
(もっと読む)
油圧駆動車両
【課題】第一及び第二フレームにそれぞれ支持され且つ可変容積型第一油圧モータ及び固定容積型第二油圧モータによってそれぞれ駆動される第一及び第二車輪間に旋回半径差が生じるアーティキュレート型油圧駆動車両において、第一油圧モータに特別な構造を備えることなく、旋回半径差を補償する。
【解決手段】 第二フレームにカム面を有するカム押動部材が相対移動不能に設けられ、第一フレームに枢支軸回り相対移動不能且つ第1方向相対移動可能にカム従動部材が設けられる。カム面は、第一及び第二フレームの枢支軸回りの揺動量に応じた量だけカム従動部材が第1方向に移動するように構成され、カム従動部材の第1方向の動きを利用して第一油圧モータの容積量を増減する。
(もっと読む)
油圧駆動作業車両
【課題】可変油圧ポンプと直列的に流体接続された可変第一及び固定第二油圧モータによって前後の第一及び第二車輪がそれぞれ駆動可能とされた車両において、走行速度の可変領域幅を拡大させる。
【解決手段】ポンプ/第二モータライン及び第二モータ/第一モータラインの間を連通又は遮断させるバイパス弁を備え、バイパス弁が両ラインの間を遮断させる際には第一油圧モータの容積を該第一油圧モータによって駆動される第一車輪の周速が第二油圧モータによって駆動される第二車輪の周速と略同一となる際の基準容積に設定し且つバイパス弁が両ラインの間を連通する際には第一油圧モータの容積を基準容積より小さい第一容積に設定する。
(もっと読む)
作業車輌
【課題】走行操作部材の操作量に応じて前記走行HSTの出力制御が行われる作業車輌であって、走行HSTの製造誤差及び組み付け誤差に拘わらず、走行HSTの出力調整部材における中立位置の設定を容易且つ確実に行うことができる作業車輌を提供する。
【解決手段】制御装置270は、初期設定モードにおいて中立位置設定モードを実行することにより、走行HST102を前進側及び後進側に駆動させた上で、走行HST102の出力が前進側中立位置及び後進側中立位置となるように走行アクチュエータ210を作動させ、その時点での出力調整部材108の作動位置をそれぞれ記憶し、前記前進側中立位置及び前記後進側中立位置の平均値を中立位置として記憶する。
(もっと読む)
走行車両
【課題】走行機体に搭載されたエンジンの動力を、油圧無段変速機50を介して左右の走行部に伝達するように構成され、主変速レバー13と操向ハンドル10と副変速レバー14とを備えた走行車両において、動力損失を大幅に低減できるようにする。
【解決手段】油圧無段変速機50の変速出力を調節する電動モータ151,161と、電動モータ151,161の駆動を制御するコントローラ170と、変速出力パターンを予め記憶させたPROM172とを備える。コントローラ170は、左右の走行クローラの速度が操向位置センサ117及び主変速位置センサ135の検出情報と副変速レバー14の操作状態に対応して選択された変速出力パターンとから得られた値になるように、直進電動モータ151及び旋回電動モータ161を駆動させて油圧無段変速機50の変速出力を調節する。
(もっと読む)
走行車両
【課題】走行機体に搭載されたエンジンの動力を、油圧無段変速機50を介して左右の走行部に伝達するように構成され、走行機体の直進速度を変更操作する主変速レバー13と、走行機体の進行方向を変更操作する操向ハンドル10とを備えている走行車両において、動力損失を大幅に低減できるようにする。
【解決手段】油圧無段変速機50の変速出力を調節する電動モータ151,161と、電動モータ151,161の駆動を制御するコントローラ170と、変速出力パターンを予め記憶させたPROM172とを備える。コントローラ170は、左右の走行クローラの速度が操向位置センサ117及び主変速位置センサ135の検出情報と、変速出力パターンとから得られた値になるように、直進電動モータ151及び旋回電動モータ161を駆動させて油圧無段変速機50の変速出力を調節する。
(もっと読む)
作業車両
【課題】頻繁に前後進を繰り返しても前進時と後進時での走行速度を安全性を確保しながら作業能率を高めるように自動的に調整することができる作業車両を提供すること。
【解決手段】主変速レバー20の操作で油圧シリンダ93によりトラニオン軸92の回動角度を調整し、前後進レバー10でHST34を含む変速装置の出力を前進方向、中立又は後進方向に出力させ、前回における作業時間の一番長かった変速位置に副変速レバー21を操作したときの変速位置を前進時と後進時で別々のメモリ変速位置としてメモリ90aに記憶させておき、次回に前後進レバー10が前進側又は後進側に操作されると、制御装置90はそれぞれ前進時及び後進時に対応して別々に前記記憶したメモリ変速位置に変速装置を変速させるので、特に後進時には前後進レバー10を後進側に操作するだけで速い車速になり、オペレータの操作労力が軽減すると同時に作業効率も向上する。
(もっと読む)
作業車両
【課題】頻繁に前後進を繰り返しても前進時と後進時での走行速度を安全性を確保しながら作業能率を高めるように自動的に調整することができる作業車両を提供すること。
【解決手段】エンジン5の動力を主変速レバー20の操作で油圧シリンダ93でトラニオン軸92の回動角度を調整し、前後進レバー10でHST34を含む変速装置の出力を車両の前進方向、中立又は後進方向に出力させ、前後進レバー10で後進が設定された時にトラニオン軸92の回動角度の目標位置を前進時に設定されていた変速位置より高速段側に変更するためのバック優先スイッチ89を設けている。よって後進操作時にバック優先スイッチ89がオンであると従来のように前後進レバー10を後進側にセットしたときの後進増速操作に車速を変更する操作の煩わしさが無くなった。
(もっと読む)
コンバイン
【課題】双方が可変容積型とされた走行ポンプ及び走行モータを有する走行側HSTを備えたコンバインにおいて、刈取作業効率を向上させる。
【解決手段】走行モータを小容積状態に移行又は保持した状態で走行側HSTの出力を変速操作部材の操作位置に応じて変化させる小容積制御モードと、走行モータを大容積状態に移行又は保持した状態で走行側HSTの出力を変速操作部材の操作位置に応じて変化させる大容積制御モードと、走行モータの容積状態変更時に走行側HSTの出力が変化しないように走行ポンプの容積状態を変更させる移行制御モードとを含み、コンバインが作業状態の際には小容積制御モードが選択されるように構成する。
(もっと読む)
作業車両
【課題】走行機体1に搭載されたエンジン5からの動力を変速するための油圧式無段変速機80と、油圧式無段変速機80の変速出力を増減速操作するための変速ペダル18と、走行機体1を操向操作するための操向ハンドル体15とを備えた作業車両において、例えば田面に描かれたマーカ跡が運転部の座席に座ったオペレータから見えない又は見づらいために、作業車両を立ち姿勢で運転するに際して、走行機体の車速を変更・調節する操作がし難いという問題を解消する。
【解決手段】操向ハンドル体15又はその近傍に、油圧式無段変速機80の変速出力を増減速する操作と、変速出力を変速ペダル18のペダル位置に対応する値に保持する操作との2種類の操作が実行可能な車速調節レバー23を配置する。
(もっと読む)
作業車両の変速制御装置
【課題】オペレータの希望通りに加減速時の加速度を変更可能とし、運転時の操作フィーリングを向上させた作業車両を提供する。
【解決手段】無段変速装置(HST21)を具備し、速度を無段階に設定する主変速レバー3と、前進および後進を切り換えるリバーサレバー7と、を備える作業車両の変速制御装置(制御装置81)であって、主変速レバー3が操作されたときに、操作速度および操作量に応じて、変速時の加速度aおよびa´を制御する。
(もっと読む)
作業車輌
【課題】走行方向や走行速度を急操作した時に生じる走行直進制御の応答遅れによる走行曲がりを防止することができる作業車輌を提供する。
【解決手段】エンジンからの動力を左右のHST変速装置15、16を介して左右の走行装置に伝達し、かつ前記左右のHST変速装置15、16をステアリングハンドル11、主変速レバー12により操作して走行速度及び進行方向を変更するようにした作業車輌において、前記左右のHST変速装置15、16の少なくとも一方のポンプレバー15aを調整する調整用アクチュエータ17と、前記ステアリングハンドル11又は前記主変速レバー12の変化量が所定値以上に大きい場合、前記左右のHST変速装置15、16のポンプレバー15aとポンプレバー16aとの操作量の差が小さくなる方向に前記調整用アクチュエータ17を制御する急操作制御手段70を備えた。
(もっと読む)
クローラ走行車輌
【課題】HSTの左右油圧ポンプにそれぞれ備えた可動斜板の傾動状態を直進走行時に等しくし得る構成のクローラ走行車輌を提供する。
【解決手段】油圧補正バルブ20を、左右HST31,32の油圧ポンプ13a,13bと油圧モータ21a,21bの閉回路における主回路ではなく、主回路よりは低圧な、チャージポンプ17が発生する作動油圧をサーボシリンダ18a,18bに供給する部位に介設した。そのため、直進走行時には、油圧補正バルブ20の作動により、サーボシリンダ18a,18bの同じ作動方向側のシリンダ室49aと49b同士、及び50aと50b同士がそれぞれ連通するので、連動機構の誤差等に拘わらず直進性を向上でき、油圧補正バルブ20やその配管類に比較的小型で低価格なのものを採用できる。
(もっと読む)
油圧駆動式作業車両の走行安定装置
【課題】駆動力の配分を前側車軸と後側車軸とで適切に行い、直進安定性又は回頭性を実施上有効に高め得る油圧駆動式作業車両の走行安定装置を提供する。
【解決手段】油圧駆動式作業車両は、エンジンにより駆動される可変容量形油圧ポンプと、この油圧ポンプからの圧油を受けて回転する複数の可変容量形油圧モータ6とを備え、この各油圧モータの回転力により2軸以上の車軸1〜3に設けられた車輪4L,4Rが回転駆動される。この油圧駆動式作業車両の走行安定装置は、車両の走行状態を検出する走行状態検出手段41〜45と、この検出手段からの信号を受け、車両の走行状態に応じて上記複数の油圧モータのうち、少なくとも特定の油圧モータの容量を変更制御する制御手段46とを備える。
(もっと読む)
作業車の走行駆動装置
【課題】作業車において、前輪と後輪の走行速度を一致させて旋回を行う場合に、車輪の引きずりやスリップによって圃場面を傷めないようにする。
【解決手段】エンジンEの動力により駆動される第一の油圧ポンプP1と、ミッションケース1に動力を伝える第一の油圧モータM1を流体接続して閉回路を構成し、該第一の油圧モータM1の出力軸を変速装置に連動連結し、この変速後の出力を、一方は第一のデフ装置D1を介して主駆動輪5に動力を伝え、他方は第二の油圧ポンプP2を駆動し、該第二の油圧ポンプP2に流体接続した左右一対の油圧モータM3により左右それぞれの副駆動輪6を駆動するようにした。
(もっと読む)
1 - 20 / 26
[ Back to top ]