
Fターム[3J101FA25]の内容
Fターム[3J101FA25]に分類される特許
81 - 100 / 133
荷重測定装置

【課題】 エンコーダ4dの被検出面に対向させたセンサの出力信号の変化から、転がり軸受ユニットを構成する外輪とハブとの間に作用する荷重を求める為の演算を、少ない計算量で行なえる構造を実現する。
【解決手段】 上記エンコーダ4eの被検出面に存在するN極に着磁された部分とS極に着磁された部分との境界の形状を、所定の曲線形状とする。この様な構成を採用する事により、上記出力信号の変化量と上記荷重の変化量との間に直線関係を成立させる事で、上記課題を解決する。
(もっと読む)
スタビリティコントロール装置

【課題】 走行安定性をより向上させるべく、制御の応答性を向上させる事ができるスタビリティコントロール装置を、低コストで実現する。
【解決手段】 横方向荷重測定手段13が求める接地面での横方向荷重と、セルフアライニングトルク測定手段14が求めるセルフアライニングトルクとに基づいて制御器15が、操舵輪の横滑り角と上記接地面の摩擦係数とのうちの少なくとも一方を算出する。そして、上記制御器15が、この算出結果に基づいて、車両の走行安定性を確保する為の制御を行なう。
(もっと読む)
車輪用軸受装置
【課題】 回転検出用の被検出部または検出部が設けられたパルサリングやセンサキャップ等の支持用部品を嵌合させた軸受構成部材につき、疲れ強さや硬度の向上により、自動車の旋回時等の高応力が繰り返し作用し変形する場合でも、クリープの発生による摩耗を抑制することができて、異常検出が抑制できる車輪用軸受装置を提供する。
【解決手段】 内輪15と外輪となる外方部材2とを備えた外輪回転型の車輪用軸受装置において、外方部材2のインボード側の端部外周にパルサーリング41を取付ける。外方部材2のパルサーリング41が嵌合する部分の表面を非標準組織の部分30とする。非標準組織は、微細フェライト・パーライト組織、上部ベイナイト組織、下部ベイナイト組織、焼戻マルテンサイト組織のうちのいずれか、もしくは少なくともこれらの組織のうちの2種類以上の混合組織とする。内輪回転型の車輪用軸受装置では、外輪のセンサキャップの嵌合部を非標準組織の部分とする。
(もっと読む)
センサ付車輪用軸受
【課題】 車両にコンパクトに荷重検出用のセンサを設置できて、車輪にかかる荷重を検出でき、量産時のコストが安価となるセンサ付車輪用軸受を提供する。
【解決手段】 外方部材1と内方部材2の間に複列の転動体3を介在させた車輪用軸受において、センサユニット21を取付ける。センサユニット21は、固定側部材である外方部材1の内周面に取付けられるリング22と、このリング部材22の歪みを測定する複数の歪みセンサ23とでなる。なお、内方部材が固定側部材である場合は、内方部材に前記リングを取付ける。
(もっと読む)
センサ付き転がり軸受装置及び歪みセンサ
【課題】 転がり軸受装置に作用する予圧の測定精度が高く、更に低コスト化が可能なセンサ付き転がり軸受装置及び歪みセンサを得る。
【解決手段】 内輪2,3、外輪4、転動体5及び歪みセンサ6を有するセンサ付き転がり軸受1である。歪みセンサ6は、外輪4又は内輪2,3の表面に設けられている。歪みセンサ6は、絶縁性膜b及びこの絶縁性膜b上に設けられた導電配線dを有する。導電配線dは、金属薄膜よりなる複数の細線状の高抵抗部8を経路途中に有する。これら複数の高抵抗部8が軌道輪表面の複数位置に配置されている。
(もっと読む)
センサ付き転がり軸受装置
【課題】 転がり軸受装置の構成部材を利用した簡単な構成により車両に付加される荷重を検出することができセンサ付き転がり軸受装置を提供する。
【解決手段】 懸架装置に固定されるとともに、その内周面に複列の軌道面3を有する外輪部材4と、この外輪部材4の内径側において当該外輪部材4と同心に配置されるとともに、その外周面に複列の軌道面5を有する内輪部材6と、前記外輪部材4及び内輪部材6の各軌道面3、5間に転動自在に介装された転動体7と、前記外輪部材4に設けられた変位センサ15、17とを備えたセンサ付き転がり軸受装置1。前記変位センサ15、17は、前記転動体7の変位を検知し得るように当該転動体7と対向して配置されている。
(もっと読む)
転がり軸受装置
【課題】機器内部に組み込まれてかつ運転状態において、軸受自身の転がり抵抗を測定することができる転がり軸受装置を提供する。
【解決手段】内輪11及び外輪12と、これらの間に介在している第一の転動体13を備えている。外輪12は、相対回転可能な内環状部材2と外環状部材3と、これらの間に転動可能に介在している第二の転動体4を有している。内環状部材2と外環状部材3に形成された異形軌道面により、内環状部材2と外環状部材3とが相対回転すると相互間に所定の回動付勢力が付与されるように構成されている。外輪7はセンサ7を有しており、このセンサ7は、内環状部材2と外環状部材3の相対回転により生じる位相差を計測することで、相互間に生じているトルクを検出する。
(もっと読む)
ころ軸受におけるころの自転運動測定装置
【課題】 簡単な構造でころ本来の自転運動を正確に測定することができるころ軸受におけるころの自転運動測定装置を提供する。
【解決手段】 ころ軸受10における複数配列されたいずれかのころ13に、ころ端面の中心から突出させた羽根取付軸5を介して、ころ13の直径方向に延びる羽根2を取付ける。ころ13の自転運動検出用の手段として、前記羽根2の通過を検出する検出手段3を設ける。
(もっと読む)
センサ付き転がり軸受装置
【課題】 簡単な構成によって回転状態における転がり軸受の異常判断が可能なセンサ付き転がり軸受装置を提供する。
【解決手段】 センサ装置2は、固定側軌道部材3の180°離れた位置に配置された1対の回転数センサ9,10と、各回転数センサ9,10の出力を処理する処理手段31とを備えている。処理手段31は、1対の回転数センサ9,10の出力の位相差の変化を求める位相差変化量演算手段32と、位相差変化量演算手段32で得られた位相差変化量と基準値とを比較して位相差変化量から振動量の正常または異常を判定する振動判定手段33とを有している。
(もっと読む)
ころがり要素軸受に作用する接触力ベクトルを決定するための方法及びそのためのセンサ装置
運転中のころがり要素軸受(1)に作用する接触力ベクトルを決定するための方法そして装置である。センサ信号は、ころがり要素軸受(1)の運転特性を測定す複数のセンサ(8)から得られる。複数のセンサ信号は接触力ベクトルを決定するために処理される。複数のセンサ(8)は、軸受の部材の変形を測定するように配され、処理の工程は、ころがり要素軸受(1)を表わす有限要素解析モデルの逆変換を用いて接触力ベクトルを決定する工程を含む。有限要素解析モデルは、少なくとも一つの一般化モード形を用いて簡単化され、少なくとも一つの一般化モード形は、内輪(6)あるいは外輪(5)のようなころがり要素軸受(1)の部材の自然モード変形の数学的表記である。 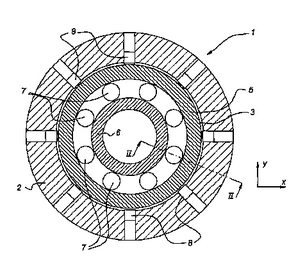 (もっと読む)
(もっと読む)
荷重測定装置付転がり軸受ユニット
【課題】 転がり軸受ユニットに組み付ける荷重測定装置の低コスト化、強度確保、小型・軽量化を極限迄追求できる構造を実現する。
【解決手段】 1対のセンサ23a、23bの検出部を、軸方向に関して位相を漸次変化させたエンコーダ31の被検出面に対向させる。そして、演算器24が、上記両センサ23a、23bの出力信号の位相差に基づいて、外輪1とハブ11との間に作用するアキシアル荷重を求める。上記両センサ23a、23bと上記演算器24とを、単一のケーシング25内に収納する。又、この演算器24から送り出される荷重信号を、CANバスにより送信する。この構成により、上記課題を解決する。
(もっと読む)
転がり軸受ユニットの変位測定装置及び荷重測定装置
【課題】比較的簡単な構成で、互いに異なる2方向の変位又は荷重を測定できる変位測定装置及び荷重測定装置を実現する。
【解決手段】外輪3に支持したセンサユニット22に保持した1対のセンサ24a、24bを、ハブ4に外嵌固定したエンコーダ12eの被検出面に対向させる。これら両センサ24a、24bの検出信号の位相差から、上記外輪3と上記ハブ4との間のアキシアル方向の変位又は荷重を求める。又、上記両センサ24a、24bの検出信号の振幅から、上記外輪3と上記ハブ4との間のラジアル方向の変位又は荷重を求める。
(もっと読む)
荷重感知機能を備えたホイールエンド
本発明のホイールエンド(A)は、ハウジング(2、70、80、90)と、ハウジングに突き出るスピンドル(32)を備えるハブ(4)であって、ハウジングとハブスピンドルとの間に位置する転がり軸受(6)上で、ハウジングと対応して回転するハブと、を備える。ハウジングは管状の芯(12、72、82、92)を備えており、芯は、軸受と、当該芯から外向きに離隔されたリングマウント(14、74、84、94)と、当該リングマウントを芯へと接続するウェブ(16、76、86、96)と、を取り囲んでいる。自動車用ホイール(B)は、ハブに取り付けられ、ハウジングと対応してハブとともに回転する。ハウジングは、そのリングマウントにて、サスペンション垂直材(C)に固定される。芯は、サスペンション垂直材からホイールへ、又はホイールからサスペンション垂直材へと、軸受を介して力及びモーメントを伝達することにより、リングマウントと対応して屈曲し、当該力及びモーメントの大きさは、ハウジングのウェブに取り付けられた歪みセンサモジュール(SM)から発せられる信号に反映される。  (もっと読む)
(もっと読む)
荷重測定装置
【課題】 制動に伴って加わる荷重分を、外輪1とハブ2との間に作用する荷重に対し加減(補償)する事で、本来求めたい荷重である、車輪の外周面と路面との間に作用する荷重を求められる構造を実現する。
【解決手段】 1対のホールIC11a、11bの出力信号の位相差に基づいて、上記外輪1と上記ハブ2との間に加わるアキシアル荷重である元測定荷重値を求める。又、ディスクブレーキのシリンダ室内に導入する油圧に基づいて、上記外輪1と上記ハブ2との間に作用する荷重である制動誤差成分を求める。そして、制動誤差成分を上記元測定荷重値に対し加減する事により、上記本来求めたい荷重を高精度で求める。
(もっと読む)
荷重測定装置付転がり軸受ユニット
【課題】 個々の転がり軸受ユニット毎に転動体3、3に付与されている予圧が異なったり、或いは、長期間に亙る使用に伴って、この予圧が変化した場合でも、この予圧の値を把握可能にする。そして、上記転がり軸受ユニットに加わる荷重を正確に求められる構造を実現する。
【解決手段】 外輪1とハブ2との相対変位に基づいて、これら外輪1とハブ2との間に加わる荷重を求める。この荷重を求める為の演算器は、上記相対変位及びこの荷重を求める機能の他、上記各転動体3、3に付与された予圧を求める機能と、この機能により求めた予圧に基づいて、上記変位から荷重を求める際に使用する、これら変位と荷重との関係に関する零点及びゲイン特性を補正する機能とを有する。
(もっと読む)
センサ付き転がり軸受装置
【課題】 複数箇所にセンサを配置することなく、転がり軸受に作用する荷重の検出が可能なセンサ付き転がり軸受装置を提供する。
【解決手段】 センサ装置2は、固定側軌道部材3と回転側軌道部材4とをハブユニット1外部において接続する外部導通手段9と、外部導通手段9途中に設けられかつ外部導通手段9、固定側軌道部材3、玉5および回転側軌道部材4からなる閉回路の抵抗値を求める計測手段10と、計測手段10の出力から転がり軸受としてのハブユニット1に作用する横Gを求める処理手段とを備えている。センサ装置2では、ハブユニット1に作用する横Gの変化に伴って転動体接触面積が変化して閉回路の抵抗値が変化することを利用して、ハブユニット1に作用する横Gが求められている。
(もっと読む)
センサ付き転がり軸受装置
【課題】 タイヤに作用する左右荷重に伴うモーメント荷重を正確に求めることが可能なセンサ付き転がり軸受装置を提供する。
【解決手段】 センサ装置2は、転がり軸受装置としてのハブユニット1の頂部に配置されてフランジ16頂部の軸方向変位量を検出する頂部変位センサ7と、ハブユニット1の底部に配置されてフランジ16底部の軸方向変位量を検出する底部変位センサ8と、各センサ7,8の出力およびフランジ16の傾きとモーメント荷重との関係からモーメント荷重を求める処理手段とを備えている。
(もっと読む)
センサ付き転がり軸受装置
【課題】 少ない部品点数にて互いに直交する3軸方向の各荷重を精度よく検知することができ、これにより構造及びセンサの組込作業を簡略化することができるセンサ付き転がり軸受装置を提供する。
【解決手段】 被検出部材14を内軸部材(回転軌道輪)と一体回転可能に設けるとともに、その被検出部材14の被検出面14aとの間の距離を検出可能なセンサを外輪(固定軌道輪)側に設置し、さらにそのセンサの出力信号が入力される制御装置(取得手段)を設ける。また、上記被検出面14aには、センサの検出面との間の距離が互いに異なる非開口部(第1の被検出部分)14b及び開口部(第2の被検出部分)14cを設け、かつ、非開口部14bの周方向の寸法を均一に構成するとともに、開口部14cの周方向の寸法を不均一に構成する。そして、制御装置が非開口部14b及び開口部14cに対向しているときのセンサの出力信号の大きさとその継続時間とに基づいて、互いに直交する3軸方向の各荷重を取得する。
(もっと読む)
センサ付車輪用軸受
【課題】 車両にコンパクトに荷重センサを設置できて、車輪にかかる荷重を安定して検出できる車輪用軸受を提供する。
【解決手段】 複列の転走面4が内周に形成された外方部材1と、この外方部材1の転走面4と対向する転走面5が形成された内方部材2と、両転走面4,5間に介在した複列の転動体3とを備える。内方部材2の外周には磁歪材で形成されたリング部材21固定し、このリング部材に対向して外方部材1または外方部材1に固定する部材24に磁歪センサ23および変位センサ22を設ける。磁歪センサ23は、前記リング部材21の磁歪変化を測定するものであり、前記変位センサ22はリング部材21と変位センサ22間の距離を測定するものである。
(もっと読む)
転がり軸受ユニットの変位測定装置及び荷重測定装置
【課題】カウンタタイマを有するCPUを使用せずに静止側軌道輪と回転側軌道輪との間の相対変位量を求められる構造を実現して、コスト低減を図る。
【解決手段】演算器は、上記相対変位量に応じて変化する、1対のセンサの出力信号同士の間の位相差に応じてデューティ比を変化させる合成信号α1 、α2 、或いは、1個のセンサの出力信号のデューティ比に基づいて、上記相対変位量を算出する。特に、上記演算器は、上記合成信号或いは出力信号のデューティ比に対応して変化する、当該信号の実効値β1 、β2 に基づいて、上記相対変位量を算出する。
(もっと読む)
81 - 100 / 133
[ Back to top ]