
Fターム[3J552VB05]の内容
伝動装置(歯車、巻掛け、摩擦)の制御 (81,513) | 車両からの情報 (3,501) | 加,減速度 (484) | 横方向(G) (36)
Fターム[3J552VB05]に分類される特許
1 - 20 / 36
車両の運動制御装置
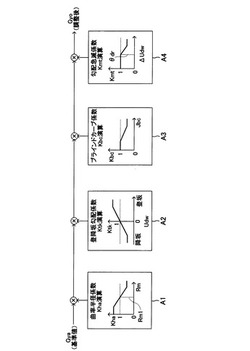
【課題】車両がカーブに進入する際において運転者が受ける安心感が考慮されて減速制御が実行される車両の運動制御装置を提供すること。
【解決手段】この装置では、運転者の安心感に影響を与える、カーブの曲率半径、登降坂勾配(上り・下り勾配)、ブラインドカーブ、及び勾配急減部分の4つの観点が考慮されて許容横加速度基準値Gyaが補正されて許容横加速度Gyoが演算・調整される。この調整された許容横加速度とカーブの曲率半径とに基づいてカーブを通過する際における適正車速が決定される。そして、所定の減速制御開始条件が成立すると、運転者の加減速操作の有無にかかわらず、減速制御が開始・実行されて、車速が上記適正車速まで減速される。このように、運転者の安心感が考慮されて許容横加速度(従って、適正車速)が決定されるから、運転者に違和感を与えることなく、減速制御が実行され得る。
(もっと読む)
車両の制御装置および制御方法

【課題】車両の走行環境や運転指向をより的確に反映した挙動特性とすることによりドライバビリティを向上させる。
【解決手段】駆動力源とその駆動力源の出力側に連結された変速機とを搭載した車両における前記駆動力源の回転数もしくは前記変速機の変速比を制御する車両の制御装置において、前記車両の走行状態に基づく指標を求めるとともに、その指標に基づいて前記駆動力源の要求回転数もしくは前記変速機に対する要求変速比を制御するように構成されている。
(もっと読む)
無段変速機
【課題】ドライバからの変速操作により適切な変速比を選択可能な無段変速機を提供する。
【解決手段】無段変速機構40,50,60と、第1の変速操作が入力される第1の変速操作部112と、第2の変速操作が入力される第2の変速操作部113と、第1及び第2の変速操作部から入力される変速操作に応じて無段変速機構の変速比を変化させる変速制御部100とを備える無段変速機1を、変速制御部は複数段の変速比が予め設定されるとともに、第1の変速操作に応じて次段の変速比への変速を行わせ、第2の変速操作に応じて次段の変速比と次々段の変速比との中間に設定される中間変速比への変速を行わせる構成とする。
(もっと読む)
車両用自動変速機の制御装置
【課題】旋回中の変速動作を適切に設定できる車両用自動変速機の制御装置を提供すること。
【解決手段】車両は、車両の前後方向の加速度を検出する前後加速度検出手段と、車両の幅方向の加速度を検出する横加速度検出手段とを具えている。自動変速機の制御装置は、ハンドル操舵角と車速から推定横加速度を算出する推定横加速度算出手段と、推定横加速度の値と横加速度の値との差である横加速度偏差を算出する横加速度偏差算出手段を具えている。ある前後加速度の値と横加速度の値とからなる加速度状態が、変速禁止を行う状態か否かを判定する判定値を横加速度偏差に応じて補正する変速禁止領域補正手段を具えている。これにより、アップシフトが禁止される領域を補正し、補正された変速禁止領域を用いて自動変速機を制御する。
(もっと読む)
変速比制御装置
【課題】旋回時に過度のシフトダウンで車両が不安定になる場合があった。
【解決手段】走行状態検出手段1からの情報と旋回状態検出状態2の情報に基づき旋回時の目標変速比を設定する旋回時目標変速比設定手段3と、車両挙動不安定の場合における目標変速比を設定する車両不安定時目標変速比設定手段5とを有し、車輪の挙動が安定か不安定を判定する車両挙動判定手段4が安定と判定した場合は、旋回時目標変速比設定手段3からの目標変速比で、車両挙動判定手段4が不安定と判定した場合は、車両不安定時目標変速比設定手段5からの目標変速比で変速機20を制御することにより、車両が不安定になることを防止する。
(もっと読む)
車両の変速制御装置
【課題】 ダウンシフト直前の車速にかかわらず適度な減速感を得ることができ、ドライバに与える違和感を軽減できる車両の変速制御装置を提供する。
【解決手段】 車両前方の減速対象を検出するナビゲーションシステム13と、エンジン1と左右前輪5a,5bとの間に介装したCVT2と、検出された減速対象に応じた目標減速度Gtを算出し、自車と減速対象との距離Lnが距離閾値Lt以下となったとき、目標減速度Gtに応じてCVT2の変速比をダウンシフト側へ変更するCVTコントローラ6と、を備え、CVTコントローラ6は、目標減速度がGt高いほど距離閾値Ltを増加させる。
(もっと読む)
車両の変速制御装置
【課題】 複数のコーナーが連続する複合コーナーにおいて、ドライバの意図しない減速度変化を抑制できる車両の変速制御装置を提供する。
【解決手段】 コントローラ5は、車両前方に連続する複数のコーナーが検出された場合、複数のコーナーのうち最も曲率半径の小さなコーナーを減速対象として選択し、当該コーナーの曲率半径に応じて自動変速機2の変速比をダウンシフト側へ変更する。
(もっと読む)
自動変速機の変速制御装置
【課題】ドライバの操作にばらつきがある場合であっても適切なダウンシフトを行う自動変速機の変速制御装置を提供する。
【解決手段】自動変速機20の変速制御を行う変速制御装置30を、車両の加速度を演算する加速度演算手段33,34と、加速度演算手段によって演算された加速度に基づいて変速判定値を演算する変速判定値演算手段36と、変速判定値演算手段によって演算された変速判定値を微分する変速判定値微分手段37と、変速判定値の微分値が閾値を超えた場合に自動変速機のダウンシフトを許可するとともに、変速判定値の微分値が閾値未満である場合にダウンシフトを禁止する変速制御手段39とを備える構成とする。
(もっと読む)
自動変速機の制御装置
【課題】自動変速機の制御装置において、適正なキックダウン制御を可能としてドライバビリティの向上を図ると共に燃費の向上を図る。
【解決手段】ドライバによるキックダウン操作を検出したとき、アクセル開度と車速に基づいてキックダウン操作から予め設定された所定時間経過後の目標変速段を設定し、目標変速段が現在の変速段より低速側であるときには、スロットル開度と車速に基づいてシフトダウンを実行する一方、目標変速段が現在の変速段と同じかまたは高速側であるときにはシフトダウンを禁止する。
(もっと読む)
無段変速機の変速制御装置
【課題】車両が低μ路を走行中、無段変速機のダウンシフトを実行するときに、駆動輪がスリップすることを事前に回避する無段変速機の変速制御装置を提供する。
【解決手段】本発明は、点Aから第2速(2nd)へのダウンシフトが実行されると判定されるとき、駆動輪のスリップが発生するかどうかを推定し、スリップが発生すると推定されるときは、当該ダウンシフトの進行をダウンシフト規制回転数線Npri_Dlim上の点Bまでに規制したのち、第2速(2nd)への変速制御を実行する。
(もっと読む)
自動車の横加速度を評定するための装置および対応する方法
自動車の横加速度を評定するための装置は、車両の2つの車輪の回転速度を測定する手段(6、7)と、これらの速度から車両の横加速度を推定するモジュール(D3)とを備える。装置はさらに、車両の作動パラメータ、特に前記車輪の回転速度および関連する変速比に応じて、モジュールによって推定された横加速度が湾曲の検知に関連する場合は負であり、その逆が真である場合は正であるブール値設定変数を計算することができる検証モジュール(2)を備える。  (もっと読む)
(もっと読む)
車両の車速制限装置
【課題】車速制限動作を解除した際に運転者の意図に沿った加速を実現することができる車両の車速制限装置を提供する。
【解決手段】車速制限動作が解除された際のギヤ段への変速応答性を、車速制限動作が解除される直前のアクセル開度の変化割合dpapbfが第2の所定の変化割合X2よりも小さいとき(dpapbf<X2)に最も遅い第1の変速特性sftchar1に、車速制限動作が解除される直前のアクセル開度の変化割合dpapbfが第2の所定の変化割合X2よりも大きくかつ第3の所定の変化割合X3よりも小さいとき(X2≦dpapbf<X3)に第1の変速特性sftchar1よりも若干早い第2の変速特性sftchar2に、更に、車速制限動作が解除される直前のアクセル開度の変化割合dpapbfが第3の所定の変化割合X3よりも大きいとき(dpapbf≧X3)に最も早い第3の変速特性sftchar3にそれぞれ変更している。
(もっと読む)
車両用制御装置
【課題】車両の走行に必要な駆動力を確保する車両用制御装置(6,7,8)において、コーナリング中に横方向加速度を受けることをあまり好まない安定嗜好の運転者に対して不安・不快意識を抱かせないようなコーナリングを可能とする。
【解決手段】走行路のコーナの手前位置で、少なくとも車両重量、現在車速、前記コーナの曲率および路面勾配等の情報を収集して、前記コーナを現在車速で走行する際に車両に発生する横方向加速度を推定する推定手段(ステップS1,S2)と、この推定手段の推定結果が予め規定される閾値以上の場合に、安定嗜好の運転者が不安・不快意識を持つ条件が成立したと認識して、駆動力を小側に制御する対処手段(ステップS3〜S6)とを含む。
(もっと読む)
車両用駆動力制御装置
【課題】コーナーを走行する際にコーナーの情報に基づいて変速比を制御する車両用駆動力制御装置において、運転者の感覚に合うタイミングでコーナーの情報に基づく変速比の制御から復帰することが可能な車両用駆動力制御装置を提供する。
【解決手段】コーナーを走行する際に前記コーナーの情報に基づいて変速比を制御する車両用駆動力制御装置であって、前記車両に働く横加速度を検出する手段(S002)と、アクセル開度を検出する手段(S002)とを備え、前記横加速度の変化量と前記アクセル開度の変化量とに基づいて前記変速比の制御から復帰するタイミングが変更される(S004)。
(もっと読む)
車両用駆動力制御装置
【課題】車両の駆動力を制御する車両用駆動力制御装置において、車両の駆動力を制御した後の車両が安定的な状態となるように制御することが可能な車両用駆動力制御装置を提供する。
【解決手段】タイヤのグリップ限界に基づいて前記タイヤにかかる出力トルクを制御する車両用駆動力制御装置であって、各輪の前記タイヤの駆動力の変化量と横力の合成力(FLn)と各輪の前記タイヤのグリップ限界(FTn)の比較結果に基づいて、前記タイヤにかかる出力トルクを制御する。前記各輪のタイヤのグリップ限界は、路面摩擦係数、前記各輪にかかる重量、及び重力加速度に基づいて設定される。
(もっと読む)
車両の制御装置
【課題】旋回時に変速機の変速を制限する制御を行う車両において、直進走行状態のときに変速が制限されることを回避する。
【解決手段】車輪速度データに基づいて算出した左右輪の車輪速度差で走行した距離の頻度を、車輪速度データを採取するごとに算出・累積し、その距離頻度の頻度分布の最高頻度を直進と判定する。このように実際に走行した車両の走行履歴に基づいて直進を判定することにより判定精度を高めることができる。例えば左右輪のタイヤ径に径差があり、直進走行での左右輪の車輪速度差がΔVaである場合、その車輪速度差ΔVaでの走行頻度が最も多くなるので、車輪速度差ΔVaを直進と判定することにより、直進の判定精度を高めることができる。そして、このようにして直進と判定した車輪速度差ΔVaを基準として、変速制限を掛けない領域Faを設定することにより、直進状態のときに変速が制限されるという不具合を回避できる。
(もっと読む)
自動変速機の制御装置
【課題】運転者の意図しない不要な変速段のシフトを防止し、ドライバビリティを向上した自動変速機の制御装置を提供する。
【解決手段】車両1に搭載された自動変速機5の変速を制御するT−ECU12は、自動変速モードおよび手動変速モードのいずれかで自動変速機の変速を制御する変速制御手段と、手動により操作された自動変速機5のアップシフトおよびダウンシフトのシフト指示を検出するシフト検出手段と、シフト検出手段によりシフト指示が検出されているシフト指示時間を測定する指示時間測定手段と備え、変速制御手段が、自動変速モードで自動変速機の変速を制御している場合、指示時間測定手段により測定されたシフト指示時間に基づいて、手動変速モードに移行せず、自動変速機の変速を禁止する変速禁止モードに移行するよう構成する。
(もっと読む)
変速機の油面調整装置
【課題】車両の走行状態に起因する油面の変化の度合を抑制する。
【解決手段】ECUは、貯留部内の作動油に作用する加速度Gの絶対値が予め定められた値αよりも大きいと、供給方向を判定するステップ(S102)と、ポンプモータの制御を実施するステップ(S104)とを含む、プログラムを実行する。
(もっと読む)
車両の変速制御装置
【課題】ドライバーの意思を十分に反映させて自動変速モードに復帰すること。
【解決手段】手動変速モードと自動変速モードとを切り替え可能な自動変速機32と、車両に搭載され走行路が直線路または曲線路かを判別する横Gセンサ20と、横Gセンサ20の検出結果に基づいて手動変速モードから自動変速モードに切り替えるECU30とを備え、更に視線認識装置26によってドライバーの視線情報を検出し、進行先の曲線路情報を加味することで自動変速モードに復帰するタイミングを制御するようにした。
(もっと読む)
車両用駆動力制御装置
【課題】実際の自車速と運転者の意思に基づいて設定される目標車速に基づいて自車速を制御する場合に、走行環境や運転者の意思による車両の操作量が様々な状況である場合においても、運転者の意思に合う制御が行われることが可能な車両用駆動力制御装置を提供する。
【解決手段】実際の自車速と、運転者の意思に基づいて設定される目標車速とに基づいて、自車速を制御する車両用駆動力制御装置であって、横加速度に応じて車速制御態様を変更する手段508と、実際の自車速と前記目標車速との相対車速に基づいて、前記横加速度に応じた車速制御態様の変更度合いを変更する手段とを備えている。
(もっと読む)
1 - 20 / 36
[ Back to top ]