
Fターム[5B057CD17]の内容
Fターム[5B057CD17]に分類される特許
1 - 20 / 27
画像処理装置および方法、並びにプログラム
【課題】より簡単かつ迅速にパノラマ画像の所望の方向の領域を切り出すことができるようにする。
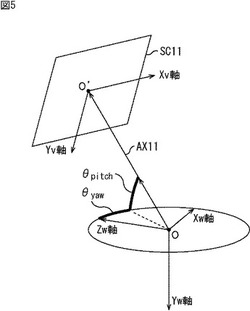
【解決手段】画像処理装置は、球面に投影されたパノラマ画像の所定の視線方向の領域を切り出して表示させる場合、指定された視線方向により定まる仮想的なスクリーンに投影されるパノラマ画像の領域を出力画像として表示させる。すなわち、画像処理装置は、スクリーン上の位置に投影されるパノラマ画像の画素位置を近似関数により算出し、出力画像を生成する。このとき、画像処理装置は、近似関数による近似誤差の評価を行なう。具体的には画像処理装置は、スクリーン上の書き込み領域内の各位置に対応するパノラマ画像の画素位置を1つの近似関数を用いて求めるときに、近似誤差が許容量以下となるように書き込み領域の範囲を定める。本技術は、画像処理装置に適用することができる。
(もっと読む)
色域外郭情報生成装置、及びプログラム

【課題】出力装置に依存しない色空間上にランダムに分布する、色域外郭上にある複数の点から、色域外郭を特定する情報を生成すること。
【解決手段】出力装置に依存しない色空間内の複数の座標のそれぞれにある外郭点を、それぞれ位相を保存しつつ二次元内の対応する点に写像し、当該写像により得られた二次元内の複数の点の凸包内部を三角形分割してその結果を分割情報として生成し、当該分割情報に基づいて外郭点をその境界に含む色空間内の立体形状を特定する情報を、色域外郭情報として生成する。
(もっと読む)
カメラ、画像変換装置、及び画像変換方法
【課題】広角レンズを用いて撮像された歪曲画像から、従来に比してより自然でより見易い表示画像を得ること。
【解決手段】撮像部101は、広角レンズ102を用いて撮像画像を得る。空間モデル格納部111には、撮像空間に存在する、床、天井、壁、テーブル等がモデル(テンプレート)化された空間モデルが格納されている。投影変換部109は、撮像画像を空間モデルに投影するようにマッピングする。平面変換部112は、空間モデルにマッピングされた画像を用いて、ディスプレイ画像を得る。
(もっと読む)
画像変換装置、画像生成システム、画像変換方法及び画像生成方法
【課題】 球面画像を保存しやすい画像に変換可能な画像変換装置、画像生成システム、画像変換方法及び画像生成方法を提供する。
【解決手段】 画像変換装置30は、離散球面に撮影画像が投影された球面画像40を生成する球面画像生成部32と球面画像を長方形画像70に変換する画像変換部33とを備える。離散球面が有する画素は測地ドーム50の頂点51に対応する。長方形画像が有する各四角形画素の画素値は、測地ドームの一経線上の各頂点を基点とし、複数の基点が第1の方向に並べられ各基点と同一緯度の頂点が各基点に対して第1の方向に直交する第2の方向に並べられた中間配列構造60から、測地ドームの第1及び第2の極に対応する頂点を削除して中間配列構造の所定の頂点を移動させることで中間配列構造の複数の頂点が四角形状に並べられた2次元配列構造において、各四角形画素の位置の頂点に対応する球面画像の画素の画素値である。
(もっと読む)
設備識別プログラム、方法及び装置
【課題】撮影された電柱や鉄塔などの設備を識別する。
【解決手段】本方法は、上辺又は底辺に垂直な基準線等が特定されており且つ上辺又は底辺上の距離が撮影点から見込む角度に比例するように撮影された画像と当該撮影点の撮影位置データと基準線等の方位角とを格納する画像データ格納部に格納されている第1画像に対して、画像認識処理を実施し、電柱及び鉄塔を含む識別対象設備の画像部分を抽出し、抽出された画像部分を通る直線と基準線等との関係から画像部分の変位角を算出すると共に、当該変位角と基準線等の方位角とにより、画像部分の方位角を算出し、撮影点の撮影位置データと算出された画像部分の方位角とから特定される範囲に含まれる識別対象設備のうち最も撮影点に近い識別対象設備の識別子を、識別対象設備の識別子と位置データとが登録されている設備データ格納部から抽出する。
(もっと読む)
ディスプレイ装置
【課題】汎用のプロジェクタを利用でき、構造が簡素で、低コストで製造し得るディスプレイ装置を提供する。
【解決手段】本発明は、半球状の透過スクリーン1と、該透過スクリーン1に表示される画像を投射するプロジェクタ2と、該プロジェクタ2から投射される画像を生成するコンピュータシステム3とを備えるディスプレイ装置であって、前記コンピュータシステム3が、平面像の画像データを記憶する記録媒体と、該記録媒体に記憶された画像データを補正し、曲面像の画像データを生成する生成手段と、該生成手段によって生成された曲面像の画像データを前記プロジェクタ2に送信する送信手段とを備えることを特徴とする。
(もっと読む)
映像合成方法、映像合成システム
【課題】合成に用いる合成用映像を生成する際において、任意の背景で撮影された映像から合成用素材のみが抽出された合成用映像を得ることが可能な映像合成方法および映像合成システムを提供する。
【解決手段】本実施形態に係る映像合成方法および映像合成システムは、背景側映像10の複数のフレームにおいて同一の背景位置を示す指標点の位置を比較することにより、背景側映像10の各フレームの撮影時のパン角度およびチルト角度を算出する角度算出処理と、素材側映像12の各フレームの撮影時のパン角度およびチルト角度に基づいて、素材側映像12のフレームごとに背景側映像10のフレーム群から比較用フレーム10aを選択する背景選択処理と、選択した比較用フレーム10aと素材側映像12の各フレームを比較することにより、合成用素材20が抽出された合成用映像14を生成する背景比較処理と、を行う。
(もっと読む)
任意視点画像生成装置及び任意視点画像生成方法
【課題】 任意視点画像を生成するための画像を撮影するためのカメラ等の撮影手段の位置や撮影方向、また撮影手段間の光学系が不統一な場合であっても任意視点画像を生成する。
【解決手段】 任意視点画像生成サーバ10は、画像及びカメラパラメータを入力する画像入力部11と、入力された画像及びカメラパラメータから、画像が撮影された位置に入射する光線を算出する光線算出部12と、生成する任意視点画像に係る仮想的な撮影方向及び撮影位置を示す情報を入力する視点情報入力部13と、仮想的な撮影方向及び撮影位置を示す情報に基づいて、上記の光線の方向から、当該仮想的な撮影位置に入射する光線を算出する光線マッピング部14と、上記算出された光線の輝度値から任意視点画像を生成する画像生成部15と、任意視点画像を出力する画像出力部16とを備える。
(もっと読む)
画像処理装置
【課題】カメラ画像等の2次元画像から遠近感や立体感を強調や抑制した画像を簡易に合成したり、3次元立体視用の画像に簡単に変換したりすることができるようにする。
【解決手段】2次元画像における輪郭エッジを抽出し、抽出された輪郭境界内の被写体別に画像領域を分割し、分割された被写体毎に距離情報を付加し、遠近感を強調する補正変換処理を行なう手段1と、補正した被写体の距離情報に応じて補間計算するとともに、距離に応じた大きさで乱数加算する手段3を備える。
(もっと読む)
画像処理装置及び画像処理方法
【課題】全方位アタッチメントを用いた内視鏡で撮像された画像から、死角のない直感的に理解し易い画像を生成することができる画像処理装置を提供する。
【解決手段】画像入力部221により入力された時系列の画像の各々を、球面座標系に配置した画像である変換後画像に変換する画像変換部222と、時系列の変換後画像を用いて、各変換後画像の各画素における動きベクトルを算出する動きベクトル算出部(時空間画像作成部223〜動きベクトル抽出部226)と、時系列の変換後画像の各々について、当該変換後画像に含まれるカメラの死角部分の画素の画素値を、当該画素における動きベクトルにより特定される他の変換後画像の死角部分以外の対応点の画素値を用いて補間する画素値補間部227とを備える。
(もっと読む)
干渉合成開口レーダシステム、処理方法、飛行体制御装置、飛行体制御方法及びプログラム
【課題】高度が異なる複数の合成開口レーダ間で観測対象物を一致させ、2つの衛星の観測データ間の相関を適切に保つ。
【解決手段】合成開口レーダ衛星200の軌道と合成開口レーダ衛星100が観測した観測対象物の位置とに基づいて合成開口レーダ衛星200のオフナディア角θ2を算出し、合成開口レーダ衛星200のオフナディア角が算出したオフナディア角θ2になるように合成開口レーダ衛星200のアンテナの指向性を設定する。次に、合成開口レーダ衛星100のオフナディア角θ1と合成開口レーダ衛星100が放射する電波の周波数帯域f1±B1/2と算出した合成開口レーダ衛星200のオフナディア角θ2とに基づいて合成開口レーダ衛星200が放射する電波の周波数帯域f2±B2/2を算出し、合成開口レーダ衛星200が放射する電波の周波数帯域を算出した周波数帯域f2±B2/2に設定する。
(もっと読む)
映像表示システム及び該システムのパラメータ生成方法
【課題】映像品質の劣化を抑えながらも、より低いコストで、魚眼レンズ等を用いて撮影した映像を表示することのできる映像表示システムを得る。
【解決手段】画像供給部101からの高解像度な入力画像に対して、切り出し部112、122が、補正部113、123の処理に必要となる最小限の矩形領域を抽出し、補正部113、123で処理が可能な解像度に変換して出力するようにし、補正部113、123が、従来の幾何補正パラメータと、切り出し部で切り出された入力画像を設計値に合わせるための幾何補正パラメータとを合成した、第2の幾何補正パラメータを用いて幾何補正を実施するようにする。補正部113、123からの出力画像は、投映部114、124を介してスクリーンに投映される。
(もっと読む)
カメラ装置
【課題】旋回型のカメラ装置であって、背景差分処理によって撮影画像の変化を検出するように構成され、メモリ容量を低減でき、静止物体も検出できるカメラ装置を提供する。
【解決手段】カメラ21は旋回可能である。画像変換部31は、カメラ21の撮影画像を球面に投影して球面画像に変換する。球面背景合成部35は、複数の撮影方向で撮影された複数の撮影画像から変換された複数の球面画像を合成して球面背景画像を生成する。異常発生領域検出部39は前景部分検出部であり、判定対象の撮影画像から変換された球面画像を球面背景画像と比較することによって球面背景画像と異なる前景部分を検出する。
(もっと読む)
画像表示装置及びその制御方法、プログラム、記憶媒体
【課題】 多数の画像を表示して一覧性を高めると同時に、各画像の特徴的な部分を見えやすく表示することで視認性も高めることが可能な、複数の画像を表示する技術を提供する。
【解決手段】 複数の画像を表示する画像表示装置は、画像データを記憶手段から読み出す読出手段と、前記画像データにより示される元画像から特徴部分を抽出する抽出手段と、抽出された前記特徴部分に基づいて前記元画像を変形し、表示画像を生成する生成手段と、前記表示画像を表示手段に表示制御する表示制御手段と、を備え、前記生成手段は、前記元画像を、その全体において前記特徴部分の占める割合が相対的に大きくなるように変形して、前記表示画像を生成する。
(もっと読む)
三次元環境情報取得装置,三次元環境情報取得方法及びその方法を実現したプログラムを格納した記録媒体
【課題】複数の撮像装置から取得した情報から三次元環境情報を容易に取得し、極めて簡単な操作のみで全ての撮像装置情報を一つの世界座標系に統合する三次元環境情報取得装置,三次元環境情報取得方法及びその方法を実現したプログラムを格納した記録媒体を提供する。
【解決手段】複数の撮像装置を移動させながら観測した画像列を取得する手段11,前記の取得した移動観測画像列の各フレームを撮影したときの撮像装置運動を推定する手段12,その取得した撮像装置運動を用いて被写体の三次元点群を取得する手段13,前記の移動観測画像列を用いて取得された三次元点群を統一された世界座標系に統合する手段14,その統合された三次元点群から基準面領域を検出する手段15,その検出された基準面領域の情報に基づいて、その統合された三次元点群からエラー点を除去する手段16を有するものである。
(もっと読む)
パノラマ画像作成方法
【課題】カメラのレンズの主点が一致しない条件で撮られた画像からでも、物体の画像がぶれない状態でパノラマ画像を作成する。
【解決手段】パノラマ画像の視点を中心とした複数の仮想的な同心球を用意し、同心球面上の任意の点に対応する各画像上の点もしくは点の近傍の画素値同士から計算される類似度を、同心球面上にマッピングし、同心球面上の任意の点に対して、同心球面上の任意の点と画像を撮影したカメラの光学系の物体側主点とを結ぶ線と、同心球面上の任意の点と同心球の中心点を結ぶ線との角度と、対応する画像上の点の画素値から計算されるテクスチャ値を同心球面上にマッピングし、同心球と中心点を同じくする単位球を用意し、同心球の中心を起点として単位球面上の各点へ延ばした線が各同心球面と交わる点にマッピングされている類似度と、テクスチャ値より求められる値を単位球面上の各点のテクスチャ値としてマッピングし、単位球面にマッピングされたテクスチャ値をパノラマ画像として出力する。
(もっと読む)
画像合成装置、画像合成方法、画像合成プログラム及び記録媒体
【課題】 傾きのある画像同士を精度良く貼合わすことができ、簡便に画像を合成することのできる画像合成技術を提供する。
【解決手段】 画像を表示することが可能なディスプレーに擬似的な三次元空間を生成し、その擬似的な三次元空間に球面又は球面を表すフレームを表示するフレーム表示ステップと、画像を選択する画像選択ステップと、球面又は球面を表すフレームを観察する視点を移動する視点移動ステップと、画像選択ステップで選択された画像を球面又は球面を表すフレーム上に配置する画像配置ステップと、操作指示に応じて、画像配置ステップで球面又は球面を表すフレーム上に配置された画像を回転操作又は平行移動操作又はズーム操作する操作ステップと、操作ステップで操作された複数の画像を1つの画像に合成する合成ステップとを有する画像合成方法である。
(もっと読む)
画像表示方法及び装置
【課題】魚眼レンズ等の広角レンズを用いインターレス方式で撮影したカメラ画像を、歪みを補正してインターレス方式で表示する際に、特に画面内の固定画像とそれに隣接する移動画像との境界部分に干渉縞が発生することを防止可能な画像表示装置とする。
【解決手段】インターレス画像処理部1では、魚眼レンズ等の広角レンズを用いたカメラ9によりインターレス方式で撮影した画像を取り込み、撮影画像から固定画像を自車両画像認識部3で認識し、認識した固定画像の輪郭における最下部を自車両輪郭最下部検出部4で検出する。自車両輪郭最下部フィールド検出部5では、自車両輪郭の最下部が存在するフィールドを検出する。偶数・奇数フィールド選択部では、自車両輪郭最下部フィールドが奇数行のとき偶数行を、また偶数行のとき奇数行を選択し、選択した行のみの画像を魚眼画像補正部7で魚眼補正して出力表示する。
(もっと読む)
色再現域マッピング装置及びこれを用いた色再現域境界設定方法
【課題】 本発明は、色再現域マッピング装置及びこれを用いた色再現域境界設定方法を提供する。
【解決手段】 入力される色サンプルの色座標値を球座標系の値に変換し、前記球座標系を所定個数に分割する色座標変換モジュールと、前記分割されたそれぞれのセグメントについてセグメントに属する色座標値のうち半径が一番大きい色座標値を検出する判断部、及び前記検出された半径が一番大きい色座標値に基づいて前記分割されたそれぞれのセグメント別に各セグメントの中心に最も隣接した前記半径が一番大きい色座標値を検出して色再現域境界を設定する色再現域境界設定モジュールを含むが、前記球座標系は色相値及びそれぞれの色相について一番大きい彩度値に基づいて分割される。これにより、相異なるカラー入出力装置間の色再現性能を向上させることができる。
(もっと読む)
魚眼カメラの校正方法。
【課題】一対の球面画像を利用して被写体までの距離を容易に算出することができる距離算出装置、距離算出方法、構造解析装置、及び構造解析方法に対して好適に適用できる魚眼カメラの校正方法を提供する。
【解決手段】 魚眼レンズ特性を有する魚眼カメラ12rの校正方法では、校正部材を被写体として撮像し、校正部材の被写体像を基に内部パラメータの初期値を算出し、その初期値を基に被写体像の球面画像を形成し、世界座標系での校正部材上の物点と球面画像上の像点との間に成立する変換式群を元に外部パラメータの初期値を算出し、変換式群に基づいた第1の目的関数を元に内部及び外部パラメータの第1推定値を算出し、被写体像の像点と、内部及び外部パラメータの第1推定値を基に算出される上記物点の画像平面への投影点との間の二乗距離の合計を示す第2の目的関数を最小化することによって、内部及び外部パラメータの校正用の値を算出する。
(もっと読む)
1 - 20 / 27
[ Back to top ]