
Fターム[5B057DC07]の内容
画像処理 (340,757) | 分析部、分析手段 (35,413) | 特徴の抽出 (25,407) | 幾何学量の算出 (10,741) | 特徴点 (2,407) | 始点、終点、屈曲点、分岐点 (396)
Fターム[5B057DC07]に分類される特許
381 - 396 / 396
画像処理装置及びその方法
【課題】 1つの文字に対して、従来より多くの透かし情報の情報を埋め込みつつ、文字の劣化を抑えることが可能な透かし情報埋め込み及び抽出を目的とする。
【解決手段】 画像入力部101で文書画像を入力し、文書解析部102で入力した文書画像の文字の特徴点を抽出し、特徴点に電子透かしを埋め込み部106で埋め込む。ただし、特徴点とは、少なくとも、前記文字の交差点、T字点、角、端点の何れかである。
(もっと読む)
文字・図形の認識方法および検査方法

【課題】ドット文字・図形、かすれた文字・図形、分断された文字・図形を認識する。
【解決手段】ターゲットデータ抽出過程(S1)は、画像から抽出した骨格線を単純形状である近似線の集合として近似し、1単位で扱う近似線群をターゲットクラスタとする。照合度算出過程(S2)は、ドット文字・図形におけるドットの配列を表すドット文字・図形マスタとターゲットクラスタとの位置を合わせた後に、ドット文字・図形マスタの各配置点を基準とする注目領域を設定し、注目領域ごとにターゲットクラスタにおけるドットの有無の程度を数値化したドット照合度とドット文字・図形マスタに含まれるドットの配列との類似度をクラスタ照合度として求め、クラスタ照合度が閾値以上になるときにターゲットクラスタをドット文字・図形マスタが表す文字・図形と認識する。
(もっと読む)
肺結節を検出するための候補の作成方法
三次元ボリュームデータ内に候補を作成するための方法は、標識された前景ボクセル(101)を含む三次元ボリュームデータの二値ボリューム画像を形成するステップと、二値ボリュームデータ(102)の標識された前景ボクセルの複数の形状特徴を推定するステップであって、二値ボリューム画像の前景ボクセルからピークボクセルおよび高曲率ボクセルを識別し、境界および各ピークボクセルについての複数の信頼値を蓄積し、複数の信頼値から信頼ピークを検出して信頼ピークを候補点であると決定するステップと、検出された信頼ピーク(103)を前提として候補点を精緻化し精緻化された候補点を候補であると決定するステップとを含む。  (もっと読む)
(もっと読む)
物体検出装置
【課題】画像上で複数の物体が接近し又は一部重複している場合でも、各物体を個別且つ安定に識別する。
【解決手段】検出されたトラック70の空間上での位置に基づいて物体位置領域82aを算出する。前時刻に記録された物体位置領域82aに相当するテンプレート80aを呼び出す。テンプレート80aを基準画像Ib上で類似度が最大となる位置に移動させる。物体位置領域82aと移動したテンプレート80aとの重なり割合(R(t-1)∩Rt)を算出する。重なり割合を用いて、過去に検出された物体と同一か否かを判断する。
(もっと読む)
画像処理方法および画像処理装置
本発明の画像処理方法においては、基準画像と参照画像とを用いたステレオマッチングによって対象物の形状を復元するにあたり、基準画像および参照画像に対して、それぞれ所定の相関関係に基づいて対応付けされた複数のウィンドウを設定する。このうち、参照画像に形成された複数のウィンドウを伸縮させて変形させることにより、前記参照画像における隣接するウィンドウ同士間の離間又は重なり合いを解消させて、前記基準画像のウィンドウと前記参照画像のウィンドウとのステレオマッチングを行い、前記対象物の形状を復元する。このようにすることで、対象物の復元を行う際に、曲面等を滑らかに復元し、近い距離を撮影するステレオカメラに対しても用いることができ、また、演算処理量を少なくできるので処理時間も短縮することができる。  (もっと読む)
(もっと読む)
医用画像表示装置
【課題】 管腔臓器の観察対象となる領域を効率的に抽出、表示ができる。
【解決手段】 医用断層画像撮影装置により撮影された医用断層画像を表示するディスプレイ19と、該表示された医用断層画像を参照して、観察対象となる管腔臓器領域を抽出するための領域の開 始点を設定するマウス16と、を備え、CPU10は、該設定された開始点から所定の抽出アルゴリズムにより前記管腔臓器領域を抽出し、該抽出された管腔臓器領域の分岐部を検出し、該検出された分 岐部の分岐方向のうち一方向を選択し、該選択された方向の管腔臓器を前記所定の抽出アルゴリズムにより再抽出し、該再抽出された管腔臓器と前記医用断層画像を前記表示手段に表示制御する。
(もっと読む)
3次元対象物の表面構造を画像化するための装置
本発明の目的は、3次元対象物の表面構造を画像化するための装置に関する改良であって、3次元対象物の少なくとも1つの部分領域の表面を様々な位置から光学的に記録するための記録デバイスを具備しているとともに、単純な態様でもってなおかつ再現性よく対象物を画像化することができる。本発明においては、装置は、第1観測方向に起因しかつデジタル的に記録された光学的データを備えてなる第1画像部分(10)を選択するための選択回路(9)と、他の観測方向に起因しかつデジタル的に記録された光学的データを備えてなる少なくとも1つの他の画像部分(12)を決定するための画像モジュール(11)と、マッチングユニット(16)と、を具備し、マッチングユニット(16)は、第1画像部分(10)内におよび少なくとも1つの他の画像部分(12)内に含有されたデジタルパターン(13,14)を決定することができる。  (もっと読む)
(もっと読む)
カメラパラメータ算出較正装置およびカメラパラメータ算出較正プログラム
【課題】 既存のパターンや構造物のモデル上の基準点と、実写画像との対応付けを効率的に行って、カメラパラメータのキャリブレーションを実行することができるカメラパラメータ算出較正装置およびカメラパラメータ算出較正プログラムを提供する。
【解決手段】 カメラパラメータ算出較正装置1は、カメラの位置座標、撮影方向および焦点距離からなるカメラパラメータの少なくとも1つを算出し、算出した算出結果に従って前記カメラパラメータを較正するものであって、カメラパラメータ記憶手段7と、画像入力手段3と、点対応入力手段5と、画像生成手段15と、画像合成手段17と、画像表示手段19と、逆投影手段9と、点対応記憶手段11と、カメラパラメータ算出手段13と、を備えた。
(もっと読む)
画像の歪み補正方法
【課題】 画像の歪曲収差補正を簡便に高精度で行う。
【解決手段】 中央に配置される中心円と等間隔に配置される格子点とを有する歪曲補正図をカメラよって撮影してデジタルデータである実写歪曲補正画像を取得し、該画像における中心円の直径と格子点の間隔との比から理想格子点の位置を決定し、各実写格子点の位置と理想格子点の位置とに基づく補正式を求め、該補正式により歪曲収差を補正する。
(もっと読む)
識別方法、コンピュータプログラム及びコンピュータプログラム装置
CTスキャン画像中の病巣と壁との間の接合の検出方法において、内部空間(L)に対して前記壁の境界(B)を決定し、前記境界に沿った特異点(c1 ,c2 )を識別し、及び前記壁と前記病巣との間の接合点として、病巣のどちらかの側の1つの特異点を選択することを特徴とする方法が提供される。特異点は、境界の極大曲率の点及び直線と湾曲部との遷移点であってよい。特異点は、病巣の両側の第1および第2シード点(p1 ,p2 )を受付け、それらが既に境界上にあるわけではない場合にシード点を境界に対して移動し、シード点に最も近い特異点を探索することによって選択されてよい。シード点は、決定された接合点(j1 ,j2 )を隣り合うスライス画像から現在のスライス画像に移すことで決定してよい。 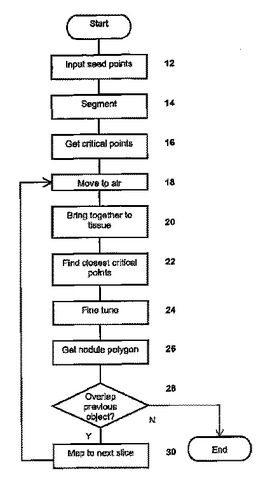 (もっと読む)
(もっと読む)
3次元測量装置及び電子的記憶媒体
[課題] 本発明は、測量装置と撮像装置とにより3次元座標データを演算するための3次元測量装置等に係わり、特に、測量装置により対応点の位置を決定し、ステレオ表示が可能な3次元測量装置を提供することを目的とする。
[解決手段] 本発明は、測量装置により計測された少なくとも3点の基準点の位置と撮像装置による画像とから、撮像装置の傾き等を算出し、測量装置により計測された視準点の位置から、撮像装置の傾き等を算出し、視準点を対応点として撮像装置の画像のマッチングを行い、測量装置が測定した視準点の位置と、マッチングを行った画像にある視準点とを関連付け、その関連付けに基づき測定対象物の3次元座標データを演算することができる。
(もっと読む)
画像内にあるオブジェクトのスケーリングを可能にするための画像処理装置、イメージングシステム、コンピュータプログラム及び方法
本発明は画像内にあるオブジェクトをスケーリングする画像処理装置に関する。前記画像処理装置は、マーカの実際の寸法と、画像内にあるこのマーカのピクセル単位での寸法との間の関係から得られる較正係数に基づいて前記オブジェクトをスケーリングするキャリブレータを有し、ここでキャリブレータはさらに、前記画像内において識別される複数の異なる配向のマーカを使用して得られる複数の較正係数を生成する。画像(I)は、解剖学的構造(2)対してこれらオブジェクトの異なる位置合わせとなる、空間において異なって配向される複数のオブジェクト(3、8、9)を有する。前記オブジェクト(3)は計測ツールにリンクされ、これは前記オブジェクト(3)のピクセル単位での長さを計測し、マーカ(A)から決められる較正係数を使用して、前記オブジェクト(3)の実際の寸法を計算する。前記マーカは空間においてオブジェクト(3)と同様に位置合わせされる。画像(I)はさらに、計測ツールにリンクされるオブジェクトを有し、これは、これらオブジェクトのピクセル単位での夫々の長さに基づいてこれらオブジェクト(8、9)の実際の長さ、及び前記マーカ(B)を使用して決められる較正係数を計算する。好ましくは、別々のマーカに対応するオブジェクトがグループ化され、較正グループを形成し、これにより、較正係数の更新が同じ較正グループ内にある全てのオブジェクトに対する実際の寸法の自動更新となる。好ましくは、各較正グループはユーザの便宜に対し別々に識別される。本発明はさらに、画像内にあるオブジェクトのスケーリングを可能にするためのイメージングシステム、コンピュータプログラム及び方法にも関する。 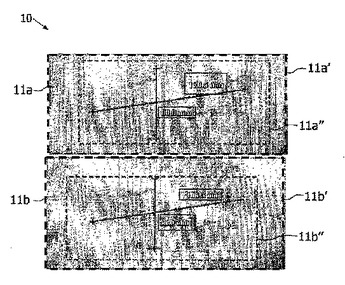 (もっと読む)
(もっと読む)
単一像から、3D物体の測定、モデリングおよびマッピングのためのシステム、コンピュータプログラムおよび方法
少なくとも1つの3次元物体の単一画像から、3次元測定情報を導出し、かつ/または3次元モデルおよびマップを作成するための方法が提供される。前記方法は以下のステップを含む。(a)物体の少なくとも1つの前記物体の2次元単一画像を取得し、該画像は画像データから構成されて画像幾何モデル(IGM)に関連付けられること、(b)IGMに基づいて、画像に関連付けられた3次元座標情報を導出し、3次元座標情報を画像データに関連付けること、(c)(i)IGMを使用して物体の投影を測定し、物体に関する高さおよび/または点間距離を含む測定データを導出し、かつ/または(ii)物体の影を測定し、物体に関する高さおよび/または点間距離を含む測定データを導出するように画像データを分析すること、および(d)物体の投影および/または影の測定に基づいて3次元測定結果を取得すること。前記方法の別態様において、前記方法は投影および/または影の測定に基づいて3次元モデルまたはマップを作成するステップをさらに含む。一連のアルゴリズムは、本発明の方法を処理するためにも提供される。少なくとも1つの3次元物体の単一画像から、3次元測定情報を導出し、かつ/または3次元モデルおよびマップを作成するための、コンピュータシステムおよび関連コンピュータプログラムも、開示した方法に基づいて提供される。 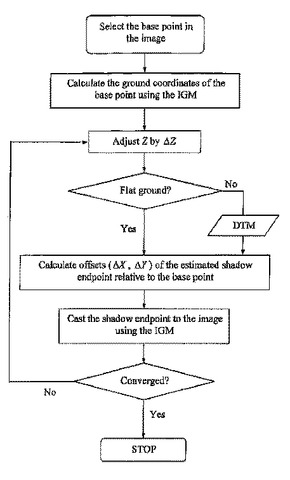 (もっと読む)
(もっと読む)
3D自動測量装置
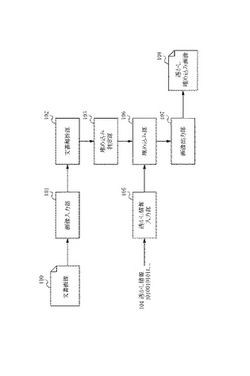
360度全周囲カメラで得られる動画映像を解析して、画像内の任意の対象物について高精度な三次元計測を行う。所望の計測点と座標が既知の基準点を含む動画像を撮影する周囲画像撮影部101と、撮影画像を記録する画像記録部102と、画像内の映像的な特徴点を抽出する特徴点抽出部103と、画像内の計測点を自動抽出する計測点特定部104と、画像内の基準点を自動抽出する基準点特定部105と、計測点,基準点,特徴点を各フレーム画像内で対
応付ける対応点追跡部106と、対応付けられた計測点,基準点,特徴点の三次元相対座標を演算するベクトル演算部107と、上記演算を繰り返して三次元相対座標を統計処理する誤差最小化処理部108と、基準点の既知座標により三次元相対座標を絶対座標系に変換する絶対座標取得部109と、最終座標を記録する計測データ記録部110と、記録された計測データを表示する表示部111とを備える。
(もっと読む)
映像に基づいたフォトリアリスティックな3次元の顔モデリング方法及び装置
【課題】 映像に基づいたフォトリアリスティックな3次元の顔モデリング方法及び装置を提供する。
【解決手段】 描写された多角形のメッシュモデルによって表現される3次元のフォトリアリスティックな顔モデル生成方法において、入力映像の正面及び側面の顔映像内の顔特徴を検出する段階と、特定顔の3次元形状を決定するために、検出された顔特徴を利用して初期モデルを変形させて3次元の顔モデルを生成する段階と、入力映像からフォトリアリスティックなテクスチャを生成する段階と、前記テクスチャを前記3次元モデル上にマッピングする段階と、を含むことを特徴とする3次元の顔モデリング方法。これにより、デジタルカメラのように相対的に高価ではない装置を利用してデータを獲得し、可能な限り自動化を具現して、完全でない入力データから望ましく実際の人間らしい顔のモデ
リング方法を提供する。
(もっと読む)
配線基板検査装置及び方法
【課題】絶縁ワニスで被覆した絶縁電線を接着剤層を固定することによって製造されるマルチワイヤ配線基板に対する検査を高速で確実に検査する。
【解決手段】マルチワイヤ配線基板に光を垂直に照射し、色フィルタで所定の波長の光を選択し、撮像カメラによって色フィルタで選択した光マルチワイヤ配線基板の全面を撮像し、この全面の画像に所定の画像処理を施すことによって、絶縁電線の始点部、終点部が所定の領域内に入っているかの検査と始点部と終点部の間の経路の配線不良の検査を高速で確実に実現する。
(もっと読む)
381 - 396 / 396
[ Back to top ]