
Fターム[5D096FF06]の内容
トラック探索、整列のためのヘッド移動 (3,141) | TESメモリ、オフセット値メモリの使用 (93) | メモリ出力とTESを合成するもの (10)
Fターム[5D096FF06]に分類される特許
1 - 10 / 10
周回メモリ、及びディスク装置
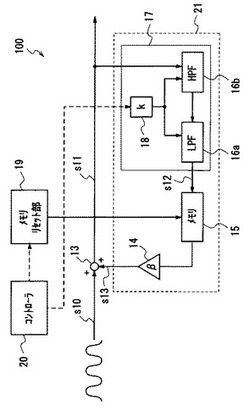
【課題】メモリに記憶された情報と被補償信号に大きな差が生じた場合でも、不要な学習を回避でき、目標値の追従性能を損なわない周回メモリ、及び該周回メモリを備えるディスク装置を提供する。
【解決手段】入力される被補償信号の1周期分を記憶するメモリ15を0クリアするメモリリセット部19を備え、コントローラ20を介してディスク装置の状態に応じてメモリ15に記憶された信号情報のリセットを自在に行えるようにした。
(もっと読む)
磁気ディスク装置、磁気ディスク再生方法およびプログラム

【課題】書込時と読取時のヘッドの位置ずれ量を低減することができる磁気ディスク装置を提供すること。
【解決手段】磁気ディスクのトラックにデータを磁気的に書き込む書込部の、データ書込時におけるトラック幅方向の位置を示す位置情報を記憶する位置情報記憶部と、磁気ディスクの再生対象のトラックである再生対象トラックを読み取る読取部と、位置情報記憶部が記憶している位置情報が示す位置に基づいて、読み取り時における読取部の、再生対象トラックのトラック幅方向の位置を制御する位置制御部とを備える。
(もっと読む)
磁気ハードディスクドライブおよびその運転方法
【課題】 実行処理の高速化と記憶スペースの削減とを図りつつ、HDDにおけるRROの影響を最小限にする。
【解決手段】 トランスデューサ13からの位置信号75は、基準位置信号70と加算(引算)され、位置エラー信号(PES)80が得られる。PES80は、現サーボウェッジにおける現補正の実行のために制御部60に入力されると共に、フィードフォワードアルゴリズム部50にも入力される。フィードフォワードアルゴリズム部50は、RROのみに起因するトランスデューサ位置ずれ分を示すフィードフォワード値を反復合算により算出し、その結果を、その次のサーボウェッジ用のフィードフォワードRRO補正項として出力する。このフィードフォワードRRO補正項は、制御部60から出力される補償出力と加算され、その加算結果100が、制御信号としてプラント200のボイスコイルモータに供給される。
(もっと読む)
磁気ディスク装置、パターンドディスクおよびパターンドディスクへのアクセスの制御方法
【課題】記録トラック形状の歪みに因る記録/再生への影響を低減する。
【解決手段】記録媒体であるパターンドディスクを同心円状に配置された複数の記録トラックと記録トラックの高次偏心を検出するための磁性パターンが形成された偏心検出用トラックとを有するものとし、偏心検出用トラックの読み取りによって得られた当該偏心検出用トラックの偏心状態を示す実測偏心プロファイルを記憶するメモリと、任意の記録トラックへのアクセスに際して、メモリの実測偏心プロファイルを参照し、当該記録トラックの偏心状態を予測して当該記録トラック対するトラッキング制御を実行する制御手段とを磁気ディスク装置に備えさせる。
(もっと読む)
ディスクドライブのウェッジ毎のWORF決定
【課題】新規且つ改善された、ディスクドライブのウェッジ毎のWORF決定方法。
【解決手段】サーボ情報の複数のウェッジを有するディスクの表面上にトラックを配置する方法は、第1のサーボウェッジについてのサーボ情報を復調すること(810)、及び第2のサーボウェッジについてのサーボ情報を復調する前に、第1のサーボウェッジについてのサーボ情報に対する反復可能な書き込みランアウトの補正因子を決定すること(812)を含む。機械読み取り可能なメディアは、上記方法を実行する命令を提供する。ディスクドライブは、上記方法を実行し、トランスデューサを所望のトラック上に配置するための信号を生成するプロセッサディスクを含む。
(もっと読む)
ディスク・ドライブ装置及びそのエラー回復処理方法
【課題】容量及びパフォーマンスの低下を抑えつつ、リード・エラー回復を図る。
【解決手段】本発明の一実施形態において、HDDは、通常リード処理において磁気ディスク上のRRO補正情報を使用することなくフォローイング制御を行う。通常リード処理においてエラーが発生(S11、S12)した場合に、HDDは、リード素子を通常リード処理のターゲット位置と異なる位置に移動する(S23)。移動先において、リード素子によりRRO補正情報を読み出す(S14、S15)。エラーが起きたリード処理の回復処理において、リード素子が読み出した前記サーボ補正情報による補正を伴うフォローイング制御を行う(S17)。
(もっと読む)
突発外乱推定装置及びトラッキング制御装置、並びに、トラッキング制御装置における突発外乱推定方法
【課題】 突発外乱を推定し補償を行うことで、突発外乱によるディスクのトラック位置への追従性能を損なわないトラッキング制御装置を提供する。
【解決手段】 トラッキング制御装置1は、フィードバック制御系2に、トラッキング誤差信号を逐次記憶し遅延させるトラッキング誤差遅延制御手段31と、遅延させたトラッキング誤差信号と現時点におけるトラッキング誤差信号との差分に基づいてトラッキング誤差を生成する外乱トラッキング誤差生成手段33aと、操作量を逐次記憶し遅延させる操作量遅延制御手段32と、遅延させた操作量と現時点における操作量との差分に基づいて操作量誤差を生成する外乱操作量誤差生成手段33bと、トラッキング誤差と操作量誤差とに基づいて突発外乱を補償する突発外乱量を算出する外乱演算手段33cとを備えた突発外乱推定装置3を付加したことを特徴とする。
(もっと読む)
繰り返し制御系及びこれを含むドライブサーボシステム
本発明は一般に半波対称性を有する周期信号を抑圧する繰り返し制御系の分野に関し、特に周期NTの周期信号を供給されるメモリループとして構成される繰り返し制御系であって、メモリの大きさとしてN/2個のメモリ素子を含み、負のフィードバック接続を適用し、メモリループの出力において係数−1/2を設定することを特徴とする繰り返し制御系に関する。このような繰り返し制御系は例えば記録媒体にデータを記録するヘッドを有する記録再生装置におけるドライブサーボシステムの外乱補正モジュールにおいて適用されうる。  (もっと読む)
(もっと読む)
ヘッド位置制御用補正テーブル作成方法、ヘッド位置制御方法およびディスク装置
【課題】ディスクの回転に同期した成分をヘッド制御量から補正して、ヘッドを位置制御するヘッド位置制御方法において、補正後の回転同期成分が最小となる加算ゲインを理論的に得る。
【解決手段】位置信号中のディスク(4)の回転に同期した成分と前記ディスク(4)の回転に同期しない成分との大きさの比に基づいて調整されたゲインを用いる。補正後のRROを求める式を用いて補正後のRROを最小にするゲインを理論的に求めることができる。実験に頼らずとも、ゲインを決めることができ、また、補正後のRROがいくらになるのかを保証でき、製造時間や装置仕様を定めることができる。
(もっと読む)
反復的なランアウト補償方法,記録/再生装置,記録/再生方法,および記録媒体
【課題】 HDDに対して反復的なランアウト補償器の個数及びゲインを最適化させるための方法,記録媒体及び装置を提供する。
【解決手段】 記録/再生装置における反復的なランアウトを補償する方法において:
記録/再生装置に備えられる記録媒体の各ゾーンに対して,ゾーンに適用するPRO補償器の個数を変化させて,各々異なる個数のPRO補償器をゾーンに適用した状態でゾーンでの位置エラー信号のサイズを測定する過程と;測定されたサイズのうち,最小サイズの位置エラー信号に該当するRRO補償器の個数を,それぞれの相応するゾーンに対するRRO補償器の最適個数として決定する過程と;を含む,反復的なランアウト補償方法を提供する。
(もっと読む)
1 - 10 / 10
[ Back to top ]