
Fターム[5H004GA10]の内容
フィードバック制御一般 (10,654) | 目的 (1,567) | むだ時間対策 (14)
Fターム[5H004GA10]に分類される特許
1 - 14 / 14
ネットワーク型制御システム、およびネットワーク型制御システムにおける通信遅延時間制御方法
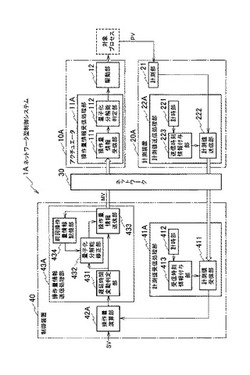
【課題】通信遅延時間の変動を抑制しながら制御性能を維持してフィードバック制御によるプロセス管理を実行することが可能なネットワーク型制御システム、およびネットワーク型制御システムにおける通信遅延時間制御方法を提供する。
【解決手段】ネットワーク型制御システムは、管理対象プロセスの状態を制御する制御対象機器と、対象プロセスの状態量を計測する計測装置20Aと、制御対象機器および計測装置20Aにネットワーク30を介して接続され、計測装置20Aによる管理対象プロセスの状態量の計測値に基づいて制御対象機器をフィードバック制御する制御装置40とを有する。このネットワーク型制御システムは、ネットワークにおける通信遅延時間を演算する手段と、通信遅延時間が所定値以上になったときに、前記フィードバック制御を行うために前記ネットワークに送出する情報量を低減させる手段とを備える。
(もっと読む)
フィードバック制御装置

【課題】制御開始時の値付近での実制御量の停滞による応答遅れの増大が発生したときの実制御量のオーバーシュートを好適に抑制することのできるフィードバック制御装置を提供する。
【解決手段】第2ピストンの実変位RYを含むCSC2の状態量の検出及び推定を行うオブザーバー6と、目標軌道に追従して実変位RYが推移するように上記状態量に基づきマスターシリンダー1の供給電流を操作するとともに、実変位RYと目標軌道との偏差Eの累積値である誤差積分値Zに応じて供給電流を操作する積分器5を有したスライディングモードコントローラー4と、を備えるフィードバック制御装置において、実変位RYが制御開始時の値付近で停滞しているか否かを判定するとともに、停滞有りと判定されたときに、目標軌道及び推定状態量X0,X1,X2の初期化を指示する停滞監視部7を備えるようにした。
(もっと読む)
制御装置
【課題】むだ時間や応答遅れが変化する特性を備えた制御対象を制御する場合において、制御精度を向上させることができる制御装置を提供する。
【解決手段】制御装置1のECU2は、4個のむだ時間dがそれぞれ経過したタイミングでの制御量として、4個の予測値PRE_KACT_4-iを算出し、排ガスボリュームVexに対応する4個の重み関数値Wdiを算出し、重み関数値Wdiを予測値PRE_KACT_4-iにそれぞれ乗算することにより、4個の乗算値Wdi・PRE_KACT_4-iを算出し、4個の乗算値Wdi・PRE_KACT_4-iの総和を予測当量比PRE_KACTとして設定し、予測当量比PRE_KACTが目標当量比KCMDになるように、空燃比補正係数KAFを算出する。
(もっと読む)
プロセス制御装置、プロセス制御方法およびプロセス制御プログラム
【課題】むだ時間を有する制御対象に対して、オーバーシュートが小さく、整定時間が短く、さらに外乱抑制特性および設定変更特性が良好なプロセス制御装置を提供することを目的とする。
【解決手段】制御対象2について検出される制御量PVが入力され、制御量に基づき、制御量を調整するための操作量MVを出力して制御量を所定の目標値に制御するプロセス制御装置1であって、目標値から制御量を減算する第1減算部3と、第1減算部からの出力値を積算する積算部4と、積算部の出力値を定数倍する第1乗算部5と、制御開始時における制御量である初期制御量を保存する初期制御量記憶部7と、初期制御量記憶部に保存された初期制御量から現時点の制御量を減算する第2減算部8と、第2減算部からの出力値を定数倍する第2乗算部9と、第1乗算部の出力値と第2乗算部の出力値とを加算して操作量として出力する加算部10とを備える。
(もっと読む)
信号処理回路、AGC回路、および記録再生装置
【課題】無駄時間のループ特性に対する影響を応答性良く補償することが可能な信号処理回路、AGC回路、および記録再生装置を提供する。
【解決手段】負帰還パス120は、制御信号を生成してメインパス110の入力信号の入力部に供給する負帰還ブロック121と、負帰還ブロックの制御信号が供給され擬似実信号を出力するメインパスブロック111のレプリカブロック122と、レプリカブロックの擬似実信号をループの無駄時間分遅延させる信号遅延ブロック123とを含み、負帰還ブロックとレプリカブロックと信号遅延ブロックとを含んで無駄時間を含む第1のローカル負帰還系ループ126が形成され、負帰還ブロックおよびレプリカブロックにより無駄時間のない第2のローカル負帰還系ループ127が形成され、第1のローカル負帰還系ループは信号遅延ブロックの出力信号と実信号の合成信号を負帰還ブロックに入力させる。
(もっと読む)
むだ時間補償制御装置
【課題】制御対象だけでなく、制御装置内のむだ時間を補償することにより、制御系の安定性向上を図ったむだ時間補償制御装置を得る。
【解決手段】出力Y(s)のフィードバック値と目標値U(s)との偏差は制御装置1に入力されると同時に、制御装置むだ時間補償器6に入力され、制御装置むだ時間補償器6で求められた補償信号Pc(s)がむだ時間を経た制御量にフィードフォワード制御される。この結果得られる制御装置むだ時間e−Lc・sを補償後の制御量は、制御対象2に入力されると同時にスミス補償器4に入力され、求められた補償信号Pp(s)が制御装置1の前段にフィードバックされる。
(もっと読む)
インバータシステムの無駄時間補償装置
【課題】制御対象に非線形要素を含んでいても、直接制御対象モデルに組み込んでスミス予測器を具備した無駄時間補償装置及びその方法を提供する。
【解決手段】無駄時間を有する制御対象として、当該制御対象におけるフィードバック制御系の安定性を保つための無駄時間補償装置であって、非線形要素を含む制御対象G(s)e-sLと同じ応答特性を有するモデル回路P(s)を、オペアンプ回路によるアナログ計算機、又はFPGA回路のハードウエア回路で実装したスミス予測器を具備し、前記モデル回路P(s)に、前記制御対象と同じ信号を入力して出力信号を取得し、前記取得した出力信号をフィードバック制御系に負帰還させ、さらに前記取得した出力信号を、前記制御対象と同じ無駄時間要素e-sLに入力し、前記入力した無駄時間要素e-sLの出力信号と前記制御対象の出力信号の差分信号を、フィードバック制御系に負帰還させている。
(もっと読む)
むだ時間同定装置
【課題】 制御対象の特性によらず、容易にかつ確実に正確にむだ時間を同定することができるようにする。
【解決手段】 モータ速度を入力し前記モータ速度が発振しているかどうかを判定した結果を示す発振検出信号を出力する発振検出器106と、前記モータ速度を入力しその入力信号に基づいて制御対象のメカパラメータを同定し出力するメカ同定器107と、前記発振検出信号を入力し前記モータ速度は発振していなければ速度制御器に設定するパラメータである制御ゲインをさらに大きい値として出力する制御ゲイン調整器108と、制御ゲインと発振検出信号とメカパラメータを入力し臨界周波数を出力する臨界周波数演算器109と、前記制御ゲインと前記発振検出信号と前記メカパラメータと前記臨界周波数を入力しむだ時間同定値を算出するむだ時間同定器110と、を備える。
(もっと読む)
制御装置及び制御方法
【課題】制御上の無駄時間が生じていたとしても、簡易な構成で、制御を開始してから制御対象を目標値に設定するまでの整定時間を短縮することができる制御装置及び制御方法を提供する。
【解決手段】制御装置は、第1の温度センサ2から検出された第1の値を取得する第1の取得部12と、第1の温度センサ2に比して制御対象物の近くに配置された第2の温度センサ3から検出された第2の値を取得する第2の取得部13と、前記第2の値と予め設定された目標値とを比較した比較結果に応じて、入力値を前記第1の値と前記第2の値とで切り替える切り替え部17と、目標値と入力値の偏差に基づいて前記制御対象物の状態を制御するPID制御部16と、を備える。
(もっと読む)
制御装置および異常判定装置
【課題】むだ時間の変化を逐次推定し高精度な制御を実施することができる制御装置を提供する。
【解決手段】制御対象を離散数式モデルで表したプラントモデルを用い、該プラントモデルに制御対象への入力を加えた際の出力であるプラントモデル出力と制御対象の実出力との差である同定誤差をゼロに近づけるようにプラントモデルのパラメータを同定する。このとき、同定処理により算出された離散モデルパラメータ、若しくは離散モデルパラメータに基づいて算出されるむだ時間以外のパラメータの変化により、むだ時間の信頼性を判定することで、むだ時間を精度良く算出することが可能となる。
(もっと読む)
プロセス制御装置、プロセス制御方法、プログラム、およびプログラムを記録したコンピュータ読み取り可能な記録媒体
【課題】時定数に比べてむだ時間が大きい制御対象に対して、目標値追従特性と外乱抑制特性とを良好にすることができるプロセス制御装置を実現する。
【解決手段】プロセス制御装置20は、現在の制御量を入力として、現在から所定時間経過後の制御量の予測値を出力する予測演算部26と、制御目標値と制御量の予測値との偏差を入力として、当該偏差に対して、比例演算、積分演算、微分演算のうちいずれか1つ以上の演算を行った結果を操作量として出力する調節部22とを備える。
また、予測演算部26は、現在の制御量を一定時間遅延させた制御量を出力する遅延部261と、遅延部261からの出力値を現在の制御量から減算する減算部262と、減算部262からの出力値を所定の値で除算する除算部263と、除算部263からの出力値に所定の値で乗算する乗算部264と、現在の制御量に乗算部264からの出力値を加算する加算部265とを備える。
(もっと読む)
長いむだ時間を有するプロセスのためのファジー論理制御
長いむだ時間を有するプロセスを制御するための制御システム、方法及びコンピュータプログラム製品が提供される。発明にしたがう実施形態によって制御され得るプロセスの一例はガラス製造プロセスであり、原材料が炉に入るレートを制御することによってガラス製造プロセス中に炉内の溶融原材料及び溶融中原材料の液面レベルを制御するためにファジー論理が用いられる。  (もっと読む)
(もっと読む)
制御装置
【課題】プラントモデルがむだ時間を含む2次以上の高次遅れ系であっても、演算負荷を従来より軽減できるようにする。
【解決手段】制御対象(触媒+下流側排気ガスセンサ)を模擬するプラントモデルは、むだ時間を含む2次遅れ系で近似すると共に、2次遅れ系は、2つの1次遅れ系に分割して離散化した後結合して近似する。制御対象の入力をプラントモデルに入力した時のプラントモデル出力と制御対象の実出力との差である同定誤差をゼロに近付けるようにモデルパラメータを同定する。同定したモデルパラメータに含まれるむだ時間の一部の情報の変化に基づいてむだ時間を制御対象の実むだ時間に近付けるように推定する。
(もっと読む)
制御装置
【課題】制御対象の非線形特性および周波数特性の少なくとも一方が変化したときでも、制御分解能および制御精度をいずれも高いレベルに維持することができる制御装置を提供すること。
【解決手段】位相制御入力Ucainによりカム位相Cainを制御する制御装置1は、2つのコントローラ102,103を備える。2自由度応答指定型コントローラ102では、追従制御入力Rsldが、カム位相を目標カム位相Cain_cmdに追従させるように制御するための値として算出される。DSMコントローラ103では、追従制御入力Rsldを変調することにより、位相制御入力Ucainが算出されるとともに、その際、位相制御入力Ucainの演算周期が、エンジン回転数NE、カム位相CainおよびバルブリフトLiftinに応じて、2つの演算周期ΔT1,ΔT2の中から選択される。
(もっと読む)
1 - 14 / 14
[ Back to top ]