
Fターム[5H004GA11]の内容
フィードバック制御一般 (10,654) | 目的 (1,567) | 積分飽和防止(アンチリセットワインドアップ) (15)
Fターム[5H004GA11]に分類される特許
1 - 15 / 15
アクチュエータの制御装置
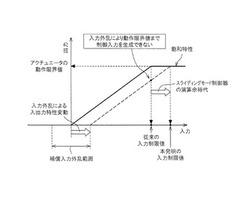
【課題】アクチュエータの動作限界付近での入力外乱抑圧性能を向上させる。
【解決手段】入力外乱抑圧性能を持つフィードバック制御器(スライディングモード制御器)と、そのフィードバック制御器で生成した制御入力と入力制限値との差にゲインを乗じた値を上記フィードバック制御器の入力側にフィードバックするアンチワインドアップ制御器とを備えたアクチュエータの制御装置において、上記入力制限値を、アクチュエータの動作限界値から決定される入力量に、入力外乱抑圧性能を持つフィードバック制御器で補償すべき入力外乱を加えた値に設定する。このような設定により、アクチュエータの動作限界値まで制御入力の演算が可能になり、その動作限界付近での入力外乱抑圧性能が向上する。
(もっと読む)
モータ駆動制御装置

【課題】制御入力の飽和による制御性能劣化や制御系の不安定化を確実に防止できるモータ駆動制御装置を得ること。
【解決手段】参照位置偏差算出部4aは制御入力計算部7の出力と入力との関係に基づいて、制御入力hが参照制御入力bに一致するための参照位置偏差dを算出する。位置補正量算出部5aは参照位置偏差dの絶対値が位置偏差eの絶対値よりも小さい場合、位置補正量fを位置偏差eが前記参照位置偏差dと一致するように算出して出力し、参照位置偏差dの絶対値が位置偏差eの絶対値よりも大きい場合は、前記位置補正量fをゼロにして出力する。指令値整形部6aは位置偏差eから位置補正量fを引き算して生成した修正位置偏差gを制御入力計算部7の入力信号とする。
(もっと読む)
システムを制御するためのコントローラおよびコントローラを有するシステムを制御する方法
【課題】ハイブリッドコントローラの状態をリセットする方法及びシステムを提供する。
【解決手段】コントローラは、フィードフォワード成分azrを生成するフィードフォワードモジュールと、比例成分Kpvzを生成する比例モジュールと、積分又は遅れ成分を生成する、状態リセットを有する積分又は遅れモジュールとを含む。ここで、aは高周波利得であり、Kpvは比例利得である。フィードフォワード成分azr、比例成分Kpvz、及び積分成分Kivzcは、制御されるシステムに対する入力uとして結合される。
(もっと読む)
温度制御方法および波長変換レーザ装置
【課題】電源投入直後に温度制御対象の温度が目標温度よりも行き過ぎて高くなることを抑制する。構成を簡単化する。
【解決手段】設定温度(Ts’)と対象温度(Tx)の偏差(ΔT)に基づいてペルチェ素子(27)をPID制御するPID回路(25)と、電源投入時には環境温度(Tc)を設定温度(Ts’)とし次いで所定の時定数の一次遅れの関数で環境温度(Tc)から目標温度(Ts)へと設定温度(Ts’)を変化させる温調回路(20)とを具備する。
【効果】偏差(ΔT)が常に小さな値に維持されるから過積分により電源投入直後に対象温度(Tx)が目標温度(Ts)よりも行き過ぎて高くなることを抑制できる。構成を簡単化でき、電池駆動などの小型でポータブルな波長変換レーザ装置においても有用である。
(もっと読む)
PID制御方法及びPID制御装置
【課題】オーバーシュートが少なく、かつ計算工程が少ないPID制御装置及びPID制御方法を提供すること。
【解決手段】予め設定される目標値と制御対象から得られる測定値との偏差により操作量を算出するPID制御方法において、
前記制御対象に基づいて設定されるパラメータにより決定された制御可能範囲内において、目標値と測定値との偏差より偏差変化速度を決定し、
前記偏差変化速度から偏差変化速度の最大値を決定し、
前記偏差変化速度の最大値、前記偏差、ARW及び比例帯に基づいてオーバーシュートを生じさせないで目標値に到達することのできる理想偏差変化速度を算出し、
前記偏差変化速度と前記理想偏差変化速度とに基づいて補正偏差を算出してこの補正偏差をI演算に用いることを特徴とするPID制御方法及び装置。
(もっと読む)
位置決め制御システム及びフィルタ
【課題】外乱オブザーバを用いることにより制御精度を向上させるとともに、ワインドアップ現象を防止する。
【解決手段】位置決め制御システム10は、制御対象Pのシリンダ12の進退量Yから外乱Dを推定してフィードバックを行う外乱オブザーバ46と、該外乱オブザーバ46によるフィードバックループ内に設けられた飽和要素48及び低域通過要素Qと、飽和要素48の飽和値Lを偏差εに基づいて変化させる飽和値変更部50とを有する。飽和要素48は正帰還のマイナーループ70内の前向き通路に設けられている。低域通過要素Qは正帰還のマイナーループ70内のフィードバック通路に設けられている。
(もっと読む)
サーボシステムの制御装置および制御方法
【課題】 直列にPI制御器とP(又はPD)制御器が結合されている位置サーボシステムにおいて、速度PI制御器と位置P制御器の制御帯域が近づいた場合においても、高速位置決め制御時に行き過ぎ量や振動の量を低減することができるサーボシステムの制御装置および制御方法を得る。
【解決手段】 PI制御器を有するサーボシステムの制御装置において、PI制御器の操作量が制限値の値に到達したとき、積分制御の操作量の飽和分を求めて、積分制御の積分器にフィードバックして、積分制御の状態変数を同サンプリング内に再計算し、再計算した状態変数の値を次サンプリングに使用するために保存するようにしたものである。
(もっと読む)
アンチワインドアップコントローラ
【課題】 コントローラ設計時にアンチワインドアップ補償のための特別な設計が不要であり、かつ制御演算実行時の計算負荷が小さくて演算量が安定しているアンチワインドアップコントローラを提供する。
【解決手段】 コントローラからの操作量を監視して操作量飽和の発生が予測される時に、実時間操作量が操作量の制限値(上限と下限のいずれか一方又は両方)と等しくなるように仮想時間操作量から時間軸関数値を算出して時間軸変換を行うことにより、操作量飽和をそもそも発生させないようにする。そのため、仮想時間操作量が操作量の制限値を満足しているかどうかの判定により操作量飽和を生じていない場合には、時間軸関数値を1とし、操作量飽和を生じていると判定された場合には、実時間操作量の要素の少なくとも1つが前記操作量の制限値の対応する要素と等しくなるように仮想時間操作量から時間軸関数の値を算出し、その関数値に基づいて仮想時間操作量を、操作量飽和を生じていない実時間操作量に変換する。
(もっと読む)
制御装置
【課題】積分ワインドアップを防止し、従来のパラメータ調整方法や自動調整機能の適用を可能にする。
【解決手段】制御装置は、制御偏差を算出する制御偏差算出部23−1〜23−3と、3個の制御偏差を状態量変換行列により各制御偏差を線形結合した値に変換する制御偏差変換部26と、変換された各制御偏差にそれぞれ対応する重み係数を乗算する重み係数設定部27−1〜27−3と、重み係数が乗算された各制御偏差を状態量変換行列の逆行列により再変換する逆行列再変換部28と、再変換された各制御偏差に基づき各制御ループの操作量を算出する制御演算部25−1〜25−3と、制御偏差算出部23−1〜23−3に入力される状態量設定値に対して急変動を抑制するフィルタリング処理を施す状態量フィルタリング設定値算出部29−1〜29−3とを備える。
(もっと読む)
制御方法および制御装置
【課題】積分ワインドアップを防止し、従来のパラメータ調整方法や自動調整機能の適用を可能にする。
【解決手段】特定の状態量を基準状態量とし、基準状態量との相対量が規定値を維持するように制御される状態量を追従状態量とする。制御装置は、PID制御演算部4−1〜4−3と、追従状態量設定値を追従状態量内部設定値に変換する算出部6−1〜6−3と、追従状態量内部設定値をローパスフィルタリング処理する内部設定値フィルタ部10−1〜10−3を備える。算出部6−1〜6−3は、追従状態量内部設定値を基準状態量に対する第1の要素と相対量に対する第2の要素との和とし、基準状態量に対する制御演算用入力値の要素を第1の要素とし、相対量に対する制御演算用入力値の要素に第1の係数を掛けた値を第2の要素とすることで、追従状態量内部設定値を算出する。
(もっと読む)
制御方法および制御装置
【課題】積分ワインドアップを防止し、従来のパラメータ調整方法や自動調整機能の適用を可能にする。
【解決手段】特定の状態量を基準状態量とし、基準状態量との相対量が規定値を維持するように制御される状態量を追従状態量とする。制御装置は、PID制御演算部4−1,4−2,4−3と、追従状態量設定値にフィルタリング処理を施す算出部10−1,10−2,10−3と、フィルタリング処理された追従状態量設定値を内部入力値に変換する算出部6−1,6−2,6−3を備える。算出部6−1,6−2,6−3は、内部入力値を基準状態量に対する第1の要素と相対量に対する第2の要素との和とし、基準状態量に対する制御演算用入力値の要素を第1の要素とし、相対量に対する制御演算用入力値の要素に第1の係数を掛けた値を第2の要素とすることで、内部入力値を算出する。
(もっと読む)
半導体製造装置の制御方法
【課題】制御対象から出力される制御量を迅速且つ正確に目標値へ変化させ、半導体製造装置によるプロセス処理の精度を向上させる。
【解決手段】半導体製造装置に備えられた制御対象2へ入力する操作量Yを変化させることにより当該制御対象2による制御量PVを変化させ、操作量Yを変化する制御量PVに基づいた比例・積分・微分演算又は比例・積分演算12による帰還処理を行って制御し、制御量PVを目標値SVへ変化させる半導体製造装置の制御方法において、操作量YSと制御対象の安定時の制御量SVとの関係を予め求めておき、目標値SVと時々刻々の制御量PVとの間に所定値α、β以上の偏差eが生じた場合に、積分演算13による帰還処理で得られる操作量YIに換えて、目標値SVあるいは制御量PVにおける予め求められた操作量YSを比例・微分演算又は比例演算による帰還処理で得られる操作量YPDに加え、この加算した操作量Yを制御対象2へ入力する。
(もっと読む)
コントローラ
コントローラ(1)は、誤り信号(ER)を得るために入力信号(VO)と基準信号(Vr)とを比較するコンパレータ(10)を備えている。積算器(11)は、上記誤り信号(ER)に対して積算動作を適用して制御信号(ICO)を得る。積算器(11)は積算動作に関して影響を与えられる。コピー回路(81)は、制御信号(ICO)に比例するコピー制御信号(ICOC)を供給する。決定回路(85)は、コピー制御信号(ICOC)が限界値(IMIN,IMAX)に達するかどうかを決定する。影響回路(83)は、コピー制御信号(ICOC)が限界値(IMIN,IMAX)に達するときに制御信号(ICO)を制限するために積算動作に影響を与える。  (もっと読む)
(もっと読む)
制御方法
【課題】積分ワインドアップを防止し、従来のパラメータ調整方法や自動調整機能の適用を可能にする。
【解決手段】各制御ループの状態量の加重平均値を基準状態量、基準状態量との相対量が規定値を維持するよう制御される状態量を追従状態量とする。制御装置は、追従状態量を制御する演算部4−1,4−2,4−3のうち制御上の制約を受けていないループの演算部が相対量の乱れを整える制御をより強く要求されるように、加重平均値の加重を修正する加重算出部11と、演算部に入力される制御演算用入力値を内部入力値に変換する算出部6−1,6−2,6−3を備える。算出部は、内部入力値を基準状態量に対する第1の要素と相対量に対する第2の要素との和とし、基準状態量に対する制御演算用入力値の要素を第1の要素とし、相対量に対する制御演算用入力値の要素に所定の第1の係数を掛けた値を第2の要素とする。
(もっと読む)
制御装置
【課題】積分ワインドアップを防止し、従来のパラメータ調整方法や自動調整機能の適用を可能にする。
【解決手段】制御装置は、制御偏差を算出する制御偏差算出部23−1〜23−3と、3個の制御偏差を状態量変換行列により各制御偏差を線形結合した値に変換する制御偏差変換部26と、変換された各制御偏差にそれぞれ対応する重み係数を乗算する重み係数設定部27−1〜27−3と、重み係数が乗算された各制御偏差を状態量変換行列の逆行列により再変換する逆行列再変換部28と、再変換された各制御偏差に基づき各制御ループの操作量を算出する制御演算部25−1〜25−3と、制御上の制約を受けていない制御ループの制御演算部が相対制御偏差の乱れを整える制御をより強く要求されるように、状態量変換行列および逆行列を適応的に修正する行列修正部32とを備える。
(もっと読む)
1 - 15 / 15
[ Back to top ]