
Fターム[5H004HB13]の内容
フィードバック制御一般 (10,654) | 検出量の種類 (1,307) | 比率 (10)
Fターム[5H004HB13]に分類される特許
1 - 10 / 10
制御装置
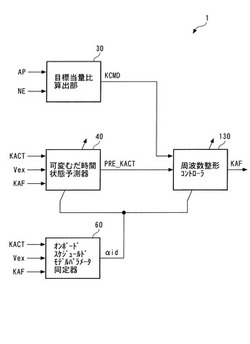
【課題】むだ時間や応答遅れが変化する特性を備えた制御対象を制御する場合において、制御精度を向上させることができる制御装置を提供する。
【解決手段】制御装置1のECU2は、4個のむだ時間dがそれぞれ経過したタイミングでの制御量として、4個の予測値PRE_KACT_4-iを算出し、排ガスボリュームVexに対応する4個の重み関数値Wdiを算出し、重み関数値Wdiを予測値PRE_KACT_4-iにそれぞれ乗算することにより、4個の乗算値Wdi・PRE_KACT_4-iを算出し、4個の乗算値Wdi・PRE_KACT_4-iの総和を予測当量比PRE_KACTとして設定し、予測当量比PRE_KACTが目標当量比KCMDになるように、空燃比補正係数KAFを算出する。
(もっと読む)
車両の駆動力制御装置

【課題】未来の運転者操作量(換言すれば運転負担)と未来の燃料消費量を予測し、状況の変化に応じてそれらを同時に最小化あるいは最適化することを可能とするようにした車両の駆動力制御装置を提供する。
【解決手段】エンジンでフューエルカットが実行されるときと否とに分けてモデリングされると共に、状態方程式で記述された、エンジンから車体までを制御対象として変速比とエンジン回転数を車速に基づいて算出される代表目標変速比と燃費最適作動線に従って算出される目標エンジン回転数にフィードバック制御する変速比制御系とを備え、アクセルペダル開度とブレーキペダル開度の現時刻からnステップ未来までの運転者操作量の総和を評価する運転者操作量評価関数などに従って状態xの変化が最適となるように予めオフラインで生成された最適解群を検索して代表変速比を修正し、操作量として制御対象に加える。
(もっと読む)
内燃機関の空燃比制御装置
【課題】経年変化によらず内燃機関の運転状態を正確に判定し、判定された運転状態に応じて高精度な制御が可能な内燃機関の空燃比制御装置を提供する。
【解決手段】内燃機関の空燃比制御装置が、実際の燃料噴射量である実燃料噴射量u及びその噴射による空燃比である実空燃比yを保存する記憶手段と、保存された実燃料噴射量u及び実空燃比yに基づいて所定時間経過後の内燃機関の運転状態である先読み運転状態fcを推定する運転状態推定手段と、保存された実燃料噴射量u及び実空燃比y並びに先読み運転状態fcに基づいて前記所定時間経過後の空燃比である先読み空燃比faを推定する空燃比推定手段と、先読み空燃比faに基づいて燃料噴射量を補正する燃料噴射量補正手段とを具備する。
(もっと読む)
モデル予測制御を使用した離散供給チェーンの制御および最適化のためのシステムおよび方法
システムは、1つの処理設備100、500に関連する複数の処理110、510〜570を監視し、処理設備を最適化するための制御データを生成するよう構成された第1のコントローラ120を含む。システムは、制御データの少なくとも一部を変更するために変動計算の確率解析を使用するよう構成された第2のコントローラ130も含む。第2のコントローラは、離散供給チェーンの制御および最適化を処理設備に提供し、離散供給チェーン製造処理によって製造される製品に対する複数の需要要件および複数の出荷要件のうちの少なくとも1つを記録するよう構成されている。システムは、さらに複数の処理を制御し、処理設備を最適化するために制御データに従って動作するよう構成された複数の第3のコントローラ125a〜125fも含む。  (もっと読む)
(もっと読む)
制御装置
【課題】可変バルブリフト装置をPI制御等のI項(積分項)を用いた制御方式で制御する場合に、可変バルブリフト装置の定常時のエネルギ消費量を低減できるようにする。
【解決手段】可変バルブリフト装置が定常状態のときに、目標リフト量を揺らぎ幅Wだけ上り時間Tupで増加させた後に上り時間Tupよりも長い下り時間Tdownで減少させて元の値に戻す処理を周期的に繰り返す揺らぎ制御を実行する。この揺らぎ制御では、目標リフト量の上り時間Tupよりも下り時間Tdownを長くすることで積分項の増加量よりも減少量を多くして積分項を元の値よりも減少させる処理を繰り返すことで積分項を徐々に減少させることができるため、ヒステリシス特性によって制御デューティがエネルギ消費量の大きい方の値になった場合でも、ヒステリシス特性による積分項の増加分を徐々に減少させて、制御デューティをエネルギ消費量の小さい方の値に収束させることができる。
(もっと読む)
制御システムの構築方法及び制御システム
【課題】逆モデルに依らず、安定したフィードフォワード制御系を構築することが可能な技術を提供する。
【解決手段】本発明では、伝達関数P(z-1)を、遅延演算子z-1の多項式N(z-1),D(z-1)を用いて、P(z-1)=N(z-1)/D(z-1)で表現可能な制御対象を制御するに際し、次の方法で、制御システムを構築する。即ち、規範モデルM(z-1)を、伝達関数P(z-1)の分子N(z-1)を含む関数M(z-1)=N(z-1)・L(z-1)に設定して、所望の規範モデルM(z-1)に対応する関数L(z-1)を導出する。そして、フィードフォワード操作量uff(i)を、関数L(z-1)及び伝達関数P(z-1)の分母D(z-1)を含む式Uff(i)=D・L・r(i)に従って、算出するように、フィードフォワード制御系を構築する。このようにして、本発明では、逆モデルP-1を用いずに、フィードフォワード制御系を実現する。
(もっと読む)
制御装置および異常判定装置
【課題】むだ時間の変化を逐次推定し高精度な制御を実施することができる制御装置を提供する。
【解決手段】制御対象を離散数式モデルで表したプラントモデルを用い、該プラントモデルに制御対象への入力を加えた際の出力であるプラントモデル出力と制御対象の実出力との差である同定誤差をゼロに近づけるようにプラントモデルのパラメータを同定する。このとき、同定処理により算出された離散モデルパラメータ、若しくは離散モデルパラメータに基づいて算出されるむだ時間以外のパラメータの変化により、むだ時間の信頼性を判定することで、むだ時間を精度良く算出することが可能となる。
(もっと読む)
制御対象シミュレーション装置
【課題】少ないデータ量から多くのデータ量を生成して処理する制御対象シミュレーション技術を提供する。
【解決手段】制御対象シミュレーション装置は、時刻に対して変化し、所定の制御対象に関する物理量について、複数の時刻におけるデータを受け付け、受け付けたデータから任意の時刻に関するデータを算出し、算出される前記任意の時刻に関するデータに基づいて前記制御対象に関する物理量を制御する制御量を生成する制御装置から、前記制御量を入力し、前記任意の時刻に関するデータおよび前記任意の時刻における制御量にしたがって前記制御対象の動作を模擬し、前記任意の時刻の後の時刻におけるデータを生成する。
(もっと読む)
スライディングモード制御を用いた制御装置及び制御方法
【課題】 車両用の無段変速機等の制御に好適な、スライディングモード制御を用いた制御に関し、制御のハンチングをより確実に防止することができるようにする。
【解決手段】 無段変速機の目標変速比に応じた可動プーリの第1目標ストロークx1*を設定し、第1目標ストロークx1*に、可動プーリの実ストロークxとこの第1目標ストロークx1*との偏差e´の大きさに応じた遅れを与えて得られる第2目標ストロークx2*を用いてスライディングモード制御の切り換え関数σを設計し、この切り換え関数σに基づいてスライディングモード制御の非線形入力u´nlを演算し、演算した非線形入力を含む制御入力によりスライディングモード制御により可動プーリの位置を制御し、目標変速比状態とする。
(もっと読む)
プラントの制御装置
【課題】非線形補償器を用いた制御において、非線形補償器の非線形補償を実際の非線形特性に適合させるようにしたプラントの制御装置を提供する。
【解決手段】線形要素と非線形要素とを含んだエンジンの可変位相機構42について、線形要素に基づいた応答指定型制御アルゴリズムに従ってプラントの出力Cainを位相目標値Cain_cmdに収束させる仮入力Uslを算出する線形コントローラ110と、仮入力とプラントの非線形要素の特性を相殺するように設定された非線形補償器112に基づいて制御入力Ucainを算出するプラントの制御装置において、線形要素のみから構成される制御対象モデル114aによって算出されたプラントの出力推定値Cain_estと、プラントの出力検出値Cainの誤差e_nlとに基づいて非線形補償器112を修正する非線形特性適応器(修正手段)114とを備える。
(もっと読む)
1 - 10 / 10
[ Back to top ]