
Fターム[5H004JB18]の内容
フィードバック制御一般 (10,654) | 検出部(オブザーバを含む) (399) | 他変量から演算により求めるもの (12)
Fターム[5H004JB18]に分類される特許
1 - 12 / 12
圧力レギュレータ及び除振装置
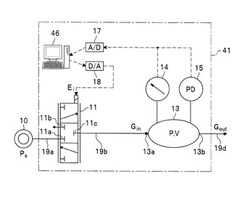
【課題】下流側に流量変動が発生した場合においても、高応答かつ高精度に圧力制御を行うことができる圧力レギュレータを提供する。
【解決手段】圧力レギュレータ41は、サーボ弁11によって、気体供給源10から供給される気体の等温化圧力容器13への流入流量を規制し、等温化圧力容器13内の圧力を一定に保持する。ここで、サーボ弁11を操作する圧力制御手段(コンピュータ46)は、圧力計14で計測した等温化圧力容器13内の圧力をフィードバック制御する圧力制御系をメインループとし、その内側に、流入流量を制御する流入流量制御系を構成すると共に、圧力微分計15で計測した等温化圧力容器13内の圧力微分値に基づいて等温化圧力容器13における流入流量と流出流量との差である流入出流量差を推定するオブザーバを構成し、推定した流入出流量差を流入流量制御系にフィードバックするモデル追従制御系を構成する。
(もっと読む)
制御装置

【課題】開発効率を改善することが可能な制御装置を提供する。
【解決手段】操作量としてのソレノイド駆動デューティduty_solの入力から制御量としての実トルクTaの出力までの過程が複数の制御要素としてのソレノイド駆動回路2、油圧制御部3、クラッチ4及びギヤトレーン5に区分可能な自動変速機1を制御対象とし、実トルクTaに対する目標値Ttに基づいてソレノイド駆動デューティduty_solを演算する制御装置11において、制御要素2〜5のそれぞれと対をなすように設けられ、対応する制御要素の出力から入力を逆算するように構成された複数の逆算部12〜15を具備し、目標値が逆算部12〜15にて順次逆算されてソレノイド駆動デューティduty_solが演算されるように逆算部12〜15を制御要素とは逆順で組み合わせる。
(もっと読む)
サーボ装置
【課題】サーボ装置で駆動される模型飛行機の引込み脚を、停止位置に保持電流を消費せずに維持できるようにする。
【解決手段】サーボ装置10は、出力軸の目標位置信号と、サーボモータ16から得られる出力軸の現在位置信号等との誤差を増幅手段21で増幅し、PWM 波形としてモータに与え、誤差が小さくなる方向にモータを駆動する。不感帯設定手段23は、誤差がフィードバック制御によって修正すべき大きさか否かを判断する基準値を設定する。モータ停止と判断された場合、不感帯は通常の0.4 °から10°に変更される。モータが停止すると外力が加わってもサーボ装置には停止位置で外力に対する保持電流は流れず、電力の無駄な消費が抑えられる。
(もっと読む)
PID調節器を含む閉ループ系のプロセス制御装置
【課題】 PID調節器の比例ゲインが、外乱や目標値変動のような急激な変動に対応して、常に適切な値になるように自動的に算出できる、PID調節器を含む閉ループ系のプロセス制御装置を提供する。
【解決手段】プロセス1と、目標値に従って該プロセスに対する操作量を出力する、比例、積分および微分の3動作からなるPID調節器(10〜14)を含む閉ループ系のプロセス制御装置において、前記プロセスより出力される制御量の時間に対する変化率に基ずいて演算処理される制御ゲイン調整装置の出力でPID調節器の比例ゲインが可変ゲインとして設定できる手段を具備するとともに、前記制御ゲイン調整装置15は、定数発生器で発生させたしきい値α、微分した制御量φ* との間の偏差(α−φ*)を積分器30に入力し、その積分器30の出力をPID調節器の比例ゲインとするように構成した。
(もっと読む)
車両の制御装置および制御方法
【課題】運転者が期待する駆動力をより精度よく反映した駆動力を得る。
【解決手段】ECUは、アクセル開度センサ8010から送信された信号に基づいてアクセル開度を検出するステップ(S100)と、車両から実際に出力される現在の駆動力を算出するステップ(S102)と、車両から実際に出力される現在の駆動力およびアクセル開度に応じて、運転者が期待する駆動力を推定するステップ(S104)と、運転者が期待する駆動力と、車両が実際に出力する現在の駆動力との差が小さくなるように、スロットル開度の目標値を決定するステップ(S106)と、実際のスロットル開度が目標値と一致するように電子スロットルバルブ8016を制御するステップ(S108)とを含む、プログラムを実行する。
(もっと読む)
ステージ制御装置とその重心位置補正方法並びに機械パラメータ調整方法
【課題】 多軸で構成される機械(ステージ)を制御する場合、機械パラメータ(重心位置、質量、慣性モーメント)がずれている軸ならびにそのずれ量を容易に把握することができ、その機械パラメータ(重心位置、質量、慣性モーメント)を補正して機械(ステージ)を正確に制御することができるステージ制御装置とその重心位置補正方法並びに機械パラメータ調整方法を提供する。
【解決手段】 複数軸のうち、ある1軸の重心位置指令から他の1軸の重心位置偏差までのボード線図ゲイン特性を用いて、前記ある1軸の重心位置ずれを調整または補正する手段2,3,15を備えた。
(もっと読む)
モータ制御装置
【課題】 動作が制限される機械系のイナーシャを同定するモータ制御装置を提供する。
【解決手段】 動作に制限条件がある機械を駆動するモータのモータ制御装置であって、速度指令とモ−タ速度によりトルク指令を生成する速度制御部(21)と、前記トルク指令からモータを駆動するモータ駆動部(22)とを備えるモータ制御装置において、イナーシャを同定するイナーシャ同定部(24)と、前記制限条件に基づいて同定指令を生成する同定指令部(25)とを備えた。
(もっと読む)
移動体のサーボ制御装置及びレーザ加工装置
【課題】補償効果に優れる移動体のサーボ制御装置およびレーザ加工装置を提供することおよび付加入力の演算に語長制限がある場合でも十分な補償効果を持たせる。
【解決手段】フィードバック・ループを備え、移動体を位置指令データに基づいて位置決めする移動体のディジタルサーボ制御装置において、位置指令データを受けた時刻におけるフィードバック・ループの状態量に関する伝達関数に対して、フィードバック・ループに固有の極を相殺するような零点を付加するディジタル・フィルタ10a、10b(付加入力手段)を設け、位置指令データに加えてディジタル・フィルタ10a、10bの出力をフィードバック・ループに入力して前記移動体を位置決めする。また、ディジタル・フィルタを縦続型構造とし、この構造を構成する伝達関数が複素平面上で接近した極と零点を持つようにして、演算に語長制限がある場合でも十分な補償効果を得る。
(もっと読む)
モータの負荷イナーシャ推定方法
【課題】 モータのコギングトルクが大きい場合や、負荷の機械系に共振などがあっても、高い精度でモータの負荷のイナーシャを推定する方法を提供する。
【解決手段】 加速度フィードバック信号中の振動を検出する。そしてこの振動が、予め定めたレベル以上あるときには、イナーシャ推定ゲインKnに0以上1未満の係数αを乗算する。またこの振動が予め定めたレベルより小さいときには、イナーシャ推定ゲインKnに1の係数αを乗算する。
(もっと読む)
制御装置
【課題】 位相遅れやむだ時間などが比較的大きい制御対象を制御する場合において、制御対象の入出力間での制御タイミングのずれの解消、および制御精度の向上をいずれも達成することができる制御装置を提供する。
【解決手段】 制御装置1のECU2は、状態予測器22およびDSMコントローラ24を備える。状態予測器22は、予測アルゴリズムに基づき、出力偏差VO2の予測値PREVO2を所定の算出周期ΔTkで算出し、DSMコントローラ24は、ΣΔ変調アルゴリズムに基づき、算出された予測値PREVO2に応じて、目標空燃比KCMDを、予測値PREVO2の算出周期ΔTkよりも短い算出周期ΔTmで算出する。
(もっと読む)
目標温度加工装置およびその階層構造
【課題】汎用の温度調節器であっても、傾斜温度制御を実現できるようにする。
【解決手段】 制御対象1の検出温度を、モード変換器6で傾斜温度および平均温度に変換し、入力される目標傾斜温度および目標平均温度になるように、PID制御部8−1,8−2で操作信号を出力し、この操作信号を、前置補償器9、リミッタ10−1,10−2および補償部11−1,11−2を介して温度調節器2−1,2−2の目標温度として与え、傾斜温度制御を行なっている。
(もっと読む)
モータ制御装置
【課題】機械装置が複数の機械共振を持つ場合でもその複数の機械共振に起因する各発振をそれぞれ抑制でき、かつ、経年変化など何らかの原因で機械装置の共振周波数が変化した場合でもノッチフィルタのノッチ周波数の変更を安定かつ自動的に行うことができるモータ制御装置を得ること。
【解決手段】複数のノッチフィルタ5a,5b,5cを備え、機械共振に起因する発振が生じたときに、ノッチフィルタ選択手段8が、周波数推定手段7が推定した発振周波数ωeと複数のノッチフィルタ5a,5b,5cの有効・無効の設定状態及びノッチ周波数とに基づき、ノッチフィルタ5a,5b,5cの中から適切な1つを選択する。そして、その選択されたノッチフィルタにノッチ周波数設定手段9が発振周波数ωeをノッチ周波数ωnとして設定する。
(もっと読む)
1 - 12 / 12
[ Back to top ]