
Fターム[5H004KB27]の内容
フィードバック制御一般 (10,654) | 制御部 (1,246) | 補償要素を用いるもの (61) | 極零点配置を行うもの (8)
Fターム[5H004KB27]に分類される特許
1 - 8 / 8
外乱オブザーバ、フィードバック補償器、位置決め装置、露光装置、及び外乱オブザーバ設計方法
【課題】設計者が試行錯誤することなく決定した伝達関数に基づく位相進み補償器と位相遅れ補償器により、共振の位相を安定化させることが可能な外乱オブザーバ、フィードバック補償器、位置決め装置、露光装置、及び外乱オブザーバ設計方法を提供する。
【解決手段】
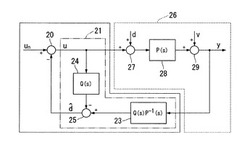
制御対象28に加わる外乱dを推定する外乱オブザーバ21において、外乱オブザーバ21は、制御対象28の共振成分を外乱dの一部として含んだ外乱モデルに基づいて相補感度関数のパラメータが設計されたことを特徴とする。
(もっと読む)
モータ制御装置

【課題】 モデル制御系のパラメータを簡単に調整でき、しかも、モデル速度制御器から出力されるトルク指令が過大になることがなく、より高速で振動のない位置決めを実現できるモータ制御装置を提供する。
【解決手段】 モデル制御系1は、モータについての第1の慣性系の機械モデルと、負荷についての第2の慣性系の機械モデルと、モータと負荷との間のねじりトルクについてのねじりトルクモデルと、フィードバック加速度指令S10をモデルトルク指令部8にフィードバックする第1の状態フィードバック系と、フィードバック速度指令S5をモデル速度指令部5に状態フィードバックする第2の状態フィードバック系とを備えている。モデル制御系の状態方程式から得られる特性方程式が4重根を持つように演算して得たパラメータの関係式に基づいて、モデル制御系のパラメータが定められている。
(もっと読む)
位置制御装置
【課題】速度制御系をマイナーループに、位置制御をメジャーループに持つ位置制御では、高応答にするための調整が困難となっている。
【解決手段】位置制御部にフィードフォワード部を設ける。位置制御部に入力されるステップ状の角度指令θrefと制御対象物の角度検出θdetから比の伝達関数を次式で求める。
θdet/θref={KIω(FFθ+KPθ)}/{Jdys3+(KPω+Ddy)
s2+KIωs+(KIω*KPθ)}
フィードフォワード部のパラメータFFθを、上式の分子多項式の零点=分母多項式の定数項としてKIω(FFθ+KPθ)=KIω*KPθからFFθ=0
として求める。
(ただし、KPθは位置制御部の比例パラメータ、KPω,KIωは速度制御部の比例及び積分パラメータ、Jdyはモータ慣性、Ddyは回転損失s)
(もっと読む)
位置決め制御装置及びレーザ加工機
【課題】
位置決め時間を短くする位置決め制御装置を提供する。
【解決手段】
モータの位置決め制御を行う閉ループ制御系の位置決め制御装置100であって、モータの目標位置が入力される目標位置入力ブロック1と、モータの実位置及び実速度をフィードバックして、目標位置入力ブロック1に入力された目標位置とモータの実位置との偏差に応じた第一の目標指令信号を生成する制御則A(17a)と、モータの実位置及び実速度をフィードバックして、目標位置とモータの実位置との偏差に応じた第二の目標指令信号を生成する制御則B(17b)と、目標位置に応じて、第一の目標指令信号と第二の目標指令信号とのいずれかをモータに入力するように切り替えるスイッチブロック5とを有し、制御則A及び制御則Bは、閉ループ制御系の極配置が互いに異なるように設定されている。
(もっと読む)
移動体のサーボ制御装置及びレーザ加工装置
【課題】補償効果に優れる移動体のサーボ制御装置およびレーザ加工装置を提供することおよび付加入力の演算に語長制限がある場合でも十分な補償効果を持たせる。
【解決手段】フィードバック・ループを備え、移動体を位置指令データに基づいて位置決めする移動体のディジタルサーボ制御装置において、位置指令データを受けた時刻におけるフィードバック・ループの状態量に関する伝達関数に対して、フィードバック・ループに固有の極を相殺するような零点を付加するディジタル・フィルタ10a、10b(付加入力手段)を設け、位置指令データに加えてディジタル・フィルタ10a、10bの出力をフィードバック・ループに入力して前記移動体を位置決めする。また、ディジタル・フィルタを縦続型構造とし、この構造を構成する伝達関数が複素平面上で接近した極と零点を持つようにして、演算に語長制限がある場合でも十分な補償効果を得る。
(もっと読む)
サーボ制御装置及び制御パラメータ決定方法、並びに制御パラメータ決定プログラム
【課題】サーボ制御系に対して明確な制御パラメータを簡便に設定する。
【解決手段】制御系の周波数特性を複素数で表現し、制御パラメータ生成部28で開ループ周波数特性のゼロクロス周波数fxに基づいて複素数の零点を指定する。ディスク回転周波数等から決定された制御器の低域カットオフ周波数asを決定し、目標とするゼロクロス周波数fxを決定する。次に、制御パラメータ生成部28の制御パラメータ算出部41において、制御器の複素数の零点cs、dsを開ループ周波数特性のゼロクロス周波数fxに基づいて決定し、制御器ゲインKpの暫定値を決定する。次に、サーボをかけて開ループ周波数特性を測定し、開ループ周波数特性のゼロクロス周波数が目標とするゼロクロス周波数fxに一致するよう制御器ゲインKpを決定する。続いて、開ループ周波数特性から位相余裕を確認し、位相余裕が42°から32°であれば、このときの制御パラメータを最終的な制御パラメータとして決定する。
(もっと読む)
サーボ制御装置と制御方法
【課題】 少ないメモリ容量と簡単な式で、nサンプリング先の状態量をトルク指令と位置検出値から推定でき、制御性能が向上したサーボ制御装置とサーボ制御方法を提供する。
【解決手段】 位置制御器と、速度制御器と、電流制御器とを有し、指令と制御対象に付加された検出器が出力する検出値から制御対象を指令どおりに動作させるために制御演算を行い電流Iを生成するサーボ制御装置において、nサンプリング先推定器を備え、前記nサンプリング先推定器は、以下の式の演算を行うことを特徴とするサーボ制御装置。 (もっと読む)
(もっと読む)
1次遅れ特性をもつ制御対象の制御方法
【課題】 本発明は、以下の優れた特長を有する、1次遅れ制御対象のための内部モデル制御器を用いた制御方法を提供する。1)フィードバック制御系の安定度を、自在に付与することができる。2)所期の安定度を最もコンパクトな制御器で確保できる。3)所期のループ帯域、速応性を簡単に付与できる。4)動作状態あるいは制御状態が変化する場合にも良好な制御性能を維持できる。
【解決手段】 内部モデル制御器2の分母多項式は複素平面の虚軸上あるいはこの近傍に少なくとも1個の零点を持ち、かつ、内部モデル制御器の分母多項式の最高次パラメータを1とするとき、内部モデル制御器の(次数+1)個のすべての分子多項式パラメータに個別的設計自由度をもたせることにより、課題を解決した。
(もっと読む)
1 - 8 / 8
[ Back to top ]