
Fターム[5H004KC06]の内容
フィードバック制御一般 (10,654) | 制御部 (1,337) | 最適制御、最適化制御 (306) | 評価基準が明確なもの (146) | コスト (32)
Fターム[5H004KC06]に分類される特許
21 - 32 / 32
エネルギー設備運用計画システムおよびエネルギー設備運用計画方法
【課題】 複エネルギー設備において、環境負荷を評価関数または制約条件とし、最適なベストミックス運用計画を算出し、運用することができるエネルギー設備運用計画システムおよびエネルギー設備運用計画方法を提供する。
【解決手段】 複数のエネルギー設備の負荷情報、排出ガス関連情報、エネルギーの市場価格情報、予想変動率情報、需要予測情報のうち、いずれか1つ以上を記憶し、記憶された情報を用いて、複数のエネルギー設備のエネルギー需要に応じた負荷配分の最適なベストミックス計算をベストミックス運用計画最適化計算エンジン部11によって行い、計算された負荷配分に対して、所定の期間の誤差を算出し、誤差修正をリアルタイムベストミックス運用計画最適化計算エンジン部21によって行う。
(もっと読む)
プラント運用適正化装置、プラント運用適正化方法およびプラント運用適正化プログラム

【課題】既存の最適化手法を適用しつつ、状態変数のばらつきに対して安定な最適解を求めることが可能なプラント運用適正化装置を提供する。
【解決手段】評価指数作成手段13cは、最適運転指令に対するフィールド機器の制御性のバラツキとプラント11のモデルの特性の解析結果に基づいて、最適解探索手段13bにて探索される探索点において、プラント11の状態変数のバラツキを考慮した評価指数を作成し、最適解再評価手段13dは、評価指数作成手段13cにて作成された評価指数が加味された再評価関数に基づいて、最適解探索手段13bにて探索された最適解の周辺の運用状態を再評価することにより、最適解探索手段13bにて探索された最適解を選択する。
(もっと読む)
変換器パラメータの最適推定装置および方法
【課題】この発明の目的は、変換器の線形特性のモデルが完全でなくても、線形パラメータおよび非線形パラメータをシステム誤差なしで決定できる変換器パラメータの最適推定装置を提供することにある。
【解決手段】変換器1への入力信号x(t)を受信するために変換器入力端子7に接続された第1の変換入力端子61、変換器1の出力信号y(t)を受信するために変換器出力端子9に接続された第2の変換入力端子57、出力信号y(t)に含まれる線形信号成分ylin(t)の情報は抑制され、かつ出力信号y(t)に含まれる非線形信号成分ynlin(t)の情報は保持されている時間信号を発生する第1の変換出力端子67、69、および線形信号成分ylin(t)の情報を保持する第2の変換出力端子63、65を有する変換システム55を備えている。
(もっと読む)
エネルギバランスの最適化方法
【課題】ガスの供給量及びガスを含む複数種類のエネルギの需要量に変動がある場合でも、ガスホルダの圧力を安定化し、且つ、システム全体のコストが最小となる、現在から将来に渡るエネルギ変換設備の稼動計画をリアルタイムに最適化する。
【解決手段】ガスを含む複数種類のエネルギの配分を最適化するためのエネルギバランスの最適化方法であって、現時点以降、将来に渡る各時刻の各エネルギの需要量を、需要側の消費計画に基いて求め、次いで、全エネルギの統一化されたコストモデルを用いて、現時点以降、将来に渡るガスホルダの圧力を安定化し、且つ、エネルギコストを最小化する各エネルギ変換設備の稼動計画を求める。
(もっと読む)
コジェネレーションシステムの最適化方法および設備提案システム
【課題】システムを構成する機器およびその機器の運転パターンを早期にかつ高精度に抽出することができるコジェネレーションシステムの最適化方法および設備提案システムを提供すること。
【解決手段】本最適化方法では,システムを構成する機器の機器情報およびその機器の時間帯ごとの運転パターン情報を含む設計値テーブルXと,その設計値テーブルXの近傍値テーブルX’が作成される。そして,機器の性能データをデータベースから取得し,その性能データとエネルギー需要量とを基に,設計値テーブルXの評価値Yおよび近傍値テーブルX’の評価値Y’を算出する。そして,評価値Yと評価値Y’とを比較し,評価値Y’よりも評価値Yの方が良好の場合には,両評価値の差分δと温度パラメータとを基に設計値テーブルXを更新するか否かを判断する。その後,温度パラメータの値を小さくする。そして,温度パラメータの値を基に探索を終了するか否かを判断する。
(もっと読む)
同時プロセスシミュレーションを伴う多目的予測プロセス最適化
プロセスを制御するためのシステムと方法には、プロセスのシミュレーションを行いプロセスの模擬出力を生成することと、プロセスからの被測定入力に基づき、且つプロセスシミュレーターからの模擬出力に基づいて、一式の目標値を開発することと、プロセス制御システムの各作動サイクル中に一式の目標値に基づいてプロセスを制御するように構成された複数の制御出力を生成することとが含まれる。模擬出力には、プロセスの定常状態にいたるまでの一つ又は複数の予測将来値が含まれる。  (もっと読む)
(もっと読む)
コジェネレーションシステムの最適化方法および設備提案システム
【課題】システムを構成する機器およびその機器の運転パターンを容易に選択することができ,設備変更に対しても容易に対応することができるコジェネレーションシステムの最適化方法および設備提案システムを提供すること。
【解決手段】本最適化方法では,機器構成の最適化と運転パターンの最適化とを交互に繰り返す。そして,機器構成の最適化の際,機器と運転パターンとを1組の機器情報データとし,その機器情報データを基本単位として遺伝子操作中の交叉を行う。また,運転パターンの最適化の際,,機器構成を固定し,その機器構成での運転パターンについて遺伝子操作を行う。そして,最適化された機器構成および運転パターンでの評価値を判定する。判定条件を満たしていない場合には,判定条件を満たすまで上記処理を繰り返す。
(もっと読む)
プラント最適運用計画作成システム
【課題】プラント負荷の予測誤差を考慮して運用コストが最小の最適運用計画を作成可能とする。
【解決手段】計画案として各制御時間毎の各プラント構成機器の起動・停止状態及び燃料注入量が入力された時に、これら入力情報と各制御時間毎の負荷予測値、各機器の入出力特性・運転モード等を用いて、起動・停止状態や燃料注入量に関する第1運用計画を作成するプラントシミュレータ部20と、第1運用計画に負荷予測誤差を与えて各機器のローカル制御により計画を修正した第2運用計画を第1運用計画と共に出力するローカル制御部30と、 各運用計画の運用コスト及び負荷状態発生確率を用いて運用コスト期待値を計算するコスト計算部40と、運用コスト期待値を目的関数としてこれを最小化する起動・停止状態、燃料注入量を最適化手法により探索し、計画案としてプラントシミュレータ部20に出力する最適化部10とを備える。
(もっと読む)
プラント最適運転支援システムと方法、プログラム
【課題】 予測需要に基づくエネルギー生成設備の最適運転計画を作成するだけでなく、需要のずれによる影響に対する事前の対策立案を支援可能とする。
【解決手段】 需要予測手段21は、需要家情報、気象データ、需要データなどに基づき、需要家のエネルギー需要を予測してエネルギー需要予測値を求める。最適運転計画作成手段22は、エネルギー需要予測値、エネルギー生成設備の特性、設備運用上の制約条件に基づき、運用コストを最小にする運転計画を作成する。運転可能範囲算出手段23は、運転計画の需要変動(需要予測誤差)による影響を評価するための一つの指標として、追加の設備起動および設備停止を行わずに実現可能なエネルギー供給範囲の上限値と下限値を算出する。支援データ作成手段24は、各手段21〜23で得られたデータを理解し易い表示形式で表示するための設備運用支援データを作成し、出力手段13により出力する。
(もっと読む)
最適化された大気汚染制御
多段階制御機(610)は、工程を行うシステム(620)の稼動を指示する。前記工程は、複数の工程パラメータ(MPP)(625)を有するが、MPP(625)の1つ以上が制御可能な工程パラメータ(CTPP)(615)であり、MPP(625)の1つが目標設定工程パラメータ(TPP)(625)である。前記工程は、長さTPLAAV2の定義された時間におけるTPP(625)の実際平均値(AAV)に対する第1の限界を示す定義された目標値(DTV)を有する。前記AAVは、定義された期間におけるTPPの実際数値(AV)に基づいて計算される。第1論理制御器(630)は、少なくとも長さがTPLAAV2であり、現在時点T0から未来時点TAAV2まで延長される第1未来時間(FFTP)においてTPPの未来平均値(FAV)を予測し、このとき、前記TAAV2以前にTPP(625)が定常状態に移動する。FAVは、(i)長さがTPLAAV2以上であり、過去時点T−AAV2から現在時点T0まで延長される第1過去時間(FPTP)における様々な時点でのTPP(625)のAAV、(ii)MPP(625)の現在値、及び(iii)DTVを基にして予測される。第2論理制御器は、TPLAAV2の長さより短くTPLAAV1と等しい長さを有し、現在時点T0から未来時点TAAV1まで延長される第2未来時間(SFTP)の間にTTP(625)のAAVに対する第2の限界を示す追加的目標値(FTV)を確立する。FTVは、FFTPにおいて予測されたTPP(625)のFAVのうちの1つ以上に基づいて確立される。また、第2論理制御器は、(i)TPLAAV1の長さを有し、過去時点T−AAV1から現在時点T0まで延長される第2過去時間(SPTP)における様々な時点でのTPP(625)のAAV、(ii)MMP(625)の現在値、及び(iii)FTVに基づき、CTPP(615)各々に対する目標設定点を決める。第2論理制御機は、前記CTPP(615)に対して決められた目標設定点に従ってCTPP(615)各々の制御を指示する論理をさらに有する。 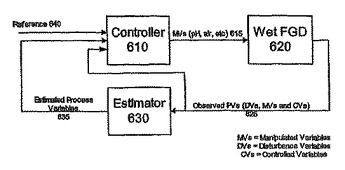 (もっと読む)
(もっと読む)
工程パラメータの平均値の所望値への段階的制御
多段階制御機(610)は、工程を行うシステム(620)の稼動を指示する。前記工程は、複数の工程パラメータ(MPP)(625)を有するが、MPP(625)の1つ以上が制御可能な工程パラメータ(CTPP)(615)であり、MPP(625)の1つが目標設定工程パラメータ(TPP)(625)である。前記工程は、長さTPLAAV2の定義された時間におけるTPP(625)の実際平均値(AAV)に対する第1の限界を示す定義された目標値(DTV)を有する。前記AAVは、定義された期間におけるTPPの実際数値(AV)に基づいて計算される。第1論理制御器(630)は、少なくとも長さがTPLAAV2であり、現在時点T0から未来時点TAAV2まで延長される第1未来時間(FFTP)においてTPPの未来平均値(FAV)を予測し、このとき、前記TAAV2以前にTPP(625)が定常状態に移動する。FAVは、(i)長さがTPLAAV2以上であり、過去時点T−AAV2から現在時点T0まで延長される第1過去時間(FPTP)における様々な時点でのTPP(625)のAAV、(ii)MPP(625)の現在値、及び(iii)DTVを基にして予測される。第2論理制御器は、TPLAAV2の長さより短くTPLAAV1と等しい長さを有し、現在時点T0から未来時点TAAV1まで延長される第2未来時間(SFTP)の間にTTP(625)のAAVに対する第2の限界を示す追加的目標値(FTV)を確立する。FTVは、FFTPにおいて予測されたTPP(625)のFAVのうちの1つ以上に基づいて確立される。また、第2論理制御器は、(i)TPLAAV1の長さを有し、過去時点T−AAV1から現在時点T0まで延長される第2過去時間(SPTP)における様々な時点でのTPP(625)のAAV、(ii)MMP(625)の現在値、及び(iii)FTVに基づき、CTPP(615)各々に対する目標設定点を決める。第2論理制御機は、前記CTPP(615)に対して決められた目標設定点に従ってCTPP(615)各々の制御を指示する論理をさらに有する。 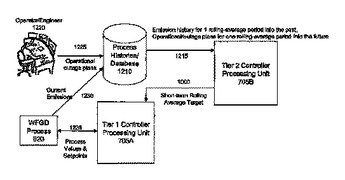 (もっと読む)
(もっと読む)
プラント最適運用計画装置
【課題】
プラント運用費用最小化、ガス排出量最小化、およびメンテナンス費用最小化を総合的に考慮した運用計画を効率的に作成するようなプラント最適運用計画装置を提供する。
【解決手段】
負荷予測手段10、最適化手段20、定常プラントシミュレータ手段30を備え、最適化手段20によりプラント運用費用最小化、ガス排出量最小化、および、メンテナンス費用最小化を考慮して各プラント構成機器の起動・停止状態および燃料注入量を計画し、定常プラントシミュレータ手段30で各プラント構成機器の入出力をシミュレーションにより検証し、これら計画と検証とを交互に繰り返して最終的に最適なプラント運用計画を策定するプラント最適運用計画装置とした。
(もっと読む)
21 - 32 / 32
[ Back to top ]