
Fターム[5H115PI29]の内容
車両の電気的な推進・制動 (204,712) | 車両への電力供給 (26,397) | 車両の駆動源に供給しているもの (9,032)
Fターム[5H115PI29]に分類される特許
9,021 - 9,032 / 9,032
分離された機械的制御と電気的制御を有する動力装置の制御方法及び装置
本発明は、車両の動力装置の制御方法に関する。本発明は、動力装置による車両の特定の駆動モードに存する。エンジントルク抽出モードにおいては、本制御方法は、電気エネルギのバッファ要素の充電レベル(Ucapa)の測定値と、上記電気機械(Me111、Me212)の回転数(ωe1、ωe2)及び電気機械から供給されるトルク(Te1、Te2)の測定値のみを利用して、第1段階において、熱エンジンのトルク(Tice#)を計算し、車輪へ加えられるトルクと熱エンジンの回転数を同時に調整しながら、推定された機械的な特徴を表わす機械的な制御信号(u0)を作成し;次いで、第2段階において、機械的な制御信号に基づいて第1及び第2の電気機械のトルク(Te1#、Te2#)を計算し、エネルギレベルを調整するエネルギ的な制御信号を作成する;ことからなる。 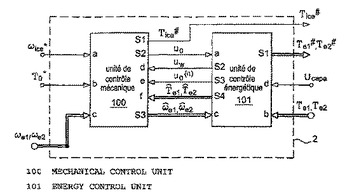 (もっと読む)
(もっと読む)
自動車及びそれに関連する電子制御装置
本発明は、自動車(2)、及び内燃機関(6)と少なくとも1つの電気機械(8)とを制御するための関連する電子制御装置(4)に関する。曲線群及びアルゴリズム群を用いて、電気機械(8)のトルク損失が考慮され、また自動車(2)の駆動伝達系(10)の全体の作動状態とは独立して、トルクが電気機械(8)に加えられる。  (もっと読む)
(もっと読む)
水陸両用車用の推進システム
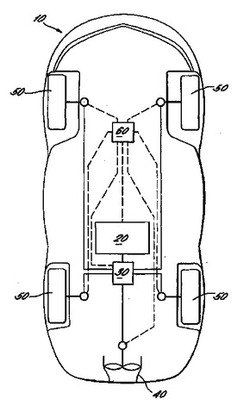
水上を滑走することのできる図1に係る水陸両用車(10)は、原動機(20)と、動力伝達手段(30)と、水上推進手段(40)と、陸上推進手段(50)とを備えた推進システムを有する。車(10)は水上モードまたは陸上モードで作動可能である。陸上および水上で共通制御装置が使用される。操舵制御走行は各モードで同一とすることができる。動力は、水上モード時には水上推進手段に、陸上モード時には水上推進手段と陸上推進手段の両方に伝達される。陸上および水上推進手段の間の動力伝達比率は、陸上モード時に変動することができる。推進制御手段(60)は電子処理手段および/または電気的、機械的、油圧式、もしくは電子機械的作動装置、またはそれらのいずれかの組合せとすることができる。原動機(20)は内燃機関、電気モータ、燃料電池、ハイブリッドエンジン、またはそれらのいずれかの組合せとすることができる。伝達手段は機械的、電気的、または油圧式とすることができる。 (もっと読む)
ハイブリッド自動車

【課題】バッテリの残容量SOCを適切な状態に管理してハイブリッド自動車の走行性能を十分に発揮する。
【解決手段】モータからの動力だけで走行するモータ走行モードと、エンジンからの動力を使用して走行する他の走行モードとを選択する際に用いるモータ走行モード判定用マップにおけるモータ走行モードの範囲をモータに電力供給するバッテリの残容量SOCが適正値となるように更新可能とする。これにより、バッテリの残容量SOCをより適切な状態に維持でき、ハイブリッド自動車の走行性能を十分に発揮することができる。
(もっと読む)
ハイブリッド車両の制御装置
【課題】ハイブリッド車両のエンジンと駆動系との間に設けられるパウダークラッチの耐久性を改善する。
【解決手段】モータ4を備えた駆動系統にエンジン回転を伝達するパウダークラッチ3と、モータ4以降の駆動系統の減速比を無段階に変化させる無段変速機5とを備えたハイブリッド車両において、パウダークラッチを締結しエンジン出力を駆動系に伝達している走行状態からパウダークラッチを開放し回転電機のみによる走行状態へと移行するときには、パウダークラッチの出力側回転数が設定回転数以下の状態でパウダークラッチを開放し、または、エンジンを停止しかつパウダークラッチを開放して回転電機のみによる走行状態にあるときに、パウダークラッチの出力側回転数が設定回転数以上となったときにパウダークラッチを締結する。
(もっと読む)
非接触給電システム
【課題】 受電側の状況を識別して電力供給制御を行うことができて、シンプルな構造を有する非接触給電システムを提供する。
【解決手段】 非接触給電装置1は、高周波インバータ回路11から高周波電力を供給された第1のコイルL1が発生する磁束によって、第2のコイルL2に誘起電圧を発生させ、その誘起電圧を電力変換回路21で所定の形態に変換して負荷30に出力している。そして、信号発生装置24は、高周波インバータ回路11の発振周波数の高調波成分の周波数を有する信号を発生しており、信号受信回路12は、非接触受電装置2の有無を検出した信号、及び信号発生装置24が発生する信号を検出した信号を出力し、インバータ制御回路13はこの検出信号に基づいて高周波インバータ回路11の発振を制御している。
(もっと読む)
誘導性負荷駆動装置
【課題】 逆回復電流をソフトに消滅させ、サージ電圧の発生を抑制することができる誘導性負荷駆動装置を提供する。
【解決手段】 直列に接続したスイッチ素子2を周期的にスイッチングして誘導性負荷1に間欠通電を行う誘導性負荷駆動装置において、前記誘導性負荷1と並列にフリーホイールFET4を配設して前記スイッチ素子2がスイッチオフしたときのフリーホイール電流の流路とし、前記フリーホイールFET4は、前記スイッチ素子2がスイッチオフし、前記フリーホイールFET4のダイオード部に前記フリーホイール電流が流れ始めたときに該フリーホイールFET4をオンさせ、前記スイッチ素子2がスイッチオンしたときに前記フリーホイールFET4を徐々にオフさせることを特徴とする。
(もっと読む)
ハイブリッド車両の駆動制御装置
【課題】 目的地までの経路の道路状況に応じて燃料消費量が最少となるエンジンとモーターの運転スケジュールを設定する。
【解決手段】 発進と停止が予測される地点で目的地までの経路を複数の区間に区分し、目的地までの経路の道路状況と運転者の運転履歴とに基づいて各区間ごとに車速パターンを推定し、車速パターンとエンジンの燃料消費特性とに基づいて、目的地までの燃料消費量が最少となるように各区間ごとのエンジンとモーターの運転スケジュールを設定するようにした。これにより、定常走行時のみならず、車両の減速および制動時のエネルギー回収による燃費改善と、加速時の燃費増加とを考慮して、目的地までの経路の道路状況と運転者の運転履歴に応じた正確な燃料消費量を求めることができ、燃料消費量が最少となるエンジンとモーターの運転スケジュールを設定することができる。
(もっと読む)
移動用電動車両
【課題】 脚に障害を持つ人や脚力の衰えが見える高齢者が使用する移動用電動車両であって、搭乗者が脚を用いて駆動力を発生させる機能を有することによって機能回復訓練に効果を発揮するとともに、チェーンやギヤ等のトルク伝達機構を排除することによってその機構が簡単化されかつ重量が軽減され、そのうえ操縦が容易でかつ乗心地のよい移動用電動車両を提供することを目的とする。
【解決手段】 搭乗者が脚で操作するペダルと、前記ペダルに設けられたペダルの回転角度を検出するセンサと、車両の駆動輪に駆動力を与える駆動手段と、駆動手段を制御する制御手段とを備え、前記制御手段は前記センサの検出信号に基づいて演算した駆動輪の回転角度および回転速度の指令値を前記駆動手段に出力して駆動手段を制御することを特徴としている。
(もっと読む)
駆動装置内蔵車輪式車両
【課題】 浮いたりスリップした車輪に対応する車輪駆動装置の駆動力を、別の車輪に分配できる駆動装置内蔵車輪式車両を提供する。
【解決手段】 車体2側に、左右対の車輪3,4を前後で複数組設け、少なくとも一組の車輪3,4と車体2側との間にそれぞれ車輪駆動装置31を設けた。車体2に車輪駆動装置31の駆動源26,28を配設し、左右対の車輪3,4の車輪軸34間にデファレンシャル装置40A,40Bを介在した。前後で対向したデファレンシャル装置40A,40Bのデファレンシャルケース41の回転取り出し軸48間を、シャフト38を介して連結した。
(もっと読む)
車両用ブレーキ装置
【課題】 電気的作用により任意の制動トルクを発生させる制動装置において、車両を確実に停止させることができると共に、停止保持中に電力を殆ど消費することがない車両用ブレーキ装置を得る。
【解決手段】 電動モータ1による制動の他に摩擦ブレーキ2による制動を行うようにし、ブレーキペダル9が踏まれると、車輪回転速度が予め規定した速度以上では電動モータ1による制動を行い、車輪回転速度が予め規定した速度未満になると、電動モータ1による制動に代わって摩擦ブレーキ2による制動を行う。
(もっと読む)
ハイブリッド車両およびその制御方法
【課題】 パラレルハイブリッド車両において、モータMG2の制御に起因する振動を抑制し、乗り心地を向上する。
【解決手段】 エンジン、モータMG1、モータMG2および車軸をプラネタリギヤを介して結合する。エンジンおよびモータMG1から出力された動力をモータMG2で補償して要求動力を車軸から出力する。この制御では、まず上記補償に必要なトルクをモータMG2の仮目標トルクとして設定する。この仮目標トルクになまし処理を施して目標トルクを決定する。車両の走行状態に応じてなまし処理の程度を変える。停車中にエンジンの始動が開始された場合は、高い応答性でモータMG2を制御して車軸へのトルク変動を適切に相殺する。通常走行中にはやや低い応答性でモータMG2を制御して運転者のアクセル操作に対し滑らかに出力トルクを変える。
(もっと読む)
9,021 - 9,032 / 9,032
[ Back to top ]