
Fターム[5H115QN24]の内容
車両の電気的な推進・制動 (204,712) | 制御、演算 (10,339) | 速度位置偏差等に対する演算要素 (1,337) | 微分要素 (122)
Fターム[5H115QN24]に分類される特許
1 - 20 / 122
作業車両
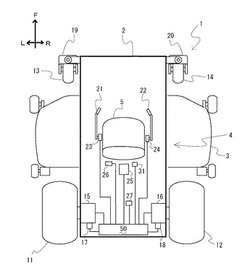
【課題】作業車両の傾斜地での直進走行性能を向上できるようにする。
【解決手段】左右の走行駆動輪11・12と、左右の走行駆動輪11・12の前方または後方に配置される補助輪(キャスタ輪13・14)と、前記左右の走行駆動輪11・12をそれぞれ回転駆動する左右一対の電動モータ15・16と、左右の走行駆動輪11・12の回転速度をそれぞれ検出する回転速度検出手段(回転速度センサ17・18)と、進行方向及び車速を設定する操行手段となる旋回レバー21・22と、作業車両に発生するヨーレイトを検出するヨーレイトセンサ25と、前記操行手段より算出された目標ヨーレイトになるように前記左右電動モータ15・16の回転数を変速してヨー制御する制御装置50を備える作業車両において、操行手段で設定した進行方向が設定角度以内の直進走行の場合のみ、ヨー制御を行うようにした。
(もっと読む)
ハイブリッド車両およびその制御方法

【課題】ハイブリッド車両のバッテリレス走行において、電動機および発電機の駆動に用いられる直流電圧を一定に制御するとともに、車両走行のための要求トルクを確保する。
【解決手段】ハイブリッド車20は、バッテリ50の異常時には、SMR55をオフしてバッテリレス走行を実行する。HVECU70は、バッテリレス走行時には、電力ライン54の電圧VHを電圧指令値に制御するためのMG1およびMG2の出力トルクである電力制御トルクを算出する。さらに、HVECU70は、電力制御トルクを出力する余地を残すように設定されたMG1およびMG2のトルク上下限範囲から、駆動軸32aに発生できる駆動トルクのトルク上下限範囲を定める。そして、HVECU70は、当該トルク上下限範囲内で車両走行のための要求トルクに最も近いトルクが駆動軸32aに発生するように、MG1およびMG2のトルク指令値を設定する。
(もっと読む)
モータ制御システム
【課題】モータ制御システムにおいて、矩形波制御方式からPWM制御方式への切替えを適時に行ってモータ過電流の発生を抑制する。
【解決手段】モータ制御システムは、バッテリ電圧をコンバータ35で必要に応じて昇圧してインバータ38に供給し、交流モータ14の運転条件に応じて、インバータ38の制御方式を矩形波制御、過変調PWM制御、正弦波PWM制御の間で選択的に設定する制御装置を備える。制御装置は、モータ電流の電流位相をdq平面上における閾値ラインと比較して矩形波制御方式からPWM制御方式への切り替えを行う制御方式切替部と、矩形波制御方式の実行中で且つインバータ入力電圧であるシステム電圧VHが所定閾値Vthrよりも小さいときにdq平面上における閾値ラインを進角側または低q軸電流側に変更する閾値変更部とを含む。
(もっと読む)
物品搬送設備
【課題】搬送装置の搬送作動時にサーボ制御される電動モータを停止状態にて制動するときの電力の低減を図ることができながら、必要な搬送能力を維持することができる物品搬送設備を提供すること。
【解決手段】電動モータを制動する制動状態と制動を解除する解除状態に切換自在で、電力供給時に解除状態に、非供給時に制動状態に切り換える制動手段と、高負荷状態か低負荷状態かを判別する負荷状態判別手段とが設けられ、制御手段が、高負荷状態において、電動モータを停止状態に維持するときは、制動手段を解除状態にしかつ駆動制御手段によるサーボロックにて電動モータの回転作動を制動し、低負荷状態において、電動モータを停止状態に維持するときは、駆動制御手段による電動モータのサーボ制御を中断しかつ制動手段を制動状態に切り換えることで電動モータの回転作動を制動する物品搬送設備。
(もっと読む)
制御装置
【課題】走行抵抗トルク、又はブレーキトルクなどの外乱トルクをキャンセルすることなく、車両の動力伝達系に生じる軸ねじれ振動を抑制することができる回転電機の制御装置が求められる。
【解決手段】回転電機の回転速度ωmに基づき、動力伝達系の振動成分を低減するとともに、伝達系入力トルクTinを推定し、回転電機の出力トルクTmを減算して外部入力トルクTwを推定する外部入力推定器41と、外部入力トルクTwと、車両要求トルクTrとに基づいて、低振動回転速度ωm^を算出する低振動速度算出器42と、回転電機の回転速度ωmを低振動回転速度ωm^に一致させるようなフィードバック指令トルクTpを算出する回転速度制御器43と、出力トルク指令値Tmoを算出するトルク指令値算出器44と、を備える回転電機の制御装置。
(もっと読む)
モータ制御システム
【課題】モータ制御システムにおいて、矩形波制御方式からPWM制御方式への切替えを適時に行ってモータ過電流の発生を抑制する。
【解決手段】モータ制御システムは、交流モータ14の運転条件に応じてインバータ38の制御方式を矩形波制御、過変調PWM制御、正弦波PWM制御の間で選択的に設定する制御装置100を備える。制御装置100は、モータ電流の電流位相をdq平面上における閾値ラインと比較して矩形波制御方式からPWM制御方式への切り替えを行う制御方式切替部と、矩形波制御方式の実行中に、矩形波制御部におけるトルク偏差ΔTrの比例積分制御で用いられる積分項GiΔTrの値が所定値ΔTr_thrを超えたときにdq平面上における閾値ラインを進角側または低q軸電流側に変更する閾値変更部S24とを含む。
(もっと読む)
倒立型移動体、その制御方法及び制御プログラム
【課題】安定的に倒立状態を維持できる倒立型移動体、その制御方法及び制御プログラムを提供すること。
【解決手段】倒立型移動体1は、負荷体の傾斜角度である負荷角度を検出する負荷角度手段と、車輪を駆動する駆動手段と、負荷体の倒立状態を維持するように駆動手段の駆動を制御する制御手段と、制御手段が駆動手段に対して出力する制御信号と、負荷角度検出手段により検出された負荷角度とに基づいて、車輪と路面との間の滑り量を時間で微分した微分値を演算する滑り演算手段と、滑り演算手段により演算された微分値に基づいて、所定時間後において、負荷体の倒立状態の維持が不能となる負荷角度の限界値を演算する負荷角度演算手段と、を備えている。制御手段は、負荷角度演算手段により演算された負荷角度の限界値に基づいて、駆動手段の駆動を制御する。
(もっと読む)
車両用動力伝達装置の制御装置
【課題】噛合クラッチ接続時に発生するショックを抑制することができると共に、噛合クラッチにかかる負荷を低減することができる車両用動力伝達装置の制御装置を提供する。
【解決手段】車両走行中のシンクロクラッチ42の接続が、電動機30のトルクTmが略零の状態で実施されるため、クラッチ接続時において前輪車軸26への電動機30のトルク伝達が発生しないに従い、接続時に発生するショックを抑制することができる。また、シンクロクラッチ接続時において電動機30のトルクTmが零であるため、シンクロクラッチ42の前後の回転速度が同期されると、シンクロクラッチ42がスムーズに接続されるに従い、シンクロクラッチ42にかかる負荷が低減され、シンクロクラッチ42の耐久性低下が抑制される。
(もっと読む)
車両用制御装置
【課題】誘導電動機に供給される電圧と電流から誘導電動機の加速度を演算して、車輪の空転を抑えながら加速する場合、低速度域において、空転の誤検知が発生して必要以上にトルクを引き下げるという問題点がある。
【解決手段】検出速度が設定値Aより小さい場合は検出速度を選択し、設定値Bより大きい場合は演算速度を選択し、設定値Aより大きく設定値Bより小さい場合は重み付けして速度を出力する速度選択部を備える。一次角周波数ωが0に近いときは検出速度から加速度を演算し、一次角周波数ωが大きいときは演算速度から加速度を演算することができるため、全速度域で空転検知ができる。
(もっと読む)
車両駆動システム
【課題】車両駆動システムにおいて、車両の走行性能を不必要に制限しないような電流センサ故障検出処理をすることである。
【解決手段】車両駆動システム10は、回転電機12と、インバータ回路14と、直流電源部20と、PWM制御を行う制御回路30と、制御装置50とを含んで構成される。制御装置50は、インバータ回路14の出力電流の時間変化が出力許容範囲を超えるか否かを判断する出力許容判断処理部52と、出力許容範囲を超えるときに、蓄電装置22の電流の時間変化が充放電許容範囲を超えるか否かを判断する充放電許容判断処理部54と、充放電許容範囲を超えるときに、インバータ電流検出手段が異常と判断する電流検出異常判断処理部56とを含んで構成される。
(もっと読む)
ハイブリッド車両の制御装置
【課題】ハイブリッド車両の制御装置において、内燃機関の始動時や停止時にモータ回転数を適正に制御することで容易に回転数制御を実行可能とする。
【解決手段】エンジン11とモータジェネレータ13とトルクコンバータ16と自動変速機17とを駆動連結すると共に、エンジン11の始動時または停止時にロックアップ機構を解放状態または滑り状態とするトルクコンバータ油圧制御部25を設け、ECU31は、ロックアップ機構を解放状態または滑り状態としたときにトルクコンバータ16の入力軸トルクとトルクコンバータ16またはモータジェネレータ13から得られるパラメータとに基づいてモータジェネレータ13の目標モータ回転数を設定し、この目標モータ回転数に基づいてモータジェネレータ13を制御する。
(もっと読む)
ハイブリッド自動車およびその制御方法
【課題】運転者に良好な運転フィーリングを与えるのと電動機の温度上昇の抑制とをより適正に行なう。
【解決手段】Sポジションにより走行する際に、エンジン下限回転数Neminを設定し(S140)、エンジンの要求パワーPe*に基づいて仮回転数Neminと仮トルクTempとを設定し(S150)、仮回転数Netmpがエンジン下限回転数Nemin未満のときにバッテリの残容量SOCが所定残容量Ssetよりも高いときには、エンジン下限回転数Neminで要求パワーPe*を出力する運転ポイントでエンジンを運転し(S200)、仮回転数Netmpがエンジン下限回転数Nemin未満のときにバッテリの残容量SOCが所定残容量Sset以下のときには、基本的にエンジン下限回転数Neminで要求パワーPe*よりも大きなパワーを出力する運転ポイントでエンジンを運転する(S210)。
(もっと読む)
電気車制御装置
【課題】PMSMのγ,δ軸電流の振動や機械的な振動に起因した加速度推定の遅れを低減する。
【解決手段】PMSM4を駆動するインバータ部3の電圧指令値と電流検出値とから回転子の位置誤差を推定する位置誤差推定部31、及び、位置誤差推定値から回転子位置推定値を演算する位相推定部25Aを有し、トルク指令値及び回転子位置推定値に基づいてベクトル制御を実行するセンサレスベクトル制御部2Aと、前記位置誤差推定値に基づいてPMSM4の加速度を推定する加速度推定部32と、この加速度推定部32により生成された加速度推定値に基づいて車輪とレールとの間の空転状態を推定し、前記トルク指令値を調整するための加減速トルクを生成する空転滑走制御部7Aと、を備える。
(もっと読む)
車両
【課題】電磁場の共鳴を利用して、車両外部に設けられた送電コイルから電力を受電可能な受電コイルが底面に配置された車両において、送電コイルに受電コイルを簡単に位置あわせすることができる車両を提供する。
【解決手段】電動車両100は、外部に設けられた送電ユニット220から非接触で電力を受電する車両であって、底面102に配置され、電磁場の共鳴により送電ユニット220から電力を受電可能な受電ユニット110、外部を撮像するカメラ120と、カメラ120が撮像した車両の外部を表示する表示部とを備え、受電ユニット110は、車両の前後方向における底面の中央部から撮像装置が設けられた周面側にずれた位置に配置される。
(もっと読む)
ハイブリッド車両用クラッチ装置
【課題】クラッチ装置の応答時間を低減すること。
【解決手段】ハイブリッド車両10用のクラッチ装置20は、摩擦材21と、プレート22と、係合機構とを備える。摩擦材21は、内燃機関が発生した機関回転力が伝えられる。プレート22は、摩擦材21と接触可能に設けられると共にモータ12が発生したモータ回転力が伝えられ、かつ、伝えられたモータ回転力を車輪へと伝達できる。係合機構は、摩擦材21とプレート22との少なくとも一方に推力を与えて摩擦材21とプレート22とを係合させることができ、かつ、摩擦材21とプレート22との間の隙間の大きさを調節することができる。また、係合機構は、内燃機関の出力を調節するアクセルペダルの開度と、車両の速度とに基づいて、摩擦材21とプレート22との間の隙間の大きさをクラッチ装置20の開放中に調節する。
(もっと読む)
燃料電池システム
【課題】燃料電池の間欠運転時における二次電池の過充電を防止する。
【解決手段】FC要求電圧算出部110は、燃料電池の間欠運転時に、高電位化回避閾値電圧を下回る所定電圧を、FC要求電圧Vrfとして算出し、コンバータへ出力する。FC要求電圧補正部は、燃料電池の間欠運転時に、燃料電池システムとして許容できるシステム許容パワーPsyから燃料電池の発電パワーPfcを引いた偏差Dが値0以下となったときに、偏差Dが値0となるようにコンバータへの指令値を補正する。
(もっと読む)
車両用左右駆動力調整装置の制御装置
【課題】制御の収斂性、応答性を向上させて、車両姿勢の安定性を向上させる車両用左右駆動力調整装置の制御装置を提供する。
【解決手段】左右輪間の実回転数差を検出すると共に、車両の車速及び操舵角に基づいて、目標回転数差を演算し、実回転数差を目標回転数差に追従させる目標トルク差を演算し、運転者の操作状態に基づいて、目標トルク差の最大値を制限する最大差動制限トルクを演算し、目標トルク差の絶対値の上限値を最大差動制限トルクで制限した制限トルク差を演算し、制限トルク差となるように、モータを制御して、差動制限を行う。
(もっと読む)
倒立振子型車両の制御装置
【課題】空転検知可能な移動動作部の構成の限定が少なく、検知可能な空転の限定が少ない空転検知を行なうことが可能な倒立振子型車両の制御装置を提供する。
【解決手段】制御ユニット50は、基体9の傾斜角速度の測定値θbdot_xyz_sに基づいて、車両1の重心速度Vb_xy_exp1を推定すると共に、基体9の傾斜角速度の計測値θbdot_xy_sに基づいて、車両1の重心速度Vb_xy_exp2を推定する。そして、制御ユニット50は、これら推測値の差Vb_xy_difに基づいて、車輪体5の空転発生を検知する。
(もっと読む)
倒立型走行装置および走行装置の制御方法
【課題】同軸二輪車を提供する。
【解決手段】倒立型走行装置は、指令部からの走行速度指令値で倒立走行を行うための目標指令値を生成する調整目標生成部100と、調整目標生成部100にて生成された目標指令値とセンサによる検出結果との偏差に基づいて走行制御を実行するフィードバック補償部43と、センサによる検出結果から求められる実際の走行速度と走行速度指令値との偏差に基づいて調整目標生成部100の制御パラメータを調整する応答性調整部200と、を備える。
(もっと読む)
ハイブリッド車両の制御装置
【課題】無段変速モードへの切り替え過程におけるショックの発生を防止する。
【解決手段】ハイブリッド車両(10)は、第1回転要素(310)が非ロック状態にある場合に対応する無段変速モードと、第1回転要素がロック状態にある場合に対応する固定変速モードとの間で変速モードを切り替え可能に構成される。このようなハイブリッド車両の制御装置(100)は、ロック状態から非ロック状態への切り替え時に、機関トルクが上昇するか否かを判定する判定手段と、機関トルクが上昇すると判定された場合に、機関トルクの反力を受け持つために出力される回転電機(MG1)のトルクの変化量を増加させるように、回転電機を制御する制御手段とを備える。
(もっと読む)
1 - 20 / 122
[ Back to top ]