
Fターム[5H115TO11]の内容
車両の電気的な推進・制動 (204,712) | その他の検出 (15,876) | 電気的変量検出 (4,425)
Fターム[5H115TO11]の下位に属するFターム
Fターム[5H115TO11]に分類される特許
21 - 27 / 27
車両用通信装置
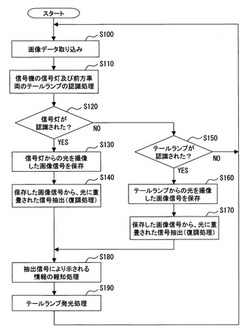
【課題】信号機から車両に情報を送信するとともに、その情報を受け取った車両は後続車両へと情報の伝達を行なう場合に、各車両において適正な情報を受け取ることが可能な車両用通信装置を提供すること。
【解決手段】光の発光源が、信号機10の信号灯15であるか、前方車両のテールランプであるかを認識して識別する。そして、信号機10の信号灯15からの光と前方車両のテールランプからの光をともに受光する状況においては、信号機10の信号灯15からの光に重畳された信号に基づいて、報知部28における報知及びテールランプ27の発光を行なわせるようにする。
(もっと読む)
交流電気車の制御装置

【課題】基準電力変換器から異常な位相の同期電源信号が送出されたとき、その位相が異常であることを検出し、従属電力変換器自身で検出した同期電源信号に切替える。
【解決手段】高調波抑制のために各電力変換器間で搬送波の位相差運転を行う交流電気車の制御装置において、基準電力変換器3から送出される同期電源信号19の位相が異常となったとき、従属電力変換器17において同期電源信号19の位相が異常であることを検出し、従属電力変換器自身で検出した同期電源信号20に切替えることにより従属電力変換器17の運転を継続するようにした。
(もっと読む)
ハイブリッド電気自動車の制御装置
【課題】始動モータの電源カットリレーが故障した場合であってもエンジンを正常に始動することが可能なハイブリッド電気自動車の制御装置を提供する。
【解決手段】駆動力が車両の駆動輪16に伝達可能な電動機6の回転軸とエンジン2の出力軸とが連結可能であって、接点を開くことにより始動スイッチ42を介した電源46から始動モータ38への通電を遮断する電源カットリレー44を備え、始動スイッチ42が始動位置に操作されたとき、電源カットリレー44の接点を開いて電動機6によりエンジン2を始動し、もしくは電動機6によるエンジン2の始動を行わずに電源カットリレー44の接点を閉じて始動モータ38によりエンジン2を始動し、始動スイッチ42が始動位置に操作されたとき、電源カットリレー44の所定の故障を検出した場合には、電動機6によるエンジン2の始動を行わずに始動モータ38によりエンジン2を始動する。
(もっと読む)
車両の制駆動力制御装置
【課題】サスペンションの効果が十分に得られないインホイールモータ型の車両であっても、車両が路面の段差等を通過する時に車両のピッチレートを低減すること。
【解決手段】車両10のピッチレートを検出する上下加速度センサ21a,21b,21c,21dと、前輪Wfl,Wfrと後輪Wrl,Wrrにそれぞれ異なる制駆動力を付与することにより、車両の重心周りに生じるピッチモーメントを低減するコントローラ22とを備えた。ピッチレートの変動が検出された場合には、コントローラ22は、前輪Wfl,Wfrまたは後輪Wrl,Wrrのうちの一方の車輪の駆動力を低減させるとともに、当該低減させた駆動力を他方の車輪に付与するようにした。
(もっと読む)
高周波ジェネレータを使用して乗物を動かすシステム及び方法
高周波(RF)信号を使用して乗物を動かすためのシステム及び方法を説明する。例えば、本発明の一実施形態に基づく方法は、車道上を走行する乗物の方向にRF信号を送信するように構成された複数のRFジェネレータを車道の路面下に配置するステップと、そのRFジェネレータから送信されたRF信号を受信し、このRF信号から電力を発生するように構成されたレクテナを乗物に結合するステップと、レクテナにより発生された電力を使用して乗物を動かすステップと、を備えている。 (もっと読む)
ハイブリッド車およびその制御方法
【課題】電動機が上限回転数を超えて駆動されるのを抑止する。
【解決手段】遊星歯車機構を介してエンジンと第1モータと駆動軸とが接続されると共に駆動軸に第2モータが接続されたハイブリッド車において、燃料タンクに取り付けられた残量計からの燃料残量Fuが所定残量Fref未満となってからの走行距離Lが所定距離Lrefを超えたとき(S130〜S180)、所定トルクTrefを上限としてエンジン22から出力するトルクを制限すると共に(S190,S200)、要求トルクTr*が駆動軸に出力されるようエンジンと二つのモータを制御する。これにより、燃料切れ直前に一時的に遮断された燃料供給が回復したときにエンジントルクが急増するのを抑制でき、第1モータが上限回転数を超えて駆動されるのを抑止できる。
(もっと読む)
電気車制御装置
【課題】主電動機駆動インバータの1パルスモードにおいて、車輪・レール間の接線力対応トルク推定遅れのため、粘着力の有効利用が図れなくなることがある。
【解決手段】インバータ1パルスモード中の空転・滑走検知時に、接線力対応トルクの推定値から演算したトルク指令値の最小値を所定期間指令し終わった時点で、動輪がまだ再粘着途中あるいは再粘着に向かうことがなかった場合に、それまでのトルク指令値よりさらに小さいトルクを指令して再粘着させ、空転・滑走検知時点で演算したトルク指令予定値を少し小さな値に修正したトルクをその後指令し、この修正トルクを指令している期間中の平均加速度・減速度から、それ以降の車両速度を演算し、この推定車両速度と動輪速度との差速度がある閾値以上になったときに空転・滑走を検知するようにして、空転・滑走速度が大きくならないようにしつつ、確実に再粘着させることができるようにする。
(もっと読む)
21 - 27 / 27
[ Back to top ]