
Fターム[5H209GG14]の内容
Fターム[5H209GG14]に分類される特許
1 - 10 / 10
フィールド機器
【課題】不安定な状態で動作することによる不具合の発生を防止する。
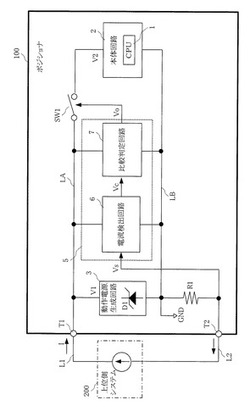
【解決手段】動作電源生成回路3からの本体回路2への動作電源V2の供給ラインLAに切替スイッチSW1を設ける。切替スイッチSW1のオン/オフの状態(閉状態/開状態)を制御する制御回路部5として電流検出回路6と比較判定回路7とを設ける。電流検出回路6は、上位側システム200からの供給電流Iの値に応じた電圧Vsを入力とし、この電圧Vsを反転増幅して出力電圧Vcとする。比較判定回路7は、電流検出回路6からの出力電圧Vcを入力とし、この出力電圧Vcと基準電圧Vdとを比較し、出力電圧Vcが基準電圧Vdよりも高くなった場合に、切替スイッチSW1をオンとする。基準電圧Vdは本体回路2を正常に動作させるために必要な供給電流Iの下限電流値に応ずる値として予め定められている。
(もっと読む)
電子機器

【課題】本発明は、複数の電力供給源(電源)が同時に接続された場合であっても、電子機器の故障を防ぐことが可能な電源排他回路を備える電子機器を提供することを目的とする。
【解決手段】本発明に係る電子機器1は、第1及び第2の電力制御部26、25を有する電源排他回路2を備えている。第1の電力制御部26は、PSE電源50aから電子回路部3へ電力が供給されている場合に、電力検出部23が外部電源7から供給される電力を検出したとき、PSE電源50aから電子回路部3へ供給される電力を停止するように制御するとともに、外部電源7から電子回路部3への電力供給を許容する許容信号の切替を行い、第2の電力制御部25は、許容信号の切替が行われたとき、外部電源7から電子回路部3に電力を供給するように制御するとともに、許容信号の切替が行われていないとき、外部電源7から電子回路部3への電力供給経路21を遮断する。
(もっと読む)
サーボシステムおよび安全制御機器
【課題】サーボシステム全体を、安全機能を有するサーボシステムに入れ替えることなく、サーボシステムの安全化を図る。
【解決手段】サーボモータ2と、サーボモータ2に取り付けられたエンコーダ3の出力に基づいて、サーボモータ2の駆動を制御するサーボアンプ4とを備えるサーボシステムにおいて、エンコーダ3の出力に基づいて、異常の有無を監視し、異常が有るときには、サーボモータ2への駆動電力の供給を遮断する安全制御機器6を設けており、監視する内容を設定情報として設定できるようにしている。
(もっと読む)
コントローラ装置
【課題】 コントローラ装置の内部温度を取得するための温度検出素子に異常を来たした場合は内部温度を正常に取得できないので、安全のため、装置の運転を停止しなければならず不便である。
【解決手段】 複数の温度検出素子を備えたうえで、いずれかの温度検出素子が異常を来たした場合であってもそれを温度検出素子異常判断部によって検知し、正常な温度検出素子の出力に基づいてコントローラ装置の内部温度を測定することが可能となるので、従来のコントローラ装置に比して安全かつ利便性の高いコントローラ装置を提供することが可能となる。
(もっと読む)
電子制御装置
【課題】イグニションスイッチ(IGSW)がオフされると実行されるべき処理(後処理)が完了したならば、外部電源からの電圧供給を遮断する機能を備えた電子制御装置において、後処理の増減を容易にする。
【解決手段】CPU12aは、「後処理の種類の数だけ予めカウンタをアップカウントし、後処理が完了する毎のそのカウンタをダウンカウントする」カウンタ機能21を有しており、IGSW5がオフされている場合に、カウンタのカウント値がアップカウント前の初期値になると、メインリレー3をオフする。つまり、このカウンタ機能21によれば、CPU12aは、メインリレー3をオフするか否かの判断に際し、後処理が完了したか否かを個別に判断しなくても良くなり、このため、後処理が完了したか否かを判断するための構成を、後処理の増減に伴って追加したり削除したりする必要がなくなる。
(もっと読む)
サーボモータ監視装置
【課題】サーボモータの動作について適正に異常検知を行う。
【解決手段】 サーボモータ1に接続されたモータ駆動線U,V,Wからサーボモータの磁極位置信号を取り出す磁極位置算定手段20と、サーボモータの位置検出手段からの現在位置信号を入力する現在位置信号入力手段30と、サーボモータの磁極位置信号と現在位置信号の二系統の信号に基づくサーボモータの動作を比較し、不一致が検出された場合に、サーボモータへの電源供給を遮断する停止指令信号を出力する監視手段40とを有している。
(もっと読む)
ロボット制御装置
【課題】サーボ制御部の異常を迅速かつ的確に検出すること。
【解決手段】監視部7は、二つの演算処理部10,11を有し、各演算処理部は、制御情報からロボットの位置を推測する位置推測手段10,11と、他の演算処理部における推測されたロボットの推測位置を取得する推測位置取得手段10,11と、推測したロボットの推測位置と取得したロボットの推測位置とが一致するか否かを判断する推測位置一致判断手段10,11と、ロボットの推測位置が一致すると判断された場合に、推測位置と検出されたロボットの現在位置との差を算出する位置差算出手段10,11と、算出された位置の差が所定値以上である場合又はロボットの推測位置が一致しないと判断された場合に、切り替え部5,6によりサーボモータに対する電力の供給を遮断する電力遮断手段10,11と、を備える。
(もっと読む)
緊急遮断システム
緊急遮断システムは、緊急遮断弁と、緊急遮断弁の位置決めを決定する信号を搬送する制御回線と、緊急遮断弁の位置決めを実現する制御回線に結合されたソレノイド組立体と、制御回線およびソレノイド組立体に結合されたに中継器とを備えている。実施形態によっては、中継器が、ソレノイド組立体を制御回線に結合する、すなわち励磁するか否かを制御するために上記の信号に応答する継電器の如きスイッチを備えている。 (もっと読む)
燃焼制御装置及び燃焼装置
【課題】 給湯器等に内蔵される燃焼制御装置に関するものであり、従来のものに比べて安全性が高く、且つ副コンピュータの要求性能として過度に高いものを必要としない燃焼制御装置の提供を課題とする。
【解決手段】 副マイクロコンピュータのROMに異常が無いかを確認する。ステップ3で主マイクロコンピュータから副マイクロコンピュータにチェックサムの演算を行う旨の指令を送信し、これを受けて副マイクロコンピュータでは、ROMのチェックサムを演算する。ステップ5で演算結果のデータが副マイクロコンピュータから主マイクロコンピュータに送信される。これと平行して不揮発性記憶素子に予め記憶された副側正常データを読み出し、ステップ8で副マイクロコンピュータから主マイクロコンピュータに送信された演算結果と、不揮発性記憶素子から読み出した副側正常データとを比較する。
(もっと読む)
操作権限管理方法及びそのシステム
【課題】 操作器毎に操作許可者が異なる場合であっても、的確な操作権限管理を行う。
【解決手段】 操作器(操作ボタンや操作スイッチなど)101に対応させて該操作器の識別情報を送信可能な操作器RFID103を設けるとともに、操作者001の識別情報を送信可能な操作者RFID106を操作者に着用させ、操作器が操作されたときに、操作器RFID103及び操作者RFID106に操作器情報202と操作者情報204を送信させ、これらを受信して操作器が操作権限を有する操作者により操作されたか否かを判定し(109)、操作権限を有する操作者である場合に、操作対象機器110のポンプや弁などへの操作信号を有効にする。
(もっと読む)
1 - 10 / 10
[ Back to top ]