
Fターム[5H301FF25]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体の位置認識用固定設備 (875) | 設備自体の構成の限定 (99)
Fターム[5H301FF25]の下位に属するFターム
構成材料の限定 (17)
製造方法、設置方法の限定 (74)
Fターム[5H301FF25]に分類される特許
1 - 8 / 8
自律移動ロボットの動作計画方法、自律移動ロボットの動作計画方法を利用した自律移動ロボットの制御方法、自律移動ロボットの動作計画装置、自律移動ロボットの動作制御装置、自律移動ロボットの動作計画プログラム、自律移動ロボットの制御プログラム
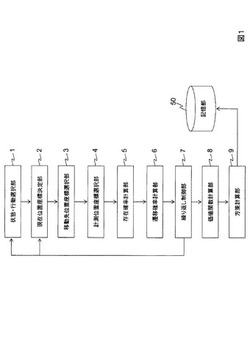
【課題】流速および流れの向きが不確定な環境中において、自律移動ロボットが目標位置に十分な精度で到達することを可能ならしめる動作計画を行う。
【解決手段】部分観測マルコフ決定過程(POMDP)のうち、行動主体の状態についての確率分布が状態のエントロピーにて表現可能であるという仮定に基づくAugmented MDPにおける動的計画法を応用する。本発明では、自律移動ロボットの状態が、デカルト座標、方位角、当該デカルト座標の確率分布についてのエントロピー、当該方位角の確率分布についてのエントロピーを含んで表現されており、デカルト座標と方位角からなる位置座標を確率的に計算する。
(もっと読む)
移動体位置検出システムおよび方法

【課題】撮像した画像が照合用のデータベースにない場合でも位置検出を円滑に継続できる移動体位置検出システムおよび方法を提供する。
【解決手段】平面12上を移動する移動体16の位置を検出する移動体位置検出システム10であって、平面12上に配置された複数のドットからなるドットパターン14と、移動体16に備えられ、移動体16が位置する平面12上の領域を撮像する撮像手段20と、撮像手段20が時間的に連続して取得した2画像中に共通して含まれるドットパターンの位置関係に基づいて、2画像間の位置および方向関係を求め、移動体16の現在位置および方向を推定する推定手段28と、を備えるようにする。
(もっと読む)
移動体システム
【課題】 移動体の位置を連続的に監視しながら、移動体を駆動するリニアモータの1次側を連続的に制御する。
【構成】 リニアモータの2次側部材を備えた複数の移動体と、移動体の移動経路に沿って2次側部材の長さ以下のピッチで複数設けられたリニアモータの1次側部材とを設ける。移動体の位置を検出するセンサを2次側部材の長さ以下のピッチで設けると共に、センサからの位置信号により1次側部材を制御するコントローラを設ける。
(もっと読む)
ロボット制御システム及びロボット制御プログラム
【課題】物体の搬送作業を行えるロボットを好適に制御できるロボット制御システムを、提供する。
【解決手段】カメラ画像が表示されているタッチスクリーン上の或る範囲を指定する操作が行われた場合、カメラ画像に対する画像セグメンテーション処理結果を利用して、カメラ画像中の、ユーザが指定した範囲内に所定割合以上の部分が含まれているセグメント群からなる画像を探索し、探索した画像を、搬送対象物の画像として特定(S102)し、特定した画像に基づき搬送対象物をロボットに搬送させる制御処理(S110)を行う。
(もっと読む)
無線タグシートおよび移動台車システム
【課題】 自律走行する無人搬送車の経路を絶対位置情報やマップデータを使用せずに補正できるようにする。
【解決手段】 目標点までの距離と方向の情報を記憶した複数の無線タグを並べた無線タグ群12を、前記目標点と前記無線タグ郡の中央とが指示経路上になるように指示経路に対して対称となるように法線方向に予め走行面に施設し、無人搬送車が前記無線タグ群12を通過する際に前記無線タグ群12の無線タグから記憶されている情報を読み取り、計算装置で前記情報に基づいて走行経路を補正しながら駆動装置に指令する。
(もっと読む)
移動体システム
【課題】距離センサを用いて移動体を精度良く自律走行させるとともにより省スペース化できるようにした、移動体システムを提供する。
【解決手段】移動体1に取り付けられ、所定の探索範囲に検出用光を走査して移動体と探索範囲内に存在する物体までの距離及び方向を検出する距離方向検出装置7と、平板標識20の設置される位置を含む走行経路の地図情報を記憶する地図情報記憶手段と、距離方向検出装置の検出結果と地図情報記憶手段に記憶された地図情報とを照合して移動体の進行方向を決定する進行方向決定手段と、を有する移動体システムであって平板標識20に検出用光を拡散反射させる拡散反射面と検出用光を鏡面反射させる鏡面加工面とを設けて構成する。
(もっと読む)
移動体位置検出システム
【課題】平面上に描いたパターンを利用して移動体の位置の検出を行う。
【解決手段】本発明の移動体位置検出システムは、表面に同一のドットパターンが配置された複数のパネルを並設することにより構成される平面と、複数のパネルのドットパターンを構成する個々のドットの基準特徴量を算出し、この基準特徴量を個々のドットの平面上における座標値と対応付けてデータベースに格納する基準特徴量格納手段と、移動体が位置する平面上の領域を予め決められた時間間隔で撮像する撮像手段と、撮像手段が取得した画像中の複数のドットから所定のドットを選択し、選択したドットの検出特徴量を算出する検出特徴量算出手段と、検出特徴量をデータベース中の所定の大きさの照合範囲の基準特徴量と照合することにより、最も一致度の高い基準特徴量を選択し、選択した基準特徴量の座標値を、平面上における移動体の現在位置として検出する特徴量照合手段とを備える。
(もっと読む)
3次元モデルを用いた自己位置認識手法及び自己位置認識システム
【課題】移動空間内のレイアウトを変更しても容易に適用でき、導入コストが小さく、さらに、高速且つ正確に自己位置認識する。
【解決手段】移動空間の3次元モデルを作成する手段21と、所定時間における移動体の位置及び方向からカメラ画像を取得する手段10と、所定時間における目標軌道上の目標位置及び方向を算出する手段17と、3次元モデルから目標位置及び方向の所定範囲内における複数の位置及び方向のモデル画像を形成する手段15と、この複数のモデル画像とカメラ画像との色情報の一致度を算出する手段16と、この各一致度に基づいて、移動体の位置及び方向を認識する手段18とを備えた。
(もっと読む)
1 - 8 / 8
[ Back to top ]