
Fターム[5H301HH15]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体の操舵態様 (687) | 曲線走行時の操舵 (39)
Fターム[5H301HH15]の下位に属するFターム
加減速制御を伴うもの (7)
Fターム[5H301HH15]に分類される特許
21 - 32 / 32
車両走行制御装置

【課題】周囲の走行環境に適応して安全な車両走行が行える車両走行制御装置を提供すること。
【解決手段】車両状態と外部環境に基づいて自車の目標速度パターンをECU10にて随時生成し、他車と隊列して走行する際に自車の目標速度パターン及び他車の目標速度パターンに基づいて隊列走行速度パターンを随時生成し、その隊列走行速度パターンに応じて
スロットルアクチュエータ32などを作動させて車両の走行制御を行う。これにより、隊列内における先行車両の走行制御誤差の重畳によって後方側の車両の走行制御誤差が大きくなることを防止できる。
(もっと読む)
自律マシン

【課題】改良された自律マシンを提供する。
【解決手段】自律マシンはそれが配置される領域を探査し、前記マシンが前記領域を探査する際に前記マシンによって収集された情報に基づいて前記領域のマップを構築する。前記マシンは自身が前記領域内の前に訪れたポジションに戻ってきたかどうかを特定する。前記マップは、前記マシンが前に訪れたポジションに戻る際、現在のポジションと前に訪れたポジションとが同一であるという知識に基づいて修正される。
(もっと読む)
四輪操舵式無人搬送車の操舵制御方法
【課題】曲線外側への車体の膨らみを最小限としながら曲線内側へのはみ出しも抑えて曲率の大きな曲線を円滑に走行することができる四輪操舵式無人搬送車の操舵制御方法を提供する。
【解決手段】四輪操舵式無人搬送車が曲線を走行する際の制御方法であって、曲線進入前の直線走行状態(地点A)から、曲線入口部での前輪操舵段階(地点A〜B)と、曲線部での前後逆位相操舵段階(地点B〜C)とを行って曲線を走行するように制御する。さらに、曲線出口部で後輪操舵段階(地点C〜D)を行い、曲線を出たとき(地点E)には直線走行状態に復帰させる制御を行う。
(もっと読む)
自律移動車両
【課題】全方向移動可能な自律移動車両において、急な減速停止などをすることなく衝突回避をより確実にすると共に、より滑らかな自律的移動を可能とする。
【解決手段】記憶した地図情報に基づいて自律的に移動する自律移動車両であって、略全方向に走行移動可能とする走行手段2と、移動に際して障害となる障害物を検出する障害物検知センサ3と、地図情報を記憶すると共にその地図情報に基づいて、センサ3によって検知された障害物との衝突を回避しつつ、走行手段2を制御する走行制御手段4と、を備える。走行制御手段4は、車両の左右方向の動きを略ゼロに制限した上で前後方向および回転の2自由度の運動を行うように前記回転運動の中心を制御中心として走行手段2を制御し、障害物を回避するために移動方向を変更する際に、衝突可能性が高い障害物位置または該障害物位置に近い車両を含む車両周辺に前記制御中心を設定する。
(もっと読む)
内輪差監視システム
【課題】内輪差に基づく車両の走行軌跡をシミュレーションすることにより、内輪差によるコーナや道路分岐点にある障害物や路肩との接触事故を未然に回避する。
【解決手段】内輪差監視システムは、車両の右左折時、車両の回転中心側の前輪と後輪が描く円弧の半径の差によって生じる内輪差に関するデータを算出する内輪差算出部15と、内輪差算出部により算出された内輪差に関するデータに基づき、後輪の通過地点と路肩との位置関係をシミュレーションする走行軌跡シミュレーション制御部17で構成される。
(もっと読む)
移動体及びその制御方法
【課題】
移動をスムーズに行なうことができる移動体、及びその制御方法を提供する。
【解決手段】
本発明にかかる移動体の制御方法は、目標経路に対して追従する移動体の移動をフィードバック制御する制御方法であって、移動体の位置姿勢を推定するステップ(ステップS102)と、推定された推定位置姿勢と前記目標経路とに基づいて、旋回速度を決定するステップ(ステップS103)と、移動体の運動エネルギーが一定となるよう、決定された旋回速度から移動体の直進速度を決定するステップ(ステップS104)と、決定された旋回速度と、決定された直進速度とに基づいて、移動体の駆動機構を制御するステップと、を備えるものである。
(もっと読む)
経路作成方法、移動体および移動体制御システム
【課題】
平面上や空間内において位置および順序が特定された複数の座標点により得られる離散経路の形状をある程度保つような連続経路を作成するための経路作成方法を提供すること。
【解決手段】
2次元以上の多次元空間内において、N個の座標点からなる座標点集合を一定の順序でつなぎ合わせて生成される離散経路から、滑らかな連続経路を作成する経路作成方法において、連続経路を媒介変数t(ただし、tはt:0≦t≦N−1を満たす任意の実数で、前記離散経路の節点に相当する値)を用いて表現した場合に、前記連続経路上の任意の点として表される点Atの座標値を、前記座標点集合に含まれる、tに最も近い整数番目の座標点(以下、対応座標点という)の座標値が、前記点Atの座標値に最も大きく影響を与えるように、前記対応座標点を含む連続した複数の座標点の座標値に基づいて算出する。
(もっと読む)
移動体の軌道追従制御システム及び軌道追従制御方法
【課題】
目標経路に対する追従性が高い軌道追従制御システム及び軌道追従制御方法を提供すること。
【解決手段】
本発明にかかる軌道追従制御システムは、目標経路100に対してロボット1が追従するように制御するものである。このシステムでは、まず、目標経路100を円弧近似し、円弧の曲率を算出する。このとき、本発明では、ロボット1の移動速度に応じて曲率を決定している。次に、算出された曲率に応じてロボット1の制御を決定する。
(もっと読む)
走行装置
【目的】 本発明の目的は路面の状況に左右されることなく安定した走行を行うことができる走行装置を提供する。
【構成】 車台100と、車台100の四隅に回転可能に設けられた車輪ユニット200と、車輪ユニット200の浮き上がり又は滑り(異常)を検出する検出手段300と、車輪ユニット200の向きを変化させる駆動部410と、走行指令値に基いて車輪ユニット200の駆動部220L、220Rを独立制御する制御部500とを備え、制御部500は、検出手段300を通じて車輪ユニット200に異常が発生したと判断すると、駆動部410の回転エンコーダ411を通じて検出した車輪ユニット200の向きと走行指令値に含まれる方向指令とが一致するか否かを判断し、一致しないと判断したときには、車輪ユニット200の向きと方向指令と一致するまで、駆動部410のステッピングモータ412を駆動させる。
(もっと読む)
搬送車
【課題】複数の駆動輪を有し、曲率の異なる部分を有する軌道に案内されて所定の走行経路を走行する搬送車において、各駆動輪が位置する軌道の曲率が異なることに起因する、駆動輪のスリップや搬送車の車体へ無理な負荷がかかることを防止する。
【解決手段】各駆動輪4・5をそれぞれ制御する個別のドライバ(インバータ34・35)と、各駆動輪4・5のいずれもが軌道における同じ曲率の部分に位置する場合には前記各ドライバに同じ指令値を与え、各駆動輪4・5が軌道における異なる曲率の部分に位置する場合には前記各ドライバに曲率に応じた指令値を与える制御手段と、を備える構成とした。
(もっと読む)
ピッチ変調による車両制御
下地表面上の特定方向への運動に対する車両の前後安定化のための方法。車両は、少なくとも1つの前輪と少なくとも1つの後輪とを有し、前輪は車両の運動の瞬間的な方向に垂直である力により特徴付けられる。モーター作動器は、各々の後輪を駆動し、コントローラは、一律の制御規則に従い、該前輪が該下地表面と接触していても、そうでなくても、該車両を動的に安定化させるように、1つ以上のモーター作動器を支配する。トルクは、車両ピッチまたは運動方向に垂直な前輪にかかる力を基礎として、後輪に適用される。さらに、周期的な回転変調は、後輪に適用され得、車両ピッチまたは前輪にかかる垂直な力のどちらかについて検出された応答に基づいて安定しているトルクが提供される。左右のモーター作動器は、別個に左後輪および右後輪を制御し得、前輪がグランドに接触していても、そうでなくても、ユーザーの操縦により支配される通りにターンを続ける。 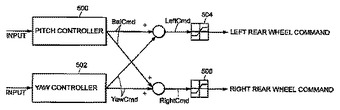 (もっと読む)
(もっと読む)
搬送台車システム
【構成】 カーブ区間で、走行レールの中心線44と同心に櫛歯マーク28を設け、天井走行車の櫛歯センサで櫛歯を読み取り、中心線44の曲率半径Rと櫛歯マークの曲率半径rの比で補正し、歯と歯の間をエンコーダで補間して、カーブ区間での位置を求める。
【効果】 カーブ区間でも天井走行車の正確な位置を認識でき、カーブ区間にロードポートを設けることができる。
(もっと読む)
21 - 32 / 32
[ Back to top ]