
Fターム[5H301HH16]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体の操舵態様 (687) | 曲線走行時の操舵 (39) | 加減速制御を伴うもの (7)
Fターム[5H301HH16]に分類される特許
1 - 7 / 7
無人搬送システム
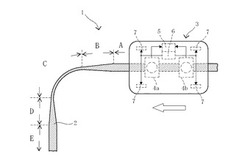
【課題】マーカーを設けることなく無人搬送車の走行速度を制御することができる無人搬送システムを提供する。
【解決手段】路面に敷設された誘導ライン2と、該誘導ライン2に沿って所定の走行速度で走行する無人搬送車3とを備えた無人搬送システム1であって、誘導ライン2は、区間によって異なるライン幅を有し、無人搬送車3は、誘導ライン2を含む領域の画像データを生成する撮像手段4a、4bと、生成された画像データにおけるライン幅に基づいて目標速度を設定する目標速度設定部5と、目標速度に一致するように走行速度をフィードバック制御する走行制御部6と、を有することを特徴とする。
(もっと読む)
搬送車システム

【課題】左右の車輪を独立して駆動可能な搬送車において、曲線部走行時にモータの過負荷を防止する。
【解決手段】搬送車システムにおいて、速度パターン発生部62は、搬送車が曲線部を走行するときに2個の走行車輪に対して基準速度に対して内外輪にそれぞれ速度差が生じるように、速度指令を発生して2個のモータ26,29に与える。速度パターン発生部62は、搬送車が加速中に曲線部に進入することを光電センサ47が検出すれば、第1速度比率変化区間において、外輪となる走行車輪に対応するモータに対して進入時の加速度a01以下の加速度となるような速度指令を生成して与え、内輪となる走行車輪に対応するモータに対して外輪となる走行車輪の速度より速度差分以上を減らした速度となるような速度指令を生成して与える。
(もっと読む)
無人搬送車の走行制御装置
【課題】旋回制御に用いるソフトウェアのプログラムの作成を容易に行うことができるとともに、無人搬送車の旋回走行動作を円滑に行うことができる無人搬送車の走行制御装置を提供する。
【解決手段】メイン誘導テープ12に沿って無人搬送車を直線走行動作する際には、誘導センサ23の中心位置O2が誘導テープ12の中心位置O1に一致するように無人搬送車の一対の駆動輪の回転速度を制御する。無人搬送車が分岐誘導テープ13に沿って右方向へ旋回動作される場合には、誘導センサ23の中心位置O2を前記分岐誘導テープ13の旋回方向の内側の端縁13aに一致するように無人搬送車の旋回動作を制御する。
(もっと読む)
無人搬送車の走行制御方法
【課題】小さい半径の曲線部も安定して走行することが可能な無人搬送車を提供する。
【解決手段】走行台車と、走行台車を前後左右走行自在に走行路面上に支持するキャスタ輪と、走行台車の前後に設置されそれぞれ独立に操舵・駆動される駆動輪と、走行路面上のガイドテープを検出する走行台車の前後に設置されたガイドセンサとを有する無人搬送車の走行制御方法において、駆動輪が前輪・後輪速度制御され、後輪の操舵角の目標値が前輪の操舵角の目標値を超えた場合、前輪の速度を減速制御とするとともに後輪の速度を設定速度とし、前輪の操舵角の目標値が後輪の操舵角の目標値以上である場合、前輪の速度を設定速度とするとともに後輪の速度を減速制御することによって前記の課題を解決する。
(もっと読む)
無人搬送車
【課題】小さい半径の曲線部も安定して走行することが可能な無人搬送車を提供する。
【解決手段】円柱状ワークを搭載する走行台車と、走行台車を前後左右走行自在に走行路面上に支持するキャスタ輪と、走行台車に推進力を与える駆動輪と、走行台車の向きを変える操舵機構と、走行路面上のガイドテープを検出するガイドセンサと、駆動輪の操舵角度を検出する内界センサとを有する無人搬送車において、ガイドセンサの出力に基づき算出される操舵角度の目標値と内界センサの出力に基づき算出される操舵角度の現在値との差が設定値を超えた場合、駆動輪の減速制御を行う走行制御機構が搭載されていることによって前記の課題を解決する。
(もっと読む)
車両の操舵装置
【課題】 乗員に違和感を与えることなく車両を目標軌道に沿って走行させる。
【解決手段】 画像ECUは、道路の左右の白線を認識し車両の目標軌道となる道路中央線を求めるとともに、道路中央線に対する車両の横方向変位量D、車両姿勢角θおよび道路中央線の曲率半径Rを算出する。メインECUは、画像ECUで算出された横方向変位量D、車両姿勢角θに基づいて車両の目標ヨーレートγ*および目標車体スリップ角β*を算出し(S25,S26)、この目標ヨーレートγ*および目標車体スリップ角β*が得られるような前後輪の目標転舵角δf*,δr*を算出して(S27)、前輪モータECUおよび後輪モータECUに転舵制御指令を出力する(S28)。
(もっと読む)
速度制御方法及び速度制御装置
【課題】物体の通過する軌跡上の各点における曲率に応じた速度で物体を移動させる速度制御方法の提供。
【解決手段】軌跡の座標データを入力、軌跡上の各点における曲率を計算、算出された各点での曲率から各点での物体の速度を(1)式に示される角速度を用いた(2)式にて計算、算出された各点での速度を物体に出力。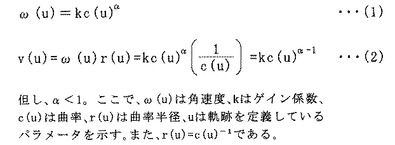 (もっと読む)
(もっと読む)
1 - 7 / 7
[ Back to top ]