
Fターム[5H303GG04]の内容
Fターム[5H303GG04]に分類される特許
1 - 10 / 10
制御データ発生装置
【課題】自動操作と手動操作が可能な操作子において、自動位置決め完了時の実位置と目標位置との誤差を、その後の手動操作に際して実効的に解消し、違和感のない制御データを発生する。
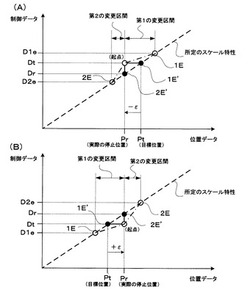
【解決手段】通常は所定のスケール特性に従う制御データを位置データに応じて発生する。操作子が目標位置Ptに自動位置決めされた直後の手動操作において変更スケール特性を適用する。変更スケール特性においては、位置決め完了時における実位置Prに対応して前記所定のスケール特性上の目標位置Ptに対応する制御データDtが出力されるように起点を設定し、該起点の位置から少なくとも目標位置に達するまでの区間を含む第1の変更区間を設定し、位置検出器12で検出された位置データに対応して発生される制御データが、起点に対応する制御データDtから該第1の変更区間の終点の位置に対応する前記所定のスケール特性上の制御データまで漸次変化するようにする。
(もっと読む)
アクチュエータの回転伝達誤差補正方法およびアクチュエータの駆動制御装置

【課題】出力軸を支持する転がり軸受けに起因する回転伝達誤差を補正できるアクチュエータの回転伝達誤差補正方法を提案すること。
【解決手段】アクチュエータ2の出力軸6を支持するベアリング7の転動体7cの1つにマグネット10を組み込み、ホールセンサ12によってマグネット入りの回転位置検出用転動体11が1回転することを検出し、1回転の間において、モータ軸4を一定角度回転させる毎に出力軸6の実回転位置を検出する。検出結果に基づきモータ軸4の各回転位置における、出力軸6の実回転位置のその目標回転位置からのずれ量を算出して記憶部1aに記憶する。駆動制御装置1は、アクチュエータ2の駆動制御時には、記憶部1aに記憶されているずれ量に基づき出力軸6の回転位置を補正し、ベアリング7に起因する回転伝達誤差を除去する。
(もっと読む)
サーボ装置
【課題】サーボ装置で駆動される模型飛行機の引込み脚を、停止位置に保持電流を消費せずに維持できるようにする。
【解決手段】サーボ装置10は、出力軸の目標位置信号と、サーボモータ16から得られる出力軸の現在位置信号等との誤差を増幅手段21で増幅し、PWM 波形としてモータに与え、誤差が小さくなる方向にモータを駆動する。不感帯設定手段23は、誤差がフィードバック制御によって修正すべき大きさか否かを判断する基準値を設定する。モータ停止と判断された場合、不感帯は通常の0.4 °から10°に変更される。モータが停止すると外力が加わってもサーボ装置には停止位置で外力に対する保持電流は流れず、電力の無駄な消費が抑えられる。
(もっと読む)
自給式液圧アクチュエータ・システム
【課題】 駆動方向を容易に変更できる液圧線形アクチュエータ・システムを提供する。
【解決手段】 本発明の液圧線形アクチュエータ・システムは、ほぼ一定の速度で一方向に回転するよう構成されたポンプを有する。その方向とシステムを通る流体の速度は、ポンプのロータとステータとの間の位置関係を調節することによる制御される。この位置関係は、順方向流状態と、非流通状態と、逆方向流状態の間で調節可能である。液圧線形アクチュエータは、システムを通る流体の流れに反応して、ポンプの順方向流状態による第1方向とポンプの逆方向流状態による第2方向に移動する。
(もっと読む)
ジンバル軸受の摩擦を制限するようにフレックスピボットを有するジンバルサーボシステム用軸受組立体
ジンバルサーボシステムへの使用に適した支承組立体が提供される。支承組立体は、ハウジングと、第1のシャフトと、第1のシャフトがハウジングに対して軸線回りに回転するように第1のシャフトをハウジングに回転可能に結合する軸受と、ペイロードに結合されるようになった第1の端部を有する第2のシャフトと、フレックスピボット要素とを有し、このフレックスピボット要素は、第2のシャフトがフレックスピボット要素を介して第1のシャフトに対して回転するよう第1のシャフトの端部を第2のシャフトの第2の端部に回動可能に結合する。第2のシャフトの回転に応答して、フレックスピボット要素は、第1のシャフトの軸線回りに所与の角度回動するようになっている。回動角度は、第1のシャフトに対する第2のシャフトの変位を反映し、軸受の摩擦外乱に対応する。  (もっと読む)
(もっと読む)
アクチュエータの位置変動抑制方法
【課題】波動歯車減速機の角度伝達誤差に起因するアクチュエータ出力軸の低回転速度領域での回転変動を効果的に抑制すること。
【解決手段】アクチュエータ出力軸7のフィードバック制御に用いる速度指令ωrには、波動歯車減速機5の角度伝達誤差による位置成分が加えられている。また、その速度フィードバック値ωfには、モータ回転軸4の検出位置から演算された速度に、波動歯車減速機の角度伝達誤差による速度成分が加えられている。これらの速度指令ωrおよび速度フィードバック値ωfを用いてアクチュエータ出力軸7の回転をフィードバック制御することにより、波動歯車減速機5の角度伝達誤差に起因するアクチュエータ出力軸7の回転位置変動、特に、モータ回転軸4が100rpm程度以下の低速回転領域におけるアクチュエータ出力軸7の回転位置変動を確実に抑制できる。
(もっと読む)
小型電動アクチュエータ
【課題】ロッドの位置と移動速度を簡単な構成で制御することができる小型電動アクチュエータを提供すること。
【解決手段】駆動源である電動モータ3の回転を減速機構によって減速してねじ軸4に伝達し、該ねじ軸4に進退可能に螺合するロッド5をねじ軸4の回転によって往復直線移動させる小型電動アクチュエータ1において、前記ロッド5の移動方向に沿ってポテンショメータ(可変抵抗器)10を配設するとともに、該ポテンショメータ10の摺動子10aを前記ロッド5に固定し、該摺動子10aの移動に伴うポテンショメータ10の抵抗変化による電圧変化に基づいてロッド5の位置を制御する。又、前記電動モータ3をDCモータ(可変速モータ)で構成し、前記ポテンショメータ10の抵抗変化による電圧の変化率に基づいてロッド5の移動速度を制御する。
(もっと読む)
位置決め制御装置および位置決め制御方法
【課題】駆動装置を制御することにより可動部材の位置を制御する位置決め制御装置において、可動部材の位置決め精度の向上を図る。
【解決手段】電動モータ16に固有のDCゲイン誤差データ、増幅器22に固有のDCゲイン誤差データに基づいて個別ゲインKvIDの値が取得され、設定される。電動モータ16への個別電流指令値は、フィードフォワード制御指令値IFFとフィードバック制御指令値IFBとの和に個別ゲインKvIDを掛けた値IOUTIDとして取得されて、出力される。このように、モータ固有のDCゲイン誤差データ、増幅器固有のDCゲイン誤差データに基づいて可変ゲインの値が設定され、その値に基づいて個別電流指令値が作成されるため、駆動装置1個1個の特性のバラツキに起因する可動部材12の位置決め精度の低下を抑制することができる。
(もっと読む)
立体形状再生装置および立体形状記録再生装置
【課題】移動物体に対しても適用可能であり、精度の高い立体形状を簡易かつ迅速に再生し、さらには立体形状を測定し、再生することができること。
【解決手段】三角形の各辺上に配置され、電気的変位量を機械的変位量に変換する駆動素子と、各駆動素子に電気的変位量を与えて各駆動素子を機械的に変位させる駆動制御を行う制御手段とを備え、立体形状を簡易かつ迅速に再生する。また、三角形の各辺上に配置され、機械的変位量を電気的変位量に変換する検出素子を併用して、立体形状を測定し、再生する。
(もっと読む)
位置制御システム
【課題】 油圧アクチュエータにより動作制御される制御対象の位置制御を行う位置制御システムにおいて、ポペット型電磁弁を用いて油の流量制御を行い、弁からの油漏れを抑制すると共に制御対象の位置制御を精度よく行うことのできる位置制御システムを提供する。
【解決手段】油圧アクチュエータ101により動作制御される制御対象105の位置制御を行う位置制御システム100であって、前記油圧アクチュエータ101の駆動制御を行う電磁弁1〜4と、前記電磁弁1〜4を介して前記油圧アクチュエータ101に油を供給するポンプ8と、前記電磁弁1〜4の開閉動作をパルス幅変調制御により行う弁作動手段12、13と、前記制御対象105の位置を検出する位置検出手段6と、前記電磁弁1〜4に供給される油の温度を検出する油温度検出手段10と、前記位置検出手段6が検出した位置及び前記油温度検出手段10が検出した油温度に基づき前記弁作動手段12、13が制御するパルス幅のデューティ比を決定する制御計算手段20とを備える。
(もっと読む)
1 - 10 / 10
[ Back to top ]