
Fターム[5H501BB07]の内容
Fターム[5H501BB07]に分類される特許
1 - 20 / 45
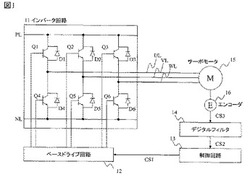
モータ制御装置
【課題】
エンコーダの分解能が高くなり、出力されたデジタル信号の周波数が高くなったときにも誤動作を起こさないモータ制御装置を提供することを目的とする。
【解決手段】
複数段のDフリップフロップから構成されており、各Dフリップフロップの出力のHレベルの数に応じて出力を決定しノイズを除去することができるデジタルフィルタを備える。これによりエンコーダの分解能が高くなり、出力されたデジタル信号の周波数が高くなった場合にもノイズが効果的に除去可能であり、誤動作が起こりにくいモータ制御装置を提供することができる。
(もっと読む)
回転位相検出装置、レゾルバ装置、駆動装置、回転位相検出回路、および回転位相検出方法

【課題】レゾルバを用いて検出する回転位相の温度ドリフトを抑制する。
【解決手段】回転位相検出装置1は、励磁巻線13,14に対する励磁受信巻線15の回転位相θに応じた電圧波形信号を、出力巻線17から出力するレゾルバ6と、出力巻線17に接続され、出力巻線17とは逆の温度特性の抵抗を有する補償抵抗回路21と、出力巻線17および補償抵抗回路21が直列に接続され、出力巻線17から出力された電圧波形信号が補償抵抗回路21を通じて入力され、入力される信号の電圧波形に基づいて回転位相を検出する検出部7とを有する。補償抵抗回路21は、レゾルバ6に設けられる。検出部7は、補償抵抗回路21を通じて入力される信号の電圧の大きさからレゾルバ6の温度を推定し、推定した温度に応じた補償量で、電圧波形信号に基づいて検出した回転位相θ(DTCT)に含まれる温度誤差Δθを補償する。
(もっと読む)
モータ駆動制御装置
【課題】検出回転数からのモータの回転数の推定性能をより向上する。
【解決手段】検出回転数算出部9により駆動モータ2の回転数を算出して検出し、検出回転数算出部9の検出回転数に基づき、移動平均回転数算出部10は細かな変動の影響を受けない移動平均回転数を算出する。さらに、変化量算出部11により移動平均回転数の時間的な変化量を算出し、回転数推定部12により、移動平均回転数に、前記変化量と移動平均回転数の算出に要する時間相当の所定数との積の定数倍の補正回転数を加算し、前記変化量の正負に応じて移動平均回転数を前記補正回転数だけ増減補正する。そして、駆動モータ2の実回転数が急変しても、その変化率(時間的な変化量)は一定であり、実回転数と移動平均回転数とは略一定の差で遷移(変化)し、実回転数に対して移動平均回転数が移動平均の算出時間相等の時間だけ遅れて実回転数と同じように変化する。
(もっと読む)
サーボ制御装置
【課題】送り機構のボールスクリューが経年変化や温度変化で伸縮してボールスクリューの軸方向に沿う剛性が変化しても、このような剛性変化を補償して、テーブルの位置を正確にサーボ制御する
【解決手段】制御部100は、サーボモータ40をフィードバック制御して、負荷であるテーブル02をサーボ制御する。逆特性モデル300は、機械系の動的誤差を補償する速度補償信号V300を求めて、フィードフォワード補償制御をする。剛性変化補償部400は、ボールスクリュー30のネジ部31の軸方向に沿う剛性が変化したら、この剛性変化に応じて、逆特性モデル300の補償制御用伝達関数に含まれているネジ部の軸方向に沿う剛性値を変化させる。
(もっと読む)
電流検出方法と、それを利用したインバータ装置やコンバータ装置、並びに、かかる装置を備えたモータ駆動装置及び冷凍空調機器
【課題】過変調領域でも安定に運転できる電流検出方法、それを利用した、インバータ装置やコンバータ装置、更には、低コストのモータ駆動装置、冷凍空調機器を提供する。
【解決手段】交流モータと、交流モータを駆動するインバータと、インバータ直流側の母線電流もしくは各アーム電流を検出する電流検出手段と、検出された電流検出値を用いて交流モータを制御する制御手段を備えたモータ駆動装置において、電流検出手段から得た電流の過去検出値もしくは前記制御手段の電流指令値から交流モータ電流参考値を算出し、かつ、電流検出手段で交流モータ電流の1相分の電流のみしか検出できない場合には、1相分の電流検出値と電流参考値との誤差を算出し、当該誤差を用いて、検出できない相の交流モータ電流を推定する。
(もっと読む)
電動パワーステアリング装置
【課題】電源電圧が低下した場合において、当該電圧の低下をより確実に抑制するとともに、アシスト可能領域を好適に維持することができる電動パワーステアリング装置を提供する。
【解決手段】マイクロコンピュータは、電源電圧の値が特定の閾値以下に低下した旨判断される場合、モータに印加される電力の値を通常時よりも小さな値に制限するべく昇圧制御する。この構成によれば、モータ特性の最大値付近で操舵補助を実施していた場合であれ、バッテリの電圧が低下した旨判断されるときには、昇圧回路の昇圧制御を通じてモータ電力が通常時よりも小さな値に制限される。このため、バッテリの電圧のさらなる低下がより確実に抑制される。また、大きな電力を必要としない操舵補助領域については継続して操舵補助を実行することが可能となる。
(もっと読む)
モータ駆動装置
【課題】パワー素子のスイッチングノイズや電流リップルの影響を小さくし、かつ電流制御の応答性の向上を実現するモータ駆動装置を提供する。
【解決手段】三角波のキャリア信号11を出力するキャリア信号発生器1と、キャリア信号11を基準にして電流検出トリガ12を出力する電流検出タイミング発生器2と、一定区間の平均電流値を検出するモータ電流検出器3と、モータ電流検出器3で検出した平均電流値を電流指令値に追随させるように電流制御を行い、キャリア信号11の山谷で電圧指令値を更新する電流制御器4と、キャリア信号11と電圧指令値を入力し、PWM信号をインバータ部に出力するPWM制御器5を備え、キャリア信号11の山谷の周期と平均電流値を検出する一定区間の時間を一致させるモータ駆動装置。
(もっと読む)
スイッチトリラクタンスモータ制御方法およびその装置
【課題】回転子の回転位置の推定精度を高く維持する。
【解決手段】回転位置推定相を決定する推定相決定部61と、決定された回転位置推定相における巻線電流iを選択する推定相電流選択部62と、選択された巻線電流i、インバータにおける直流電圧VdcおよびPWMパターンを入力として、決定された回転位置推定相における磁束鎖交数λを算出する推定相磁束鎖交数算出部63と、選択された巻線電流iおよび算出された磁束鎖交数λを入力として回転位置推定演算を行って第1推定回転位置θMを出力する位置推定演算部64と、過去の推定回転位置と過去の回転速度に基づいてバックアップ回転位置としての第2推定回転位置θpを算出するバックアップ位置算出部65と、第1推定回転位置θMまたは第2推定回転位置θpを選択して最終的に得られた推定回転位置θeとして出力する推定回転位置選択部66とを有している。
(もっと読む)
可変分解能回路付電流検出装置
【課題】負荷へ供給される電流を所望の分解能で検出し、動作環境温度の変動のある場合でも、測定誤差を低減した電流検出分解能を有する電流検出装置を提供する。
【解決手段】負荷へ供給される供給電流値に比例した電圧を出力する電流検出器(電流センサ)21と、この電流検出器から出力された電圧を入力して増幅するオペアンプ、ダイオード、及び、抵抗を有する可変分解能回路22と、可変分解能回路の出力を入力とする電圧値をデジタル量に変換する変換手段(A/Dコンバータ)23とを備えた可変分解能回路付電流検出装置20であって、可変分解能回路は、電流検出器の出力電圧に基づいてオペアンプの増幅率を可変とする。
(もっと読む)
配電線路の電磁誘導電力を電気自動車の電源とする方式。
【課題】 電気自動車の電源に配電線路の電磁誘導電力が利用できないか、と考えた。
【解決手段】 配電線路の低周波電力を周波数変換器によって高周波を発生せしめ、この高周波の電磁誘導電力によって電気自動車側の電磁誘導線輪に電磁誘導せしめ、その高周波電磁誘導電力を再度、使用する電気自動車に最も適合した回転速度の電動機に適合した低周波電力に戻し、この電動機を駆動して電気自動車を走らせる。
(もっと読む)
外乱補償装置
【課題】モータに作用する負荷トルクの変動だけでなく、前記モータの電機子インダクタンス、直流抵抗(発熱により大きく変動する)および逆起電力定数の影響の変動をも補償できる外乱補償装置を提供する。
【解決手段】モータ3の回転速度を検出する速度センサ11と、モータ3の電機子インダクタンスL、直流抵抗Rおよび逆起電力Eemfがモータ3の回転動作に与える影響を反映させた影響合成信号ω(JLs2+JRs+KtKemf)を、回転速度ωから生成する合成信号生成部13と、影響合成信号に基づいて、前記電力供給指令値Eiを補正する補正部15と、を備える。
(もっと読む)
回転体駆動制御装置
【課題】低コストかつ、高精度の回転体駆動制御装置を提供する。
【解決手段】回転体と、前記回転体の回転軸に取り付けられた多数のスリットをリング状に配置したコードホイールと、前記コードホイールのスリットが通過する間隔を矩形波状の電気信号に変換するロータリーエンコーダと、前記ロータリーエンコーダの電気信号から前記回転体の角速度を検出する速度検出手段と、前記回転体を回転駆動するモータと、前記速度検出手段による角速度情報から前記モータの回転速度設定を演算する演算手段と、演算された回転速度設定を基にモータ駆動クロックの周期を増減して前記モータの回転速度を可変するモータ制御手段と、前記モータ駆動クロック数をカウントする第一のカウント手段とを備え、前記第一のカウント手段が出力するカウント値を前記回転体の位相情報として扱い、前記回転体の角速度を制御する。
(もっと読む)
車両駆動モータ制御装置
【課題】車両駆動モータを制御する装置において、車両駆動モータの状態および車両駆動モータが配置された環境に応じた制御を行うことを目的とする。
【解決手段】コントロールユニット16は、運転操作指令、モータ22の回転速度等に基づいて、目標とするトルク指令値を求める。そして、トルク制御マップを参照し、その回転速度およびトルク指令値の条件において、分担電圧DVが許容電圧PDを超えるか否かを判定する。コントロールユニット16は、分担電圧DVが許容電圧PD以下であるときは、そのトルク指令値に基づいて昇圧コンバータ12およびインバータ14を制御する。一方、分担電圧DVが許容電圧PDを超えるときは、コントロールユニット16は、トルク制御マップを参照し、分担電圧DVが許容電圧PD以下となるよう、昇圧コンバータ12およびインバータ14の制御によって界磁巻線に流れる電流を調整する。
(もっと読む)
モータ制御装置
【課題】外部からの電波照射などの外乱がある状況において、コストがかからずに、良好にモータの制御を行う。
【解決手段】駆動指令信号S1と駆動指令信号S1のレベルが低下した場合のデューティ比を求めるための第2の閾値とを比較して、駆動指令信号S1の第2のデューティ比を演算し、駆動指令信号S1のハイレベルが第1の閾値より小さくかつ第2の閾値より大きく、かつローレベルが第2の閾値より小さい場合、すなわち、駆動指令信号のレベルが低下した場合(ステップ104でN、ステップ108でY)には、第2のデューティ比に対応するモータ制御用デューティ比のパルスを有する制御信号を生成して(ステップ110)、生成された制御信号に基づいてモータの回転を制御する。
(もっと読む)
回転電機制御システム
【課題】回転電機の出力を維持すると共に、回転電機を駆動するインバータのスイッチング素子の発熱を抑制可能なモータ制御システムを提供する。
【解決手段】回転電機2と、回転電機2の目標トルク及び回転数に応じて直流電源1の出力を交流に変換するインバータ3と、回転電機2の目標トルクに応じて設定される電圧指令値に基づいて直流電源1の出力を昇圧するコンバータ4と、インバータ3及びコンバータ4を制御する制御部5と、インバータ3を構成するスイッチング素子6の温度を検出する温度検出部7と、を備え、スイッチング素子6の温度が所定の制限温度に達した場合、制御部が、インバータ3への制御方式を、パルス幅変調制御から矩形波制御に変更する。
(もっと読む)
アクチュエータのストローク学習方法およびそのシステム
【課題】外部の影響を考慮したアクチュエータのストローク学習方法を実現する。
【解決手段】アクチュエータ10が車両に搭載されるときの環境と磁気的に同一または類似の磁気的環境を、他ACT71、他モータ72および他センサ73を用いて作成し、前記磁気的環境に影響されず、かつ、影響を及ぼさないレーザ変位計40にてアクチュエータ10のストロークを検出できるように設定し、前記磁気的環境下で、アクチュエータ10を作動させ、レーザ変位計40で検出したストロークを、ティーチングマシン30が学習する。
(もっと読む)
サーボ制御装置
【課題】工作機械の負荷等に発生する「ひずみ」や「粘性」等があっても、簡単な制御演算により、工作機械の負荷位置を正確に制御する。
【解決手段】モータ12の回転運動を、ボールねじ送り部にて直線運動にして負荷であるテーブル02を直線移動させている。逆特性モデル300には、負荷であるテーブル02のイナーシャ、粘性、ばね剛性を考慮しつつ、ばね粘性を無視すると共に、モータ12のイナーシャや粘性を考慮して、「ひずみ」等を補償する補償制御用伝達関数が設定されている。したがって指令位置θを、補償伝達用関数にて補償して得た補償速度V300を、位置制御ループに追加することにより、「ひずみ」等に起因する誤差を補償することができる。また、負荷のばね粘性を無視して、補償制御用伝達関数を設定しているため、この補償制御用伝達関数を簡略化でき、補償演算が簡単にできる。
(もっと読む)
携帯型電動工具
【課題】モータの回転速度を作動中に自動的に決定して制御するための手段を有する携帯型電動工具を提供することが本発明の目的である。
【解決手段】ドリルの出力部6を駆動するための電動モータ4を収容する本体2を具備するハンマードリルが開示される。振動変換器12がモータ4によって生み出された振動を検知するとともに検知した振動に応じた振動信号を生成する。電子モジュール10が、モータの回転速度を制御するコントローラ10aと、振動変換器12から振動信号を受信して、振動信号に基づいてモータ4の回転速度を決定して、コントローラ10aにモータの回転速度を制御させるために、出力信号をコントローラ10aに供給する信号処理装置10bとを具備する。
(もっと読む)
モータ駆動用インバータ制御装置
【課題】インバータに印加される電圧状態、インバータが駆動するモータに要求されるトルク状態によらず、インバータの出力限界内で回転数制御により制御されたモータ駆動を実現させる。
【解決手段】インバータに印加される電圧を検出するインバータ印加電圧検出部6と、回転数指示部9からの指示回転数でモータを駆動させるために必要な指示電圧を演算する指示電圧演算部10と、検出されたインバータ印加電圧と演算された指示電圧を比較する電圧比較部11と、電圧比較部に結果により回転数指示部からの指示回転数を制限する回転数指示制限部12を備えることで、インバータ印加電圧、モータへの要求トルクによらずインバータの出力限界内での回転数制御により制御されたモータ駆動を実現させる。
(もっと読む)
モータ制御装置とその制御方法
【課題】特定の期間における特定の時間においてモータ制御装置の制御ゲインを変更することができるモータ制御装置とその制御方法を提供する。
【解決手段】カレンダー機能を有するカレンダー部(120)と、制御ゲインを変更する期間を予め記憶する日付時刻記憶部(121)と、制御ゲインを選択することができるゲイン選択部(110)と、変更される制御ゲインの値を予め記憶するゲイン記憶部(111)を備え、現在の日付および時刻が日付時刻記憶部に設定された範囲内であれば、カレンダー部では、ゲイン選択部に対して制御ゲインの変更を要求し、ゲイン選択部は制御ゲインをゲイン記憶部に設定されている値に所定の時間の間変更する。
(もっと読む)
1 - 20 / 45
[ Back to top ]