
Fターム[5H501FF00]の内容
電動機の制御一般 (20,975) | 主に制御を行う領域 (634)
Fターム[5H501FF00]の下位に属するFターム
Fターム[5H501FF00]に分類される特許
1 - 3 / 3
モータ駆動回路
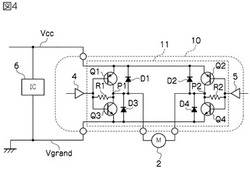
【課題】モータにおいて発生した逆起電力に起因する誤動作や故障の発生を防止し得る簡易な構成のモータ駆動回路を提案する。
【解決手段】直列接続された2つのスイッチ素子を少なくとも一組有し、2つのスイッチ素子のうち、電源側に接続される一方のスイッチ素子に対して並列にダイオードが接続されると共に、2つのスイッチ素子の接続中点に駆動対象のモータの端子が接続されるモータ駆動回路において、モータにおいて発生した逆起電力の電圧を、2つのスイッチ素子の接続中点から2つのスイッチ素子のうちのグランド側に接続される他方のスイッチ素子の入力端に伝達する電圧伝達素子を設けるようにした。
(もっと読む)
モータ制御装置

【課題】モータ側の出力軸とレンジ切換機構のマニュアル軸との嵌合連結部に遊びが存在するシステムにおいて、耐久性を低下させることなく遊び量を学習できるようにする。
【解決手段】モータ13側の出力軸とレンジ切換機構11のマニュアル軸15との間の嵌合連結部に存在する遊び量を学習する場合、レンジ切換機構11のレンジがPレンジで留まっているときに、ディテントレバー18がPレンジの位置で留まっている状態から動かないような小さいトルクでモータ13を回転させる。このようにすれば、ディテントレバー18がPレンジの位置で留まっている状態で、出力軸のみが嵌合連結部の遊びの範囲内で空転し、その遊びの端に突き当たった位置で出力軸の回転が停止する。このような処理を正転方向と逆転方向の両方向で行うことで、遊びの両端位置を出力軸センサ16で検出し、その遊びの両端位置の検出値の差分値を遊び量として算出して学習する。
(もっと読む)
モータ制御装置
【課題】 慣性モーメントが変動しても安定で、制御性が高いモータ制御装置を提供する。
【解決手段】 位置偏差に比例ゲインを乗算し第1速度指令を生成する比例制御器(6)と、位置指令を微分し第2速度指令を生成する速度フィードフォワード制御器(8)と、速度偏差を比例・積分制御処理をし第1トルク指令を生成する比例積分器(15)と、位置偏差に比例ゲインを乗算し第2トルク指令を生成するトルクFF部(17)と、位置指令に比例ゲインを乗算し第3トルク指令を生成するトルクフィードフォワード制御器(21)と、モータ速度と速度偏差から粘性摩擦を同定する粘性摩擦同定器(20)と、第4トルク指令と粘性摩擦同定値から第5トルク指令を生成する加算器(24)と、第5トルク指令と速度偏差から慣性モーメント同定値を生成する慣性モーメント同定器(26)と、第5トルク指令と慣性モーメント同定値からトルク指令を生成する乗算器(27)とを備えた。
(もっと読む)
1 - 3 / 3
[ Back to top ]