
Fターム[5H501FF05]の内容
Fターム[5H501FF05]に分類される特許
1 - 20 / 124
モータ制御装置及びモータ制御方法
回転機の制御装置
モータ制御装置
電子制御装置
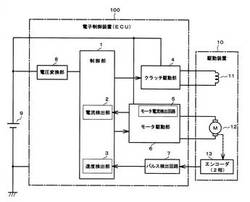
【課題】駆動対象に対する外力の加わり方が異なる場合でも、噛み合わせクラッチの接続を確実に解除する。
【解決手段】電子制御装置100は、バックドアを開閉動作させるために、モータ駆動部6で電動モータ12を回転させ、電動モータ12の駆動力をバックドアに断続して伝達するために、クラッチ駆動部4で噛み合わせクラッチを接続または接続解除させ、電流検出部2で電動モータ12に流れる電流を検出する。モータ駆動部6で電動モータ12を停止させた後、電流検出部2で検出された、電動モータ12に流れた停止直前の電流値がしきい値以上である場合に、モータ駆動部6で電動モータ12を停止前の回転方向と逆方向に所定時間だけ回転させ、停止直前の電流値がしきい値未満である場合に、モータ駆動部6により電動モータ12を停止前の回転方向に所定時間だけ回転させ、かつ、クラッチ駆動部4で噛み合わせクラッチを接続解除させる。
(もっと読む)
油圧制御装置及びそれを備えた四輪駆動車両の駆動力配分装置

【課題】電動モータの故障を高い精度で検知できると共に、電動モータの正常状態を故障と誤検知する確率を低く抑えることができるようにする。
【解決手段】モータ(電動モータ)(37)により駆動されるオイルポンプ(35)から供給される油圧によって前後トルク配分用クラッチ(10)の作動制御を行う四輪駆動車両用の油圧制御装置(60)において、モータ(37)の故障判定を行うモータ故障判定手段(50)は、モータ(37)の故障検知開始時点(t2)からモータ(37)の駆動電流値(I)を積算したモータ駆動電流積算値(Is)の算出を行うと共に、モータ故障判定用の閾値(Ith)を所定の割合で増加させる。そして、モータ駆動電流積算値(Is)が闇値(Ith)以下となった場合、故障確定タイマ(Tm2)のカウント完了を待ってモータ(37)の故障確定判定を行う。
(もっと読む)
電動機の巻線過熱防止装置および電動機の制御装置
【課題】電動機の固定子巻線の過熱を防止し電動機を効率よく駆動させる低コストの巻線過熱防止装置および電動機の制御装置を実現する。
【解決手段】電動機2の制御装置100内に設けられる巻線過熱防止装置1は、電動機2の固定子巻線3に流れる電流から推定される固定子巻線3の温度変化量と電動機2の周囲温度とに基づき巻線温度を計算する固定子巻線温度計算部11と、電動機2の回転子4の位置情報を検出する位置検出器22内の温度検出素子23が示す温度を検出する位置検出器温度検出部12と、巻線温度がアラームレベルを超えたときアラーム信号を出力するアラーム信号出力部13であって、アラームレベルは、周囲温度が所定の温度以下の場合には温度変化量の最大値と周囲温度とに基づき規定された温度であり、周囲温度が所定の温度より高い場合には位置検出器22を過熱から保護するための温度であるアラーム信号出力部13とを備える。
(もっと読む)
電動パワーステアリング装置
【課題】モータロックを防止することにより、システムの安定的な停止が図れ、安全な電動パワーステアリング装置を提供する。
【解決手段】
マイコン17は、短絡異常検出フラグがオンの場合には、短絡異常判定検出中と判断して、積算判定を実行する。そして、マイコン17は、短絡異常確定フラグがオンの場合には、通電不良発生相以外の二相を通電相とするアシスト力を発生中に、通電不良発生相が、通電不良発生相以外の二相のうちの一相と短絡異常確定となったと判断して、アシスト力の発生を停止する。
(もっと読む)
モータ制御装置およびこれを備える電動パワーステアリング装置
【課題】算出するモータの抵抗値と実際のモータの抵抗値との差をより短い期間で小さくすることのできるモータ制御装置、およびこれを備える電動パワーステアリング装置を提供する。
【解決手段】この電動パワーステアリング装置は、ステアリングの操舵状態が保舵状態のとき、過去に算出したモータ抵抗値Rmに応じて算出されるフィルタ値Rfを用いたフィルタ処理により、モータ抵抗値Rmを算出する。また、前回の保舵状態において算出したフィルタ値Rfである前回フィルタ値Rfoldを今回の保舵状態において算出されるモータ抵抗値Rmに反映する補正係数Gを、回転状態のときの電流積算値に基づいて変更する。
(もっと読む)
モータ制御装置
【課題】モータに駆動電流を供給するリレー接点の溶着等による不具合を回避するモータ制御装置を提供する。
【解決手段】比較演算回路33,34により、モータ15に駆動開始、駆動停止の指示を与える外部スイッチ3のON/OFF状態に基づく所定の論理レベルの信号と、モータ15の端子電圧に対応する論理レベルとを比較し、双方の論理レベルが一致すれば、リレー13,14の接点13b,14bに溶着等の異常は発生していないと判定する。一方、双方の論理レベルが一致しない場合には、リレー13,14の接点13b,14bに溶着等の異常が発生し、異常な動作状態にあると判定する。そして、半導体スイッチ39をOFFにして、リレー13,14とバッテリ1との電気的な接続を遮断し、モータ15への給電を停止する。
(もっと読む)
画像形成装置及びモータ駆動制御方法
【課題】モータへの励磁以外の方法でキャリッジおよび用紙の位置固定をし、モータへの駆動電力を止めることで印刷時の消費電力を低減する画像形成装置及びモータ駆動制御方法を提供する。
【解決手段】画像形成装置は、主走査部を駆動する第1のモータと、副走査部を駆動する第2のモータと、前記第1のモータ及び前記第2のモータを駆動制御する駆動制御回路とを有する画像形成装置であって、前記駆動制御回路は、ショートブレーキによる前記第1のモータ及び前記第2のモータのホールド制御手段を備える。
(もっと読む)
電動機駆動装置
【課題】装置全体としての長寿命化を図りつつ、装置全体としての小型化を可能とする電動機駆動装置を提供する。
【解決手段】駆動部12は、横型半導体素子からなる1回路2接点式の切替素子16,17を2つ有している。第1の切替素子16は、コモン端子160を電動機11に接続し、第1の端子161および第2の端子162を電源部15に接続する。第2の切替素子17は、コモン端子170を電動機11に接続し、第1の端子171および第2の端子172を電源部15に接続する。制御部14は、各切替素子16,17において、コモン端子160,170が、第1の端子161,171および第2の端子162,172に対して択一的に接続されるように、各切替素子16,17を個別に切替制御する。
(もっと読む)
モータ制御装置及び画像形成装置
【課題】高速且つ高精度に、駆動対象を目標停止位置に停止可能とする。
【解決手段】モータ制御ユニットは、モータに入力可能な電流上限値を推定し、この上限値に対応する駆動電流でモータを駆動する第一制御処理を、駆動初期において実行する。一方、駆動対象の現動作状態に基づき、第二制御処理に対応するパターンで駆動対象を減速・停止させるのに必要な搬送量である停止必要量Pn=Pc+Pdを算出する。そして、目標停止位置までの残り搬送量Psが停止必要量Pn以下となった時点で、第一制御処理に代えて第二制御処理を実行する。この動作により、第一制御処理を長めに実行して駆動対象を高速に搬送し、第二制御処理では、上記パターンに対応する目標軌跡に追従するように駆動対象の位置P及び速度Vを制御して、駆動対象を精度よく目標停止位置で停止させる。目標軌跡は、減速時の加速度ピークが、モータで実現可能な限界値−Apに設定されてなる。
(もっと読む)
温度推定装置及び温度推定方法
【課題】モータの駆動停止後において、モータを備える電子機器を構成する機器構成部材の温度の推定精度を向上させることができる温度推定装置及び温度推定方法を提供する。
【解決手段】温度推定部53は、ブラシの温度暫定値TZb(n)を推定するブラシ温度暫定値演算部60と、ヨークの温度推定値Ty(n)を取得するヨーク温度推定値演算部70と、ハウジングの温度推定値Th(n)を取得するハウジング温度推定値演算部80と、ブラシの温度推定値Tb(n)を設定するブラシ温度推定値特定部90と、を備えている。ブラシ温度推定値特定部90は、モータの駆動時には、温度暫定値TZb(n)をブラシの今回の温度推定値Tb(n)とし、モータの駆動停止後には、温度暫定値TZb(n)、温度推定値Ty(n)及び温度推定値Th(n)のうち最も高温となる値に基づきブラシの今回の温度推定値Tb(n)を設定する。
(もっと読む)
電動コンプレッサ
【課題】電源接続の解除を検知するまでの時間を短縮し、コンデンサの残留電圧による感電を防止する電動コンプレッサを提供する。
【解決手段】高電圧電源140と接続する電源コネクタ130とパワー素子118との間を接続する電源ライン111の電源供給ライン111aに一端が設けられ、グランドライン111bに他端が設けられたコンデンサ114に対して、電源コネクタ130側の電源供給ライン111aに、高電圧電源140からパワー素子118の方向へ流れる電流を正とし、逆方向に流れる電流を負として検出する電流検出部113を設け、電流検出部113と電源コネクタ130との間に電源供給ライン111aとグランドライン111bとを直結する負荷抵抗112を設ける。制御部116は、電流検出部113によって検出された電流値が0未満になると、高電圧電源140の接続が解除されたと検知する。
(もっと読む)
電動機のフェールセーフ装置
【課題】駆動対象物を駆動する電動機に一時的な瞬断を含む故障を検出した場合は電動機を停止させ、その電動機が停止した後に電動機に問題がないと判断した場合は、その電動機を安全に復帰させるフェールセーフ装置を提供する。
【解決手段】駆動対象物1,2,3,4を駆動する電動機5,6のフェールセーフ装置において、電動機5,6に係る故障を検出する電動機故障検出手段と、電動機を停止させる電動機停止手段と、少なくとも故障に係る電動機に駆動される駆動対象物の動作を阻止する駆動対象物ブレーキ手段と、電動機に係る故障を再度判定する電動機故障再判定手段と、電動機の始動を許可する電動機始動許可手段とを備えている。
(もっと読む)
モータの診断方法
【課題】 車両の走行時と、車両の非走行時のいずれの場合でも、モータコイルの異常を検出することができ、モータ異常への対処を早期に図ることができるモータの診断装置および診断方法を提供する。
【解決手段】 車両の電源が投入されている非走行時に、モータコイルのコイル温度とモータコイルのコイル抵抗または絶縁抵抗とを検出し、コイル温度が閾値を超えるか、または、コイル抵抗もしくは絶縁抵抗が閾値を超えたときモータコイルの異常と検出する始動時異常検出手段98を設けた。さらに車両の走行時に、コイル温度とモータ回転数とモータ印加電圧とモータ電流とを検出し、コイル温度が閾値を超えるか、または、モータ回転数に対応する、モータ印加電圧とモータ電流との関係が設定範囲から外れるときモータコイルの異常と検出する走行時異常検出手段99を設けた。
(もっと読む)
駆動制御装置、シート搬送装置、及び、画像形成装置
【課題】駆動対象が後退する方向の負荷がかかる環境下で、駆動対象を変位させて目標停止位置で停止させるような制御を好適に実行可能な技術を提供する。
【解決手段】用紙搬送制御部は、モータを通じて用紙搬送機構が備える搬送ローラを回転させることにより用紙搬送を実現するものであり、用紙搬送方向とは逆方向の負荷がかかる環境下で、用紙を目標停止位置に精度よく且つ高速に停止させるための構成を有する。具体的に、用紙搬送制御部は、実位置と目標位置との偏差に基づき算出された操作量に対応する駆動電流がモータに供給されるようにモータドライバにPWM信号を入力すると共に、用紙が目標停止位置を超えるまではイネーブル信号としてオン信号を入力する。一方、用紙が目標停止位置をオーバーランすると、目標停止位置に戻るまでイネーブル信号としてオフ信号を入力し、モータドライバにモータに対する電力供給を停止させる。
(もっと読む)
過負荷保護を行うモータ制御装置
【課題】多相交流モータの停止時又は低速回転時に多相交流モータの特定の相に集中的に電流が流れた場合にも過負荷保護を行うことができるモータ制御装置を提供する。
【解決手段】第1温度計算部3は、3相交流モータ8の各相の電流値及び熱モデルを用いて各相の温度を計算し、第2温度計算部4は、3相交流モータ8の全相の電流値の二乗平均値を算出し、二乗平均値及び熱モデルを用いて3相交流モータ8の全相の平均温度を計算する。第1温度判定部5は、3相交流モータ8の各相の温度の少なくとも一つが第1温度より高いか否かを判定し、第2温度判定部6は、3相交流モータ8の全相の平均温度が第2温度より高いか否かを判定する。アラーム信号生成部7は、3相交流モータ8の各相の温度の少なくとも一つが第1温度より高く又は3相交流モータ8の全相の平均温度が第2温度より高い場合、3相交流モータ8の駆動を停止するアラーム信号を生成する。
(もっと読む)
モータ制御装置
【課題】モータの挙動に基づいて励磁相のずれを検出し、励磁相のずれを補正する。
【解決手段】伝達機構3は、パーキング位置と、非パーキング位置とに切換えられるマニュアルレバー3aを有する。マニュアルレバー3aは、SR型のモータ12によって駆動される。モータ12の回転位置は、エンコーダ13によって検出される。制御装置11は、エンコーダ13からの信号を計数することによりロータの位置を示すカウント値Nを算出する。制御装置11は、カウント値Nに基づいて励磁相を選択し、モータ12を駆動する。制御装置11は、P位置と非P位置との間の切換え速度に基づいて、励磁相をずれを検出し、励磁相のずれ方向を判定する。さらに、制御装置11は、検出された励磁相のずれを補正する。励磁相学習処理および壁当て処理を含む初期化処理だけに依存することなく、励磁相のずれを検出し、補正することができる。
(もっと読む)
モータ駆動回路
【課題】モータの駆動回路において、消費電力を少なくすることのできるモータ駆動回路を提供する。
【解決手段】このモータ駆動回路は、外部から入力される回転速度信号VSPに基づいてモータの回転速度を制御するモータドライバを備えたモータに適用される。そして、モータを駆動するとき、第1パルス信号P1と第2パルス信号P2とを形成し、第1パルス信号P1および第2パルス信号P2に基づいて電源動作信号SAを形成するとともに、この電源動作信号SAにより電源回路を動作させて、モータドライバに電力を供給する。さらに、第2パルス信号P2に基づいて回転速度信号VSPを形成し、この回転速度信号VSPをモータドライバへ出力する。
(もっと読む)
1 - 20 / 124
[ Back to top ]