
Fターム[5H501FF01]の内容
Fターム[5H501FF01]に分類される特許
1 - 20 / 125
モータ制御装置
負荷駆動装置および洗濯機
【課題】制御回路を確実にリセット状態にし、電源の再投入を確実に行なう。
【解決手段】本実施形態は、電源入りスイッチが閉成により交流電源が供給されて駆動直流電源を生成する直流電源回路と、駆動直流電源から制御直流電源を生成する制御電源回路と、前記駆動直流電源を基に負荷を駆動する駆動回路と、前記制御直流電源が供給され、動作状態になると前記駆動回路を介して負荷の駆動を制御する制御回路と、前記電源入りスイッチに並列に接続され、該制御回路が動作状態になると閉成動作され、電源切りスイッチが操作されると開放復帰される常開形のスイッチ手段と、前記電源入りスイッチに直列に接続され、前記スイッチ手段の閉成動作と同時に若しくはこれより遅れて開放動作し、前記制御回路が制御直流電源の喪失によりリセット状態になった後に閉成復帰する常閉形のスイッチ手段とを具備する。
(もっと読む)
モータ駆動装置

【課題】簡易的かつ安価な回路構成でモータのソフトスタート制御が可能なモータ駆動装置を提供する。
【解決手段】モータ駆動装置1は、モータ2を駆動する駆動電流Icの向きを制御する制御回路部10と、駆動電流Icを検出する電流検出回路3と、モータ2の回転数を定常回転数まで増加させる起動時に、駆動電流Icの増加速度を電流検出回路3と協働して抑制する電流制限調整回路20とを備えている。電流制限調整回路20は、好ましくは、起動時に駆動電流Icが流れるスイッチ回路22と、起動時にスイッチ回路22を流れる駆動電流Icを時間経過とともに増加させる時定数回路21とを含んでいる。
(もっと読む)
電動モータスタータ部品の組立
【課題】部品の手作業による組立は、組立コストを著しく増加させ得る。
【解決手段】回路部品のトップダウンアセンブリによって、自動化を増大させ、かつアセンブリを減少させることを可能し、回路部品のロボットによる配置、接続および固定を可能にする、電動モータスタータ300接続パッケージのアッセンブリのシステムおよび方法を含む。接続パッケージは、1つのユニットとしてパッケージされた、電動モータスタータと、任意の過負荷プロテクタを含む。モータスタータは、トライアック、変流器、正温度係数(PTC)素子、抵抗およびコンデンサを有する電気回路を含むことができる。接続パッケージのカバー400およびベース200は、回路基板もしくは充填材料を必要とすることなく、接続された回路素子を囲い、しっかりと固定する。この装置設計は、ハウジングによって包囲された後に、モータスタータ回路および回路素子の迅速なテストを可能にする。
(もっと読む)
回転力発生装置
【課題】全節巻型リラクタンスモータから大きな出力トルクを得ることができる回転力発生装置を提供する。
【解決手段】先に通電を開始した「先通電コイル」の通電期間中に、異なる相の「後通電コイル」の通電を開始する際、制御装置は「先通電コイル」の供給電流を一時低下させ、その直後に「後通電コイル」の通電開始とともに「先通電コイル」の供給電流を増加させる。「先通電コイル」の供給電流を一時低下させることにより「後通電コイル」の通電開始時における相互インダクタンスの影響を抑えることができ、「後通電コイル」の通電開始時において「先通電コイル」と「後通電コイル」の両方へ多くの電流を流すことができる。その結果、特に中高速回転域において全節巻型リラクタンスモータの出力トルクを増大させることができる。
(もっと読む)
モーター駆動方法、モーター駆動装置およびロボット
【課題】ロボットアームなどの被駆動部を高速で動作させることができるモーターの駆動方法、駆動装置およびロボットを提供する。
【解決手段】モーターの駆動トルク計測データと回転数計測データと、を取得する駆動データ取得工程と、前記駆動トルク計測データと前記回転数計測データと、を前記モーターの回転数/トルク特性テーブルと比較する比較工程と、前記比較工程の比較結果において、前記駆動トルク計測データと前記回転数計測データとが、前記回転数/トルク特性テーブルの駆動可能領域境界にある場合、前記モーターの駆動電圧を昇圧させる昇電圧工程と、を備えるモーター駆動方法。
(もっと読む)
電動モータの制御装置およびその制御方法
【課題】加速性も含めた作業操作上の違和感を低減すること。
【解決手段】作業モードを設定するモード切替部と、設定される作業モードによって予め設定される電動モータの最大出力を取得する作業モード・旋回最大出力変換テーブルTB11と、電動モータの回転速度を検出する回転センサと、前記回転速度と前記最大出力とをもとにトルク制限値Tlimを演算するトルク制限値演算部105と、前記電動モータの加速時に、トルク制限値Tlimによって前記電動モータのトルクを制限するトルク制限手段と、を備える。
(もっと読む)
電動機駆動装置
【課題】装置全体としての長寿命化を図りつつ、装置全体としての小型化を可能とする電動機駆動装置を提供する。
【解決手段】駆動部12は、横型半導体素子からなる1回路2接点式の切替素子16,17を2つ有している。第1の切替素子16は、コモン端子160を電動機11に接続し、第1の端子161および第2の端子162を電源部15に接続する。第2の切替素子17は、コモン端子170を電動機11に接続し、第1の端子171および第2の端子172を電源部15に接続する。制御部14は、各切替素子16,17において、コモン端子160,170が、第1の端子161,171および第2の端子162,172に対して択一的に接続されるように、各切替素子16,17を個別に切替制御する。
(もっと読む)
駆動制御装置、画像形成装置、駆動制御方法及びプログラム
【課題】起動時において、機構のバックラッシュ等のギヤの噛合いで生じる衝撃によってエンコーダ等の検出系が加振され、機構の速度や位置が誤検出された場合であっても、フィードバック制御系が安定となるような駆動制御装置、画像形成装置、駆動制御方法及びプログラムを提供すること。
【解決手段】電動機と、前記電動機の出力を伝達する伝達機構部と、前記伝達機構部に連結することで前記電動機の出力により駆動される従動機構部と、前記電動機、前記伝達機構部又は前記従動機構部のいずれか1つの速度又は位置を検出する検出部と、前記検出部の出力値と目標値との偏差の値に基づき、補償器を用いて所定の演算を行う補償器演算部と、前記補償器演算部の結果に基づいて前記電動機を駆動させる電動機駆動部と、を有する駆動制御装置であって、前記補償器演算部に入力する前記偏差の値に制限をかける偏差制限部を有する駆動制御装置によって解決される。
(もっと読む)
電動機のフェールセーフ装置
【課題】駆動対象物を駆動する電動機に一時的な瞬断を含む故障を検出した場合は電動機を停止させ、その電動機が停止した後に電動機に問題がないと判断した場合は、その電動機を安全に復帰させるフェールセーフ装置を提供する。
【解決手段】駆動対象物1,2,3,4を駆動する電動機5,6のフェールセーフ装置において、電動機5,6に係る故障を検出する電動機故障検出手段と、電動機を停止させる電動機停止手段と、少なくとも故障に係る電動機に駆動される駆動対象物の動作を阻止する駆動対象物ブレーキ手段と、電動機に係る故障を再度判定する電動機故障再判定手段と、電動機の始動を許可する電動機始動許可手段とを備えている。
(もっと読む)
モータ駆動回路
【課題】モータの駆動回路において、消費電力を少なくすることのできるモータ駆動回路を提供する。
【解決手段】このモータ駆動回路は、外部から入力される回転速度信号VSPに基づいてモータの回転速度を制御するモータドライバを備えたモータに適用される。そして、モータを駆動するとき、第1パルス信号P1と第2パルス信号P2とを形成し、第1パルス信号P1および第2パルス信号P2に基づいて電源動作信号SAを形成するとともに、この電源動作信号SAにより電源回路を動作させて、モータドライバに電力を供給する。さらに、第2パルス信号P2に基づいて回転速度信号VSPを形成し、この回転速度信号VSPをモータドライバへ出力する。
(もっと読む)
モータ制御装置
【課題】使用者が遊び感覚等で電源スイッチのオン/オフの切換操作を繰り返しても、通電相学習処理によるモータ又はモータ駆動回路の発熱を抑えてモータ又はモータ駆動回路の寿命低下や故障を未然に防止する。
【解決手段】電源投入後の初期駆動時に、モータ14の通電相の切り換えを所定のタイムスケジュールで一巡させてエンコーダ61のパルス信号をカウントし、初期駆動終了時のエンコーダカウント値とモータ14の回転角度と通電相との対応関係を通電相学習値として学習し、その後の通常駆動時に、エンコーダカウント値と通電相学習値とに基づいて通電相を決定する。電源スイッチ72のオフ操作後も所定時間が経過するまでECUリレー73をオン状態に維持してレンジ切換ECU20への電源供給を継続し、電源スイッチ72のオフ操作後に電源オン状態を継続する期間に電源スイッチ72がオン操作されても通電相学習処理を実行しない。
(もっと読む)
モータの駆動装置、駆動方法および入力装置
【課題】所望の振動波形を実現するモータの駆動装置およびこれを用いた入力装置を提供する。
【解決手段】入力装置100は、タッチパネル(入力操作部)1と、入力判定部2と、モータの駆動装置(駆動装置)3と、モータ4と、振動部5とを備えている。また、駆動装置3は、目標波形生成部11と、加速度センサ(振動検出部)12と、波形整形部13と、増幅部(駆動信号生成部)14とを有する。振動部5の実際の振動波形を検出する加速度センサ12を設け、実振動波形が目標振動波形に近づくよう、フィードバック制御を行う。そのため、より正確に目標とする振動波形を実現できる。
(もっと読む)
指針型表示器のモータ制御装置
【課題】機械式のアナログ式表示器に用いられ、指針を滑らかに移動させることによって見た目に違和感のない指針型表示器を実現するモータ制御装置を提供する。
【解決手段】モータ駆動制御部11は、所定時間毎に順次入力されるデータDaをデータ受信部10が複数受信すると、受信した複数のデータDaのうち少なくとも最初に受信したデータDaと最後に受信したデータDaから指針の回転量を算出するとともに、最初のデータDaを受信してから最後のデータDaを受信するまでの時間を指針の移動時間に設定する。またモータ駆動制御部11は、上記移動時間で上記回転量だけ指針を連続的に回転させる回転速度であって、上記移動時間の中間期間に比べて上記移動期間の開始期間及び終了期間が低速となる回転速度を算出し、指針が上記回転速度で回転するようにモータ駆動部12を制御する。
(もっと読む)
モータ駆動回路
【課題】駆動回路の電源電圧が立上る場合において当該電源電圧が所定電圧より低い期間、拘束保護回路の動作に関わらず、駆動コイルに駆動電流を供給する。
【解決手段】 モータの駆動コイルに駆動電流を供給する駆動回路と、前記駆動回路の動作を制御する制御回路と、前記駆動回路が前記駆動コイルに駆動電流を供給しているにも関わらず、前記モータの回転を示す回転信号が所定期間発生しない場合、前記駆動回路が前記駆動コイルへの駆動電流の供給を停止するように前記制御回路の動作を制御する拘束保護回路と、前記制御回路に対する前記拘束保護回路の制御を禁止する禁止回路と、を備える。
(もっと読む)
モータ制御装置
【課題】使用者が遊び感覚等で電源投入と切断の操作を繰り返しても、モータの発熱(温度上昇)を抑えて、モータの寿命低下や故障を未然に防止できるようにする。
【解決手段】電源投入後の初期駆動時に、モータ12の通電相の切り換えを所定のタイムスケジュールで一巡させてエンコーダ46の出力信号のエッジをカウントし、初期駆動終了時のエンコーダカウント値とロータの回転位置と通電相との対応関係を学習し、その後の通常駆動時に、エンコーダカウント値と初期駆動終了時の学習結果に基づいて通電相を決定する。初期駆動終了後は所定の禁止期間が経過するまで初期駆動の実行を禁止し、使用者が遊び感覚等で電源投入と切断の操作を繰り返しても、初期駆動が繰り返し実行されることを未然に防止する。初期駆動終了後、禁止期間内に電源切断操作が行われても、メインリレー51を切断せずにレンジ切換制御装置42への電源供給を継続する。
(もっと読む)
SCRシステムのポンプを制御するための方法
SCRシステムのモーター駆動ポンプを制御するための方法であって、当該ポンプは、圧力を供給し、この圧力に関連する流体力学的トルクに、そしてさらに抵抗トルクにさらされ、かつ、電流が供給されるコイルを備えかつこの電流に関連したトルクを発生させる電気モーターによって駆動され、当該方法によれば、ポンプを制御するために、モーターのコイル中の電流を測定するための手段と、モーターによって消費される全電流のレギュレータと、異なる速度での無負荷条件の下でポンプを回転させることによってかつ関連する電流を測定することによって得られた抵抗トルク(すなわち乾燥摩擦)の一部の推定を用いる電流と圧力との間の関係のモデルとが利用される。  (もっと読む)
(もっと読む)
係合識別機能を有するスタータ
本発明は、スタータ(100)と、スタータモータを始動させるための装置と、スタータピニオンの係合状態を識別するための装置と、スタータモータの始動方法と、対応するリングギヤとピニオン(101)との係合状態を識別するための方法と、コンピュータプログラムと、コンピュータプログラム製品とに関する。対応するリングギヤとピニオン(101)との係合状態、とりわけスタータ(100)のリングギヤとスタータピニオンとの係合状態を識別するための方法は、該ピニオン(101)を切り換えるためのスタータリレー(110)の通電と、該通電の少なくとも1つの通電パラメータの検出とを含み、検出された該通電パラメータと、候補となるピニオン位置との関連づけを行い、検出された該通電パラメータに対応するピニオン位置を選択することにより、該ピニオン位置を識別する。 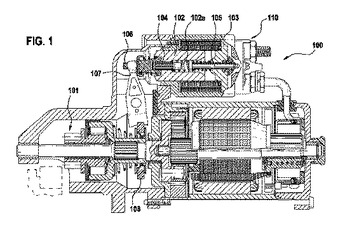 (もっと読む)
(もっと読む)
船のランプを運転する方法及び機構
【課題】電気モータによって駆動される船のランプの動作を改善した方法及び機構を提供すること。
【解決手段】電気モータ30によって駆動される船のランプ10を上端位置と下端位置の間で動作させる方法及び機構であって、ランプ10がランプの端位置の近傍にあるときに、少なくとも1つの電気モータ30の最大トルクを低減する手段40と、少なくとも1つの電気モータ30によって行われる回転数、若しくはその回転数を示す量に基づいて、又はランプの経過時間及び速度に基づいてランプ10の位置を決定する手段40と、ランプ10の決定された位置が、所定の範囲によって画定されるゾーン内にあるときにのみ、少なくとも1つの電気モータ30の最大トルクの低減を可能にする手段40とを備える、機構。
(もっと読む)
電動モータユニット
【課題】 さらに小型化、コスト低減が可能な電動モータユニットを提供する。
【解決手段】 電動モータユニットは、電動モータ2を制御する電動モータ制御装置3と主制御装置4とが、正電源線8および負電源線11で接続されており、電動モータ2に対する指令信号が主制御装置4から電動モータ制御装置3に送られ、電動モータ2の状態を表す状態信号が電動モータ制御装置3から主制御装置4に送られるようになされているものである。電動モータ制御装置3と主制御装置4が、1本の共通の信号線25で接続されて、指令信号の送受信を行う指令モードおよび状態信号の送受信を行う状態モードを交互に繰り返すことにより、上記信号線25を介して上記信号の送受信を行う。
(もっと読む)
1 - 20 / 125
[ Back to top ]