
Fターム[5H501LL02]の内容
Fターム[5H501LL02]の下位に属するFターム
TGを用いるもの (18)
セルシンを用いるもの (3)
ホール素子を用いるもの (23)
Fターム[5H501LL02]に分類される特許
1 - 20 / 27
モータ制御回路及び該回路を実装したサーボ装置
【課題】モータ駆動制御用の駆動周波数を任意に変更して所望の操作感覚でサーボ装置を操縦すること。
【解決手段】受信機20を介して送信機10から制御信号として周波数設定信号を受信すると、予め記憶した駆動周波数設定情報のうち、受信した周波数設定信号に応じた情報を選択する。また、送信機10から制御信号である操縦信号を入力すると、選択された駆動周波数設定情報に基づき、パルス幅比較部34bから差分データタイミング信号に同期して取り込んだ差分データ信号を、選択された駆動周波数に対応するように周波数変換処理する。そして、得られた差分データ変換信号を周波数処理情報に基づき所定のカウント範囲まで使用して駆動信号を生成し、駆動機構32の駆動制御を行う。
(もっと読む)
電動機のフェールセーフ装置

【課題】駆動対象物を駆動する電動機に一時的な瞬断を含む故障を検出した場合は電動機を停止させ、その電動機が停止した後に電動機に問題がないと判断した場合は、その電動機を安全に復帰させるフェールセーフ装置を提供する。
【解決手段】駆動対象物1,2,3,4を駆動する電動機5,6のフェールセーフ装置において、電動機5,6に係る故障を検出する電動機故障検出手段と、電動機を停止させる電動機停止手段と、少なくとも故障に係る電動機に駆動される駆動対象物の動作を阻止する駆動対象物ブレーキ手段と、電動機に係る故障を再度判定する電動機故障再判定手段と、電動機の始動を許可する電動機始動許可手段とを備えている。
(もっと読む)
モータ速度制御回路
【課題】外付け部品の点数を削減することが可能なモータ速度制御回路を提供する。
【解決手段】モータの回転速度に応じた速度信号に基づいて、回転速度が設定された第1回転速度より速いか否かを判定する第1判定回路と、速度信号に基づいて、回転速度が第1回転速度より高速の設定された第2回転速度より速いか否かを判定する第2判定回路と、第1及び第2判定回路の判定結果に基づいて、回転速度が第1回転速度より遅い場合、回転速度が速くなり、回転速度が第2回転速度より速い場合、回転速度が遅くなるような駆動信号を、モータを駆動する駆動回路に出力する駆動信号出力回路と、を備える。
(もっと読む)
回転角度検出装置
【課題】回転数が低い場合でも回転数の変動を抑制できるようにする。
【解決手段】制御装置60(回転角度検出装置)は、回転電機40(回転部材)の回転に伴って信号を出力するレゾルバ41と、レゾルバ41から出力される信号に基づいて検出される回転角度を示す検出角度θdの誤差を誤差補正手段65aによって補正する補正実行手段64と、補正された検出角度θdに基づいて検出回転数Nsを算出する回転数算出手段63と、検出回転数Nsが指令された指令回転数N*となるようにフィードバック制御を行う回転数フィードバック制御手段61と、検出回転数Nsおよび指令回転数N*のうちで一方または双方の回転数に基づいて補正実行手段64による補正を行うか否かを判断する補正実行判断手段62とを備える。補正実行手段64は、補正実行手段64による補正を行うと判断された場合にのみ検出角度θdの誤差を補正する。
(もっと読む)
ハイブリッド車両のレゾルバ短絡と断線感知用回路及びこれを利用したレゾルバ短絡と断線の感知方法
【課題】レゾルバのフォルト状態が断線または短絡であるかを正確に分析して把握できるようにしたハイブリッド車両のレゾルバ短絡と断線感知用回路及びこれを利用したレゾルバ短絡及び断線感知方法を提供する。
【解決手段】CPU14と連結されたRDC12の入力側に連結されるレゾルバの各出力信号端との間に断線及び短絡感知用抵抗Roを連結し、各出力信号端を介してRDC12に出力される出力信号である差動信号(S1−S3、S2−S4)より前記断線及び短絡感知用抵抗Roと電源側と出力信号端間に連結されたプルアップ抵抗Rp間の分圧による一定電圧をCPU14で測定できるようにする。
(もっと読む)
電力変換装置
【課題】従来よりも信頼性を向上させながら、かつ全体のコストを低減できる電力変換装置を提供する。
【解決手段】電力変換装置20は、第1電源E1から供給される電力を変換して発電電動機30(回転機)に出力する電力変換部21と、第1電源E1とは異なる第2電源E2によって作動するとともに少なくとも発電電動機30に備えるレゾルバ40から伝達される信号に基づいて電力変換部21を構成するスイッチング素子Q1〜Q6(スイッチング素子群)を駆動制御するコントローラ22(制御部)とを有する。コントローラ22は、電力変換部21に内蔵するとともに、信号を伝達可能な絶縁部24を介在させてレゾルバ40と接続する。レゾルバ40は発電電動機30の正確な回転位置を検出するので、従来よりは信頼性が向上する。絶縁部24は安価な素子や回路等を適用できるので、コストを低く抑えることができる。
(もっと読む)
モータ制御装置及びモータ制御方法
【課題】低速回転しているときでも低コストで安定な回転数制御を可能とするモータ制御装置及びモータ制御方法を提供する。
【解決手段】モータの回転数を制御するモータ制御装置であって、モータの回転数を周期性のある出力電圧として検出する回転数検出部と、前記出力電圧の値に基づく2以上の基準電位を保持する基準電位保持部と、前記出力電圧の連続する周期間において前記出力電圧が2以上の基準電位それぞれと同電位となるそれぞれの基準電位周期を、モータの回転数として測定する回転数測定部と、回転数測定部により検出されたモータの回転数と、モータの目標となる回転数とを比較する回転数比較器と、回転数比較器の比較結果に基づき加速度を生成する加速度指令生成部と、加速度指令生成部が生成した加速度に従ってモータを駆動することによりモータの回転数を制御するドライバーとを備える。
(もっと読む)
ハイブリッド型建設機械
【課題】連続運転を実現することにより、作業効率を向上可能なハイブリッド型建設機械を提供する。
【解決手段】ショベルでは、コントローラ30は、インバータを冷却するための冷却水の温度が出力抑制温度以上になった場合には、旋回用電動機等の交流電動機に供給される電流の上限値を小さくする制御を行う。これにより、インバータにおける温度上昇が抑制される。出力抑制温度は、インバータが交流電動機への電流の供給を停止する機構の動作を開始させる温度である運転停止温度より低いので、交流電動機が停止される前に、インバータが交流電動機に供給する電流の上限値を小さくする制御がコントローラにより実施される。これにより、交流電動機の温度異常による停止が防止され、ショベルの連続運転が実現される。
(もっと読む)
旋回駆動制御装置及びこれを含む建設機械
【課題】電動機により上部旋回体の旋回駆動を行う建設機械において、旋回速度のオーバーシュートを発生させることなく、スムーズな旋回を行い得る旋回駆動制御装置を提供すること。
【解決手段】電動機で旋回駆動される建設機械の旋回機構を駆動制御する旋回駆動制御装置は、速度指令値と旋回速度との間の偏差に基づいて、少なくとも比例成分と積分成分とを含む制御系により旋回速度を変化させるためのトルク指令値を生成するフィードバック制御部52を備え、フィードバック制御部52は、レバー26Aの操作量が零速度指令領域から左(右)方向旋回駆動領域における所定値(例えば、速度指令値の最大値の10%に対応する操作量)以上の領域に移行したことを検出した場合に、前記トルク指令値の生成に積分成分を用いないようにする。
(もっと読む)
モータ駆動システム
【課題】電圧変換装置の制御性を確保可能なモータ駆動システムを提供する。
【解決手段】モータ駆動システム100は、交流電動機M1と、交流電動機M1を駆動制御するインバータ14と、インバータ14への入力電圧VHを可変する昇降圧コンバータ12と、電圧指令値に対する入力電圧VHの偏差に応じて、入力電圧VHをフィードバック制御する制御装置30とを備える。制御装置30は、入力電圧VHの変動周波数を交流電動機M1の運転状態から推定するとともに、フィードバック制御における制御ゲインの周波数特性に照らして、推定した変動周波数での入力電圧VHの変動が大きいと予測される場合には、フィードバック制御における制御ゲイン、および交流電動機M1の駆動制御における制御応答性のいずれかを変化させる。
(もっと読む)
電動機の制御装置
【課題】負荷機械の慣性モーメントが変化する場合でも、速度制御応答を可変にしたり、外部コントローラによりトルク補償を行ったりすることなく、速度制御系の応答を一定に保持することができ、ドライブ調整内容を簡略化できる電動機の制御装置を得る。
【解決手段】理想速度ω0を出力する機械系モデル7と、速度指令SP_Ref及び理想速度ω0の偏差に基づきトルク信号τ0を出力するモデルASR8と、電動機速度ω1及び理想速度ω0の偏差に基づき補償トルク信号τ1を出力するASR9とを備える。そして、負荷機械3の慣性モーメントが変化した場合は、トルク信号τ0を出力するための速度制御ゲイン及び補償トルク信号τ1を出力するための速度制御ゲインを変更することなく、負荷追従するようにトルク補償を行う。
(もっと読む)
回転電機制御システム及び車両駆動システム
【課題】電圧変換部の故障を検出した場合に、平滑コンデンサの保護を目的としてモータとして働く回転電機が発生するトルクを制限する回転電機制御システムにおいて、例えば発進時に所要のトルクを発生することが可能な回転電機制御システムを得る。
【解決手段】直流電源、回転電機、周波数変換部、電圧変換部、トルク制限部を備えた回転電機制御システムにおいて、電圧変換部の停止を必要とする異常を検出する異常検出部を備え、当該異常検出部が異常を検出した場合に、トルク制限部が前記回転電機の回転速度が0未満の回転速度下限閾値未満の領域で正トルクの発生を制限し、正トルクを発生する領域を回転速度下限閾値以上の領域に設定する。
(もっと読む)
電流制御装置
【課題】電流指令値に対する追従性を向上させ、電源効率の良いSRモータの電流制御装置を提供する。
【解決手段】電流制御装置は、電流指令値情報、及びロータ電気角情報から鎖交磁束による誘起電圧を算出し、フィードフォワード制御に用いる情報として出力するフィードフォワード入力生成部と、ロータ電気角情報に基づいて、巻線のインダクタンスによる誘起電圧による損失を補うI制御を行う際のIゲインを出力するIゲインテーブル部と、電流指令値情報と入力される巻線電流値との偏差から可変Iゲインを用いるPI制御により算出される電圧値と、鎖交磁束による誘起電圧を示す情報からフィードフォワード制御により算出される電圧値と、を用いて電圧印加のパルス幅を算出するPWMデューティ算出部と、PWMデューティ算出部が算出するパルス幅に基づく駆動信号を生成する駆動信号生成部とを備える。
(もっと読む)
回転角度位置検出装置
【課題】レゾルバの組み込まれた機械と制御装置との互換性を向上するのに好適な回転角度位置検出装置を提供する。
【解決手段】モータ制御システム1を、レゾルバ10とレゾルバ制御装置20とを含んで構成された回転角度位置検出装置100と、モータ200と、回転角度位置検出装置100で検出された回転角度位置の情報に基づきモータ200の動作を制御する制御装置300とを含んだ構成とし、レゾルバ制御装置20を、演算装置20eと、記憶装置20fと、第1I/F回路20gと、第2I/F回路20hとを含んだ構成とし、演算装置20eによって、第1I/F回路20gを介して取得した、レゾルバ10を組み込むモータ200に関連する機械情報を記憶装置20fに記憶保持し、該機械情報を制御装置300からの取得要求に応じて第2I/F回路20hを介して制御装置300に送信するようにした。
(もっと読む)
ゲイン自動調整機能を備えたサーボモータ制御装置
【課題】本発明は、速度制御ゲインの調整を容易かつ正確に行うことができ、サーボモータの制御の信頼性を高めることができるサーボモータ制御装置を提供する。
【解決手段】速度指令値と速度検出値との差分である速度偏差に、演算定数とこの演算定数を調整するために予め設定された調整倍率との積である速度制御ゲインを掛けることによりトルク指令値を算出する速度制御部3と、トルク指令値に加算するトルク外乱6を制御系の入力値とし、トルク指令値を制御系の出力値としたときの入出力ゲインと位相遅れを推定する入出力特性推定処理部と、所定の位相遅れ量となるトルク外乱6の周波数を特定する周波数特定部と、特定した周波数での入出力ゲインを特定する入出力ゲイン特定部と、調整倍率を再設定する倍率再設定部と、を備える。
(もっと読む)
スイッチトリラクタンスモータの制御装置
【課題】回生制動を可能にしつつ、制御装置の回路構成を簡略する。
【解決手段】SRモータ3の駆動回路4は、バッテリ31に並列に接続された4つのアーム41,42,43,44を有する。各アーム41〜44は、2つのスイッチング素子が直列に接続されている。SRモータ3のコイルLu,Lv,Lwをスター結線したときの中性点47に接続される第1のアーム41のスッチング素子NH,NLの開閉は、ドライバユニット5からのゲート信号によってPWM制御される。PWM制御によって第1のアーム41の所定のスッチング素子NH,NLがOFFになったときは、回生電流が発生してバッテリ31に充電される。PWM制御によって第1のアーム41の所定のスッチング素子NH,NLがONになったときは、還流電流が流れる。PWMデューティを調整することで、コイルLu,Lv,Lwに流れる巻線電流を所定値に略維持しながら回生が行える。
(もっと読む)
モータ駆動制御装置及び画像形成装置
【課題】最終的な駆動対象の回転性能、応答特性が向上するモータ駆動制御を実現する。
【解決手段】モータの回転速度を制御するモータ駆動制御装置10であって、モータ12を回転駆動するモータドライバ11と、モータ12による出力の回転速度を検出するFGセンサ13及び補正係数算出ユニット71と、モータ12による回転駆動力で回転する感光体ドラム43の回転速度を検出するエンコーダ15及び補正係数算出ユニット71と、FGセンサ13及びエンコーダ15の出力に基づいたモータ12の回転速度と感光体ドラム43の回転速度の両速度情報を用いて算出した値に対応する速度制御信号を生成し、当該生成した速度制御信号をモータドライバ11に出力する制御部100とを備える。
(もっと読む)
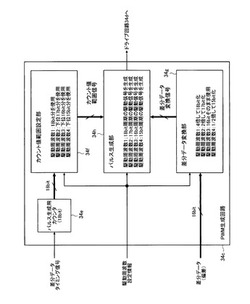
カムリミット出力装置
【課題】従来のカムリミット出力装置は、自動進角に用いる回転速度のばらつきを小さくするために、比較的長い時間の回転角度をメモリ部に蓄積させるので、速度の検出遅れが生じてしまい、起動時の制御精度が低下してしまう。
【解決手段】本発明によるカムリミット出力装置は、メモリ部として、第1所定時間分の前記回転角度5aを蓄積する第1メモリ部5Aと、前記第1所定時間より長い第2所定時間分の前記回転角度5bを蓄積する第2メモリ部5Bとを設け、シャフト2の回転開始を検出してからの所定期間は前記回転角度5aから求めた第1回転速度6aに基づいて自動進角を行い、この所定期間が終了した後は前記回転角度5bから求めた第2回転速度6bに基づいて自動進角を行う。
(もっと読む)
回転機の回転制御装置
【課題】回転機の回転制御において通常の起動時や異常発生後の再起動時等に制御を迅速に安定化させることを可能とする。
【解決手段】回転機100の回転角θに応じたレゾルバ信号を出力するレゾルバ102と、レゾルバ信号及び過去に算出された回転機100の回転角を示すデータφに基づいて、新たに回転機100の回転角を示すデータφを算出するR/Dコンバータ106と、を備える回転制御装置において、R/Dコンバータ106の電源38の電圧が所定電圧未満になった後に復帰した場合、レゾルバ信号のみに基づいてR/Dコンバータ106におけるデータφの初期値φintを算出して、その後のフィードバック制御を実行する。
(もっと読む)
スイッチトリラクタンスモータの制御装置
【課題】装置構成が複雑化することを抑制しつつ所望の目標出力を適切に確保する。
【解決手段】スイッチトリラクタンスモータ(SRモータ)の制御装置10を、SRモータ11の目標出力に応じた電流指令値を生成する電流指令値演算部51と、SRモータ11の回転速度を検出する回転速度演算部53と、目標出力および回転速度に応じてSRモータ11への通電に対する通電角および進角を設定する制御マップ記憶部55と、SRモータ11に通電される巻線電流を検出する電流検出部57と、電流指令値と巻線電流の検出値との偏差に基づき、パルス幅変調信号を生成する電流制御部58と、通電角および進角と、パルス幅変調信号とに応じて、SRモータ11への通電を順次切り換える駆動装置12とを備えて構成した。
(もっと読む)
1 - 20 / 27
[ Back to top ]