
Fターム[5H501LL13]の内容
電動機の制御一般 (20,975) | 検出変量、検出手段 (3,871) | 速度検出 (959) | センサレスで検出するもの (103) | 電気的変量の検出によるもの (82)
Fターム[5H501LL13]の下位に属するFターム
電流検出によるもの (44)
電圧検出によるもの (14)
逆起電圧検出によるもの (12)
Fターム[5H501LL13]に分類される特許
1 - 12 / 12
電動パワーステアリング装置
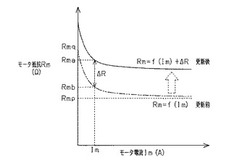
【課題】操舵系にアシスト力を付与するモータについて、実際のモータの抵抗と算出されるモータの抵抗とが乖離することを抑制することのできる電動パワーステアリング装置を提供する。
【解決手段】この電動パワーステアリング装置は、抵抗マップによりモータ抵抗Rmを算出する。モータ電流とモータ電圧とに基づいて推定誘起電圧を算出する。そして、推定誘起電圧が、電流の大きさに応じて設定される判定値以下の旨判定されるとき、モータ抵抗(推定モータ抵抗Rma)を算出し、この推定モータ抵抗Rmaに基づいて抵抗マップを更新する。
(もっと読む)
モータ制御装置及びモータ制御システム

【課題】負荷の慣性モーメントに寄らずにモータの制御における安定性を向上させつつ、モータの騒音・振動を低減することができるモータ制御装置及びモータ制御システム提供すること。
【解決手段】モータ制御装置は、制御入力Urefに応じてモータに電圧指令又は電流指令Irefを印加する電流制御部10と、モータ位置Pfbからモータ速度Vfbを算出する速度演算部6と、位置偏差に基づいて速度指令Vrefを算出する位置制御部4と、モータ速度vfbとトルク指令Trefとに基づいてモータ補正速度vh1及び速度推定値vobsとを算出する速度補償部8と、モータ補正速度と速度指令の速度偏差に基づいてトルク指令Trefを算出する速度制御部5と、モータ補正速度vh1とトルク指令Trefとに基づいて制御入力Urefを算出する外乱補償部7と、を有する。
(もっと読む)
駆動輪に連結された駆動軸に動力を入出力可能な電動機と、電動機を駆動するインバータとを備えた車両
【課題】スリップ発生時にインバータの一部のスイッチング素子がオフ状態で作動しなくなるオフ異常をより適正に判定する。
【解決手段】駆動輪の空転によるスリップが発生しているときには、インバータに印加される昇圧後電圧VHが急変したと判定され(ステップS180)、昇圧後電圧VHの変動周期がモータMG2等に印加される相電流の一周期に概ね一致すると判定され(ステップS190,S200)、且つ過変調制御モードまたは矩形波制御モードから正弦波制御モードへの切り替えが所定時間tref内に所定回数Cref以上行なわれたと判定されたときに(ステップS160)、インバータのオフ異常が生じていると判定される(ステップS170)。
(もっと読む)
交流電動機の制御システム
【課題】交流電動機へ印加される矩形波電圧の電圧位相をトルク指令値に基づいて変化させるフィードフォワード制御において、トルク補償のための電圧位相変化量を簡易な演算処理によって求めることである。
【解決手段】モータ運転状態および矩形波電圧の電圧位相に対する出力トルクの特性を示すトルク演算式に従うトルク特性線500上の現在のモータ運転状態および電圧位相(θ0)に対応する動作点Paにおける接線TLの傾きKtlが求められる。さらに、フィードフォワード制御によるトルク補償量ΔTtlを傾きKtlで除算したΔTtl/Ktlに従ってフィードフォワード制御による電圧位相変化量θffを演算する。
(もっと読む)
粘性摩擦同定装置を備えたモータ制御装置
【課題】モータ速度がノイズを多く含む場合にもノイズの粘性摩擦同定精度に与える影響を除去することができ、微小動作のみで粘性摩擦同定をすることができる粘性摩擦同定装置を備えたモータ制御装置を提供する。
【解決手段】入力指令が複数の周波数成分を含む周期信号であって、粘性摩擦同定装置107が、前記入力指令の複数の周波数成分におけるトルク指令と、前記入力指令の複数の周波数成分における前記モータ位置とに基づいて、粘性摩擦同定値を演算するものである。
(もっと読む)
モータ制御装置
【課題】コストの大幅な増加を伴うことなく、回転角検出手段の故障時に正確に推定された回転角を用いてモータを適切に駆動することができるモータ制御装置を提供する。
【解決手段】レゾルバ2に故障が生じていない通常時はレゾルバ2が検出する検出回転角θSを用いてモータ1が制御される。レゾルバ2に故障が生じたときは、回転角推定部31が演算する推定回転角θEを用いてモータ1が制御される。レゾルバ2が正常なときに、検出回転角θSから求めた回転角速度ωから検出誘起電圧ESαβが演算される。また、二相電圧指令値Vαβおよび二相検出電流Iαβに基づいて推定誘起電圧EEαβが演算される。これらの比較に基づき、推定誘起電圧EEαβを補正するための補正値Cαβが生成され、補正値記憶部30に書き込まれる。回転角推定部31は、推定誘起電圧EEαβを補正値Cαβで補正し、この補正後の推定誘起電圧を用いて推定回転角θEを求める。
(もっと読む)
モータ制御装置
【課題】電流検出からの演算時間に起因する非干渉化制御量のずれを補償して、モータ電流を良好に制御することができるモータ制御装置を提供する。
【解決手段】このモータ制御装置は、PI演算値Vdo,Vqoを演算するためのPI演算部51a,52aと、モータの非干渉化制御のための非干渉化制御量を演算するための非干渉化制御量演算部51b,52bと、モータ電流からモータの推定電圧VEd,VEqを演算する電圧推定部51c,52cと、推定電圧VEd,VEqとPI演算値Vdo,Vqoとから補正値Cd,Cqを求める補正値演算部51d,52dと、PI演算値Vdo,Vqoに非干渉化制御量Dd,Dqおよび補正値Cd,Cqを加算して電圧指令値Vd*,Vq*を出力する補正部51e,52eとを備えている。
(もっと読む)
回転電機駆動制御装置
【課題】縮退運転時の短絡電流によるモータジェネレータ駆動回路の素子故障の拡大を、より確実に防止することができるモータジェネレータ駆動制御装置の提供。
【解決手段】2つのモータジェネレータの回転数、および、それに接続された各インバータ装置の異常を、縮退運転指示部310によりそれぞれ検出する。そして、異常が検出されると、制御装置300は、異常が検出されたインバータ装置の作動を停止して、該インバータ装置に接続されたモータジェネレータが他のモータジェネレータにより連れ回される状態となるような運転指令を出力する。回転数指示部330は、連れ回されているモータジェネレータの回転数N1が所定許容回転数N1maxを超えたときに、異常でないインバータ装置に接続されたモータジェネレータの回転数N2を減少させるような運転指令(回転制御)を出力する。
(もっと読む)
モータ制御装置
【課題】磁気センサの出力信号とロータ回転位置推定演算とを組み合わせることによって、コストの削減を図りながら精度の高いロータ回転位置を得ることができ、それによって、モータの制御を適切に行うことができるモータ制御装置を提供する。
【解決手段】ホール素子20は、モータ3のロータに取り付けられた磁石の回転軸方向への漏れ磁束を検出し、ロータの回転位置に応じた信号を出力する。位置推定部21は二相検出電流Iαβおよび二相指示電圧Vαβに基づいてロータの回転位置を推定する。位置補正部30は、ホール素子20の出力信号から特定される2つの回転位置候補のうち、位置推定部21による推定結果に近い方を選択し、制御回転位置θ^として出力する。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】通電不良の発生に伴う二相駆動時のモータ回転を円滑化して安定的に高い出力性能を確保することのできるモータ制御装置及び電動パワーステアリング装置を提供すること。
【解決手段】マイコンは、所定のサンプリング周期で取得した各電流センサの出力信号に基づいて、モータの各相電流値を検出する。そして、当該二相駆動時には、検出される回転角速度ωに応じて、そのサンプリング周期を短縮化する。
(もっと読む)
モータ模擬装置、およびモータ模擬方法
【課題】電圧制御型インバータ、および電流制御型のインバータの両方に対応可能なモータ模擬装置を提供する。
【解決手段】モータ模擬運転制御部11に入力される回転速度指令ωから模擬モータの回転子角度θを算出し、被試験体のインバータ1の出力電流iu、iwと角度θを基に、d、q軸上の電流id、iqを求める。また、インバータ1の出力電圧Vu、Vwと角度θとを基に、d、q軸上の電圧Vd、Vqを求める。そして、電圧Vd、Vqと、模擬モータの電圧・電流方程式により、模擬モータに流れるべき電流を電流指令id*、iq*として求め、この電流指令id*、iq*と電流id、iqとをそれぞれ比較し、d、q軸上の電圧指令Vdo*、Vqo*を生成し、この電圧指令Vdo*、Vqo*を基に、模擬負荷用インバータ2の出力電圧の制御信号Vou*、Vov*、Vow*を生成する。
(もっと読む)
電動圧縮機の制御装置
【課題】冷却効果の高い回転数に限定して電動圧縮機を回転させることにより過電流や加熱による運転停止状態を回避すること。
【解決手段】従来から行われている電動圧縮機の回転数制御の最中において、1秒中のインバータ出力電流絶対値の最大値が、予めわかっているスイッチング素子の定格電流×0.9よりも大きくなったとき(ステップS101)、電動圧縮機の実運転回転数が、所定の回転数N1よりも小さいかどうかを判断する(ステップS102)。回転数N1よりも小さい場合は、電流余裕代が小さいので、敢えて回転数を所定回転数N3だけ上げる(ステップS103)。N1よりも大きく、かつN2よりも大きいとき(ステップS104)は、これも電流余裕代が小さくなることから、回転数を所定回転数N4だけ下げる(ステップS106)。その後に、まだ回転数制御運転を続行する必要があるかを判定する(ステップS107)。
(もっと読む)
1 - 12 / 12
[ Back to top ]