
Fターム[5H501LL42]の内容
Fターム[5H501LL42]に分類される特許
1 - 13 / 13
アクチュエータ制御装置及び方法
モータの異常診断装置
【課題】簡単な構成でモータに発生したガタ等の異常を正しく診断することができるモータの異常診断装置を提供する。
【解決手段】モータ10に駆動信号を出力するモータドライバ20と、モータの回転速度を検出する回転速度検出センサ30と、モータドライバに指令信号を出力するコントローラ22とを備え、コントローラ22は、モータの回転を周期的に変化させる異常診断指令信号を出力し、異常診断指令信号によってモータドライバを介してモータの回転が周期的に変化したときの回転速度検出センサからの回転速度検出信号を時系列的に順次取り込み、取り込まれた回転速度検出信号に基づき、異常の診断を行う。
(もっと読む)
ショベル

【課題】電動発電機の異常をより柔軟に検出可能なショベルを提供すること。
【解決手段】本発明に係るハイブリッド式ショベルは、エンジン11により発電機として駆動される電動発電機12を備えるショベルであって、電動機として機能する電動発電機12の入力を表す入力物理量を取得する入力物理量取得部300と、入力物理量取得部300が取得する入力物理量に対応する、電動機として機能する電動発電機12の出力を表す出力物理量を取得する出力物理量取得部301と、出力物理量に対する入力物理量の割合に基づいて電動発電機12の異常を検出する電動発電機異常検出部302とを備える。
(もっと読む)
建設機械
【課題】電子制御系の異常判定に係る誤判定及び検出漏れの発生を抑制できる建設機械を提供すること。
【解決手段】旋回体と、旋回体を駆動する電動モータと、操作信号を操作量及び操作方向に応じて出力する操作装置と、操作信号に基づいて生成された制御信号に基づいて電動モータを制御するインバータ装置と、電動モータの速度を検出するための位置センサと、制御信号が規定する電動モータの速度指令V*から速度Vを減じた値の符号と、電動モータの加速度の符号とが異なる状態を第1条件とし、速度指令と速度の偏差が基準値Vthより大きく、かつ、加速度が基準値βthより大きい状態を第2条件としたとき、第1条件及び第2条件のうち少なくとも一方が成立するか否かを判定する第2コントローラとを備える。
(もっと読む)
ロータ熱感受性の診断および予測
【課題】非常に早い段階で修正措置を取ることができ、修理費の著しい節約ならびに機械の利用可能性の増加につながるようなロータ熱感受性のオンライン診断を提供する。
【解決手段】第1のシステムは、電気機械のロータの熱感受性を評価するために提供され、ロータから振動データおよび界磁電流を得るためのならびに一組の動作パラメータを得るための入力システムと、振動と界磁電流との間の関係を計算するためのシステムと、関係が有意であるかどうかを決定するための評価システムと、有意な関係を決定したことに応答して熱感受性の通知を発行するためのシステム。第2のシステムは、ある期間にわたる振動と界磁電流との間の一連の関係を計算するためのシステムと、その期間にわたる一連の関係の変化が有意であるかどうかを決定するための評価システムと、一連の関係の有意な変化を決定したことに応答して熱感受性の通知を発行するためのシステム。
(もっと読む)
電動機駆動装置
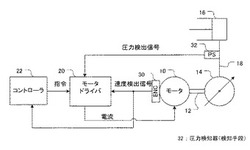
【課題】1ピストンのロータリー圧縮機のような、電動機の回転子が1回転する間の負荷トルクの変動が大きい電動機の低速領域では、モータの振動と騒音が増加し脱調耐量の悪化が顕著に発生するという課題を有していた。
【解決手段】目標回転数補正手段11を設け、トルク制御手段21で決定したトルク指令量および吐出圧力検出手段22により検出した圧力値が予め設定された値より大きい場合、目標回転数を補正することにより、低速領域を回避し、過負荷時のモータの振動と騒音の増加を抑制し、モータの脱調を防止することができ、連続して安定な運転が可能な電動機駆動装置を実現するものである。
(もっと読む)
車両駆動モータ制御装置
【課題】車両駆動モータを制御する装置において、車両駆動モータの状態および車両駆動モータが配置された環境に応じた制御を行うことを目的とする。
【解決手段】コントロールユニット16は、運転操作指令、モータ22の回転速度等に基づいて、目標とするトルク指令値を求める。そして、トルク制御マップを参照し、その回転速度およびトルク指令値の条件において、分担電圧DVが許容電圧PDを超えるか否かを判定する。コントロールユニット16は、分担電圧DVが許容電圧PD以下であるときは、そのトルク指令値に基づいて昇圧コンバータ12およびインバータ14を制御する。一方、分担電圧DVが許容電圧PDを超えるときは、コントロールユニット16は、トルク制御マップを参照し、分担電圧DVが許容電圧PD以下となるよう、昇圧コンバータ12およびインバータ14の制御によって界磁巻線に流れる電流を調整する。
(もっと読む)
省エネルギーを評価する方法及び装置
動力及びエネルギーの節約を決定する方法であって、該方法は、もうひとつ別の種類の調節機に対する、回転動力機械の回転速度調節機/速度調節機により、即ち、主要なポンプ、ファン、ターボ‐圧縮機及び撹拌機により、行われ、この場合、一定の回転速度が用いられる。第1に、省力ΔP、ΔP’、ΔP’’が決定され、経時的な積分の後、省エネルギーをもたらす。方法は、機械のシャフト速度n及びシャフト動力P1又は同率の動力は、直接的又は間接的に測定されることを特徴とし、必要とされる動力PO、PO’、PO’’は、親和力の法則から計算される。調節バルブでのスロットル調節機の間、完全な回転速度での動力P2は、他のことの中から、動力曲線kpの勾配から決定される。省力は、その後、スロットル調節機ではΔP’=P2−P1で構成され、いくつかの他の調節方法ではそれぞれΔP’=PO’−P1及びΔP’’=PO’’−P1を構成される。原動機の他に、回転速度制御設備における損失が考慮に入れられ、省力の大きさを精密化される。動力決定に必要とされるパラメータは、継続的な適応的方法を介して、作動中に測定された値から精密にされる。 (もっと読む)
始動制御装置
【課題】可変動弁機構に異常が発生した場合のエンジンの始動性を向上させる。
【解決手段】ECU70の制御部72は、クランキングを開始するときに、吸気弁140の閉タイミングを最遅角位置から下死点方向に進角させる進角量ADVを決定し、決定した進角量ADVを可変動弁機構180へ送る。クランキング開始後、進角量ADVが0より大きい場合であって、カム角センサ606から得られる吸気カム角CAMと、クランク角センサ608から得られるクランク角CRKと、を用いて検出される吸気弁140の実際の閉タイミングが、最遅角位置に対して進角していない場合に、制御部72は、可変動弁機構180に異常があると判定する。可変動弁機構180に異常があると判定すると、制御部72は、クランキングの駆動源であるモータMG1の出力トルクを増加させるようインバータ40に対して制御信号PWMを出力する。
(もっと読む)
圧縮機制御システム及び電動機制御装置並びに電動機制御方法
【課題】従来よりも信頼性の高い圧縮機が、電動機および電動機制御装置の容量を大きくする必要がない圧縮機制御システム及び電動機制御方法並びに電動機制御方法を提供する。
【解決手段】空気の取り込み口に弁を有する圧縮機60と、圧縮機60を動作させる電動機50と、電動機50の回転速度を制御し駆動する電動機制御装置10〜40とからなり、電動機制御装置は、圧縮機60内部の圧力が大気圧よりも高い条件下で電動機50を起動する際に、空気の取り込み口の弁80を開放するまでの高いモータトルクを要求される期間中、電動機50の回転速度をほぼ一定値に保持し、脱調させることなく安定に行う圧縮機制御システム。電動機制御装置は、電動機50への回転数指令値を用いて行う。
(もっと読む)
電動機の制御装置
【課題】外ロータと内ロータとの間の位相差を種々様々の要求に応じて変化させることを可能としつつ、実際の位相差に適した電動機の運転を行なうことを可能とする制御装置を提供する。
【解決手段】外ロータ3と内ロータ4との間の位相差は、作動流体(作動油)が供給される圧力室24,25の圧力P1,P2を操作することで変更可能である。圧力P1,P2を検出し、その検出値を基に、両ロータ3,4間の位相差もしくは誘起電圧定数Keなどの位相差パラメータの値を推定する。この位相差パラメータの推定値に応じて電動機1の通電電流を制御する。両ロータ3,4の相対回転を行なわせる手段30は、位相差パラメータの指令値と推定値との偏差に応じて決定される動作指令値P1_c,P2_cに応じて圧力室24,25の圧力P1,P2を操作する。
(もっと読む)
電動装置システム
【課題】電動装置を電動装置本体1と制御ユニットに分離するとともに、制御ユニットが電動装置本体を識別できるようにし、制御ユニットの共通化を図ることにより、無駄のない電動装置システムを構築すること。
【解決手段】モータを動力として作動する電動装置本体1と該電動装置本体1を制御する制御ユニット2とで電動装置システムAを構成し、上記制御ユニット2は上記電動装置本体1に着脱可能にするとともに、上記電動装置本体1を制御する制御情報を設定する設定手段29と、電動装置本体1の動作状態を検出する検出手段16の検出結果に基づいて上記電動装置本体の動作を制御する制御手段25とを備えること。
(もっと読む)
モータ駆動装置
【課題】位置制御から圧力制御への切り替え時に安定した圧力制御ができるモータ駆動装置を提供する。
【解決手段】モータ2とモータ位置31を検出するエンコーダ3を用いて、モータ位置31を位置指令112に追従させる第1のトルク指令121を計算する位置制御器12と、モータ2により駆動されるワーク4が加圧対象6に加える圧力を検知する圧力センサ5を用いて、その出力である圧力センサ値51を圧力指令113に追従させる第2のトルク指令131を計算する圧力制御器13を備えたモータ駆動装置1において、位置制御器12を用いた加圧時に、第1のトルク指令121と圧力センサ値51の比を計算し、この比が一定値で安定した時点で、圧力制御器13に制御を切り替えるシーケンス制御器11を備えたモータ駆動装置1である。
(もっと読む)
1 - 13 / 13
[ Back to top ]