
Fターム[5H501LL53]の内容
Fターム[5H501LL53]に分類される特許
41 - 60 / 114
電動機駆動装置
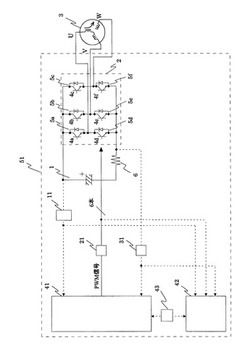
【課題】現行システムに対して必要最小限な装置を付加するだけで、装置の信頼性を低下させることなく電動機巻線抵抗の測定、電動機巻線温度測定及び電動機巻線過熱保護を行える電動機駆動装置を提供する。
【解決手段】演算処理装置CPU41により通電角度を固定し、演算処理装置CPU41からのPWM信号の時間幅を計測するとともに、電流検出素子6及び電流検出手段31の検出結果、母線電圧検出手段11によって検出された母線電圧及び前記計測したPWM時間幅に基づき電動機3の巻線抵抗を算出し、予め設定したMAPによって巻線温度を推定する演算処理装置CPU42を付加的に設けた。
(もっと読む)
電動モータの保護装置および電動式油圧ショベル

【課題】電動モータの固定子コイルの異常な温度上昇の検知精度を向上させることができる電動モータの保護装置を提供すること。
【解決手段】コントローラ44は、外気温度センサ41により検出された電動モータ11の外気温度と、コイル温度センサ42により検出された電動モータ11のコイルエンド14aの温度とに基づき電動モータ11の固定子コイル14の上昇温度Trを算出する。さらに、消費電流センサ43により検出された電動モータ11の消費電流(モータ負荷)に対応する規定上昇温度Tsを算出する。さらに、上昇温度Trが規定上昇温度Ts以上かどうかを判定し、上昇温度Trが規定上昇温度ts以上であるという判定結果を得たときに、報知装置48を制御して注意警報表示灯48bを点灯させる。
(もっと読む)
車載電子制御装置及び操舵制御システム
【課題】電動機20とインバータIVとの間の断線と電動機20の2相の短絡とが同時に生じる異常と、断線のみの異常との区別ができないこと。
【解決手段】電動機20の1相は、抵抗体50を介してプルアップされている。インバータIVが停止されている状態で、インバータIVの各相の電圧に基づき、インバータIV及び電動機20間の断線検出を行う。断線がある場合、断線していない残りの2相に通電処理し、その際の電動機20の電気角(回転角度θe)の収束値に基づき、短絡異常が同時に生じているか否かを判断する。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】通電不良の発生に伴う二相駆動時のモータ回転を円滑化して安定的に高い出力性能を確保することのできるモータ制御装置及び電動パワーステアリング装置を提供すること。
【解決手段】マイコンは、所定のサンプリング周期で取得した各電流センサの出力信号に基づいて、モータの各相電流値を検出する。そして、当該二相駆動時には、検出される回転角速度ωに応じて、そのサンプリング周期を短縮化する。
(もっと読む)
電動機制御装置および電動機の制御方法
【課題】電動機の制御における信頼性を向上する技術を提供する。
【解決手段】電動機制御装置90は、同じ回転軸を駆動する複数の入力系統36、37を備えるモータ38と、複数の入力系統36、37のそれぞれを流れる電流を制御するEPS−ECU32と、電流を検出する第1の電流センサ44および第2の電流センサ46と、入力系統36、37に流れる電流を遮断する第1のリレー48および第2のリレー50と、を備える。EPS−ECU32は、第1の電流センサ44および第2の電流センサ46が検出した電流値に基づいて入力系統36と入力系統37との間が短絡していると判定した場合、入力系統37に流れる電流を遮断するように第2のリレー50を制御する。
(もっと読む)
外部線束密度を測定することによる電気機械の非侵襲的監視及び診断
【課題】電気機械を監視するシステム及び方法を提供すること。
【解決手段】電気機械(105)の外部にある1つ又はそれ以上のポイントにおいて、電気機械(105)に関連する磁界(400)が測定され、それぞれの磁界値は1つ又はそれ以上のポイントの各々に関連付けられる。1つ又はそれ以上の磁界値は、1つ又はそれ以上の対応する期待値と比較され、この比較に少なくとも部分的に基づいて、電気機械(105)内に故障が存在するかどうかが判定される。
(もっと読む)
SRモータ駆動装置
【課題】SRモータの各相巻線の断線故障とグランド短絡故障とを、簡単な構成で区別して検出する。
【解決手段】Y結線の接続点YPに電源電圧VBが供給されるSRモータ1の各相巻線3u,3v,3wについて、それの端部が接続される接続端子5と駆動トランジスタ15とを備えたSRモータ駆動装置20では、各接続端子5に一端が接続された抵抗R1の他端とグランド電位との間にプルダウン抵抗R2が接続されており、更に上記抵抗R1の他端には、ダイオードD1を介してプルアップ抵抗R3が接続されている。そして、マイコン11は、各相巻線3について、駆動トランジスタ15をオフしている時に、抵抗R1,R2の接続点の電圧VMをモニタし、その電圧VMが正常判定値より低ければ異常と判定して、プルアップ抵抗R3にプルアップ用電圧VPを印加し、その状態での電圧VMに基づいて、巻線3の故障が断線とグランド短絡との何れであるかを判別する。
(もっと読む)
サーボモータの制御方法およびその制御装置
【課題】サーボモータの運転開始時に、電気角が正しくない場合にはテストモードによる指令によって暴走動作を誘発させて、より小さい回転角でサーボモータの暴走を停止すること。
【解決手段】サーボモータ10の運転開始時に、サーボモータ10の通常運転モードに先立って、テストモードによってサーボモータ10をサーボオン状態とし、サーボオン直後から一定時間、ユーザからの回転指令を受付けないサーボロック状態として、暴走テスト用パルス発生器12からの微小パルスをスイッチ18を介して取り込み、この微小パルスによる回転指令と位置検出器24との差から位置偏差を求め、この位置偏差が暴走しきい値以上のときには位置制御器22からサーボモータ10のコイルに対する励磁を中止する。
(もっと読む)
モータ制御装置
【課題】複数組の駆動巻線を持つモータの大形機械への接続状態を配線変更することなく切換え、異常検出の運転パタンより配線異常を検出し、モータの暴走を防止することのできる制御装置を提供する。
【解決手段】モータ制御装置に電流レベル設定回路と励磁位相設定回路を有する誤配線検出装置を設け、誤配線検出モードに切換えて、誤配線検出用の所定の運転指令パタンでモータを電流制御運転することにより、モータの現在位置の変化や駆動巻線に流れる電流レベルから駆動巻線の配線状態を確認する。
(もっと読む)
モータの異常検出装置
【課題】過電流検知付モータのロック状態やオープン状態の異常状態を検知し、運転停止できるとともに、異常状態を容易にユーザに報知する。
【解決手段】過電流防止回路付モータ11と、前記過電流防止回路付モータ11を制御する制御部12を備え、制御部12は、過電流防止回路付モータ11に流れる電流を検知する電流検知手段14を備え、電圧を過電流防止回路付モータ11に印加した状態で所定時間毎に流れる電流の最大値、最小値を検知記憶し、所定時間毎の過電流防止回路付モータ11に流れる電流の最大値、最小値の変動幅が制御部12に設定された閾値と比較し、大きい状態が一定周期以上である場合に、異常であると判断を行い、過電流防止回路付モータ11を停止し、異常報知手段21を介してユーザに報知する。
(もっと読む)
電動機制御装置およびそれを用いた空気調和機
【課題】シンプルで低コストな回路構成で、電動機の欠相を検出すること。
【解決手段】電動機4の電流検出手段6と、前記電流検出手段6によって検出した電流値と電流基準値12とを比較し回転異常を判定する回転異常判定手段18と、前記回転異常判定手段11にて回転異常と判定した時前記電動機4の動作を停止させる保護動作手段14を備えるマイクロコンピュータで構成し、電動機4始動時より第1の所定時間経過後、前記回転異常判定手段18による回転異常判定が第2の所定時間継続した場合に、電動機4の欠相と判断し電動機4の動作を停止させることが可能となる。
(もっと読む)
シフト切替装置
【課題】短絡検出用のセンサ等の部品を追加することなく、モータの故障が短絡故障または断線故障のいずれの故障であるのかを判定できるようにする。
【解決手段】モータ101が断線・短絡故障したときに、断線・短絡検出を行って故障相を判定し、その故障相以外の正常相の巻線113に通電を行ってモータ101の作動を試みる。この通電制御により、モータ101が作動したときには断線故障と判定し、モータ101が作動しないときには短絡故障と判定する。そして、モータ101の故障が断線故障である場合、モータ101を回転させることが可能であるので、モータ駆動によるシフトレンジの切り替えを継続する。一方、モータ101の故障が短絡故障である場合、モータリレー230をOFFにして駆動コイル110とバッテリ電圧Vbとの接続を遮断することで、モータ101の故障相に過電流が流れることを防止する。
(もっと読む)
ポンプ検査装置
【課題】ポンプの駆動に関する制約を順守しつつ、製品に組み込んだ状態のDCポンプの良否を容易に検査するDCポンプ検査装置を得ること。
【解決手段】ポンプ検査装置が、水回路30へ注水しないでDCポンプ20を駆動させる際に制限されるポンプの駆動条件範囲内でDCポンプ20を駆動させるとともに、DCポンプ20を駆動させる指示電圧を増加させながら指示電圧をDCポンプ20へ印加し、DCポンプ20のポンプ回転率に基づいてDCポンプ20が異常であるか、正常であるかを判断する制御部1を備え、制御部1は、駆動条件範囲に含まれるポンプ回転率に関する制限範囲内でDCポンプ20が駆動するようDCポンプ20に指示電圧を印加するとともに、駆動制限時間内に所定値以上のポンプ回転率を検出できない場合にDCポンプ20は結線漏れや不良品による異常であると判断する。
(もっと読む)
送りモータのロック検出装置
【課題】本発明は、部品コストの上昇やセット基板の大型化を招くことなく、送りモータが駆動状態であるか非駆動状態であるかを検出することが可能なロック検出装置を提供することを目的とする。
【解決手段】本発明に係る送りモータのロック検出装置は、送りモータMの逆起電圧を検出し、その大きさに基づいて送りモータMが駆動状態であるか非駆動状態であるかを判定する構成とされている。
(もっと読む)
モータの過負荷検出方法及びその装置
【課題】従来のモータの過負荷検出方法及びその装置では、銅損のみに基づいてモータの過負荷検出が行われるので、風損等の機械損と鉄損とを含む回転損が過負荷検出に考慮されておらず、モータの過負荷を正しく検出できず、モータを十分に保護できなかった。
【解決手段】本発明によるモータの過負荷検出方法及びその装置は、過負荷検出部4が、電流検出部2によって検出された供給電流2aの平均値を定格電流で除算することで銅損予測値を求めるとともに、回転速度検出部3によって検出された回転速度3aの平均値を定格回転速度で除算することで回転損予測値を求め、前記銅損予測値と前記回転損予測値との合計が所定値を超えたと判定した場合に前記モータの過負荷を検出する構成である。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】通電不良相発生時におけるトルクリップルの発生を抑制することのできるモータ制御装置を提供すること。
【解決手段】マイコン17は、モータ12の何れかの相に通電不良が発生した場合に該異常の発生を検出可能な異常判定部31を備え、該異常が検出された場合には、当該通電不良発生相以外の二相を通電相としてモータ制御信号を出力する。そして、このとき、マイコン17は、当該通電不良発生相に応じた所定の回転角を除いて、要求トルク、即ちモータトルクの制御目標値に対応するモータ電流が発生するようなモータ制御信号を生成する。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】通電不良相発生に伴う二相駆動時においても制御系の異常検出が可能なモータ制御装置を提供すること。
【解決手段】異常判定部は、二相駆動時には、該二相駆動の実行により生ずるq軸電流値Iqの変動に対応すべく、二相駆動における非通電相(二相駆動の原因となった通電不良発生相)及び回転角θに基づいて、異常判定に用いる閾値を変化させる。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】通電不良相発生時におけるトルクリップルの発生を抑制することのできるモータ制御装置を提供すること。
【解決手段】マイコン17は、d軸電流指令値Id*及びq軸電流指令値Iq*を演算する電流指令値演算部23と、これらd軸電流指令値Id*及びq軸電流指令値Iq*に基づいてd/q座標系におけるフィードバック制御を実行することによりモータ制御信号を生成するモータ制御信号生成部24とを備える。また、マイコン17は、モータ12の何れかの相に通電不良が発生した場合に該異常の発生を検出可能な異常判定部31を備え、該異常が検出された場合には、当該通電不良発生相以外の二相を通電相としてモータ制御信号の生成を実行する。そして、このとき、マイコン17は、当該通電不良発生相に応じた所定の回転角を除いて、q軸電流指令値Iq*に対応したq軸電流値Iqが発生するようにd軸電流指令値Id*を演算する。
(もっと読む)
異常診断装置、画像形成装置およびプログラム
【課題】製造コストを上昇させずに、モータやモータに接続された負荷(例えば、トナー補給機構など)の劣化や異常発生を早急に検知し、二次的な破損が発生する前にモータを停止させることができる異常診断装置を提供する。
【解決手段】モータMの起動時に、回転速度のフィードバック制御を行うための回転速度検出部21から出力される回転速度検出信号を用いてモータMの回転速度(モータMの駆動にかかる制御信号のパルス幅)を基に異常診断部25で異常診断を行うようにする。これにより、モータMの起動時において、モータMやモータMに接続された負荷の劣化や異常発生による負荷トルクの変動があった場合におけるわずかな劣化や異常発生を検知することができるようになるので、モータMの回転開始直後に異常発生判定を行うことができ、二次的な破損が発生する前にモータMを停止させることができる。
(もっと読む)
故障検知装置及び故障検知プログラム
【課題】特別のモードに移行することなく、かつ故障診断時期が特定されることなく、各駆動機構の駆動電流の総和によって故障を判断する際に、専用の接続手段を必要とせず、汎用性を持たせる。
【解決手段】故障検知に必要な実動電流波形の取り込み時期を、専用のインターフェースを用いて制御部100等から認識しなくても、例えば、ユーザーインターフェースの操作指示を起点として、実動電流波形の開始時期よりも前、かつ終了時期よりも後までの時間範囲で電流波形を取り込み、その後、正常電流波形との一致度合いを示す相互相関係数rを演算することによって、正常電流波形と実動電流波形との同期をとることができ、精度の高い故障検知機能に、さらに汎用性を持たせることができる。
(もっと読む)
41 - 60 / 114
[ Back to top ]