
Fターム[5H505LL31]の内容
交流電動機の制御一般 (51,584) | 検出変量、検出手段 (8,979) | 磁気的変量の検出(磁束、磁界) (132)
Fターム[5H505LL31]の下位に属するFターム
Fターム[5H505LL31]に分類される特許
1 - 11 / 11
空気調和機
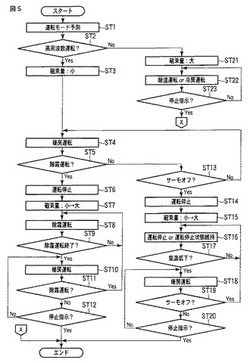
【課題】磁束量を数段階に可変可能な永久磁石電動機を用いて、断続運転することなく、高効率、且つ、高能力な運転が可能な空気調和機を提供する。
【解決手段】空気調和機100は、磁束量を可変可能な永久磁石電動機16を有する密閉型圧縮機1と、室内熱交換器3と、膨張装置4と、室外熱交換器5と、室温検出器7と、外気温検出器8と、制御部9と、を備え、制御部9により、空気調和機100の運転において、空調負荷が大きいと判断されたときに、永久磁石電動機16の磁束量を小さくする構成とする。
(もっと読む)
回転電機装置及びその制御装置

【課題】
モータジェネレータの制御性をこれまで以上に向上できるモータジェネレータ駆動システム及びその制御装置の提供を課題とする。
【解決手段】
上記課題は、モータジェネレータ200に入出力される電力を制御するインバータ装置300のスイッチング半導体素子のスイッチング動作をスイッチング指令に基づいて制御するにあたり、スイッチング指令を生成するスイッチングパターンデータの取得に必要な参照パラメータを決定するためのデータが蓄積されたモード状態量テーブルを、モータジェネレータ200の各動作モード毎に個別に設定し、モータジェネレータ200の各動作モード毎に、モード状態量テーブルから取得したデータを基に、スイッチング指令を生成する、ことにより解決できる。
(もっと読む)
誘導電動機駆動装置
【課題】誘導電動機を静止させた状態で磁気飽和特性を同定できる誘導電動機駆動装置を提供することにある。
【解決手段】直流電源3から供給された直流電力を交流電力に変換して誘導電動機4を駆動するインバータ1を有する誘導電動機駆動装置において、インバータ1から直流電圧を誘導電動機4に印加し、磁束推定部15において、誘導電動機4に流れるD軸電流Idの整定後のD軸電流最終値IdFを記憶し、誘導電動機4に流れるD軸電流Idの時系列データId[κ]を記憶し、D軸電流最終値IdF及びD軸電流Idの時系列データId[κ]に基いて、推定磁束量φhを演算し、磁気飽和特性演算部16により磁気飽和特性により磁気飽和特性を同定する誘導電動機駆動装置。
(もっと読む)
永久磁石形同期電動機の制御装置
【課題】永久磁石形同期電動機の端子電圧を電力変換器の最大出力電圧に制御した時にも、安定な電流制御と高精度なトルク制御を可能にする。
【解決手段】入力電圧検出器12と、電圧制限値演算器22と、電圧振幅演算器21と、電流指令演算部18と、電流調節器20a,20bとを有し、電流指令演算部18は、トルク指令値から第1の磁束指令値を演算する磁束指令演算器111と、電圧制限値と電圧指令値振幅との偏差から磁束補正値を演算する磁束調節器122と、第1の磁束指令値と磁束補正値とを加算して第2の磁束指令値を演算する加算器124と、電流指令値からトルクを演算するトルク演算器134と、トルク指令値とトルク演算値との偏差から負荷角指令値を演算する負荷角調節器132と、第2の磁束指令値と負荷角指令値とから電流指令値を演算する電流指令生成器133と、を備える。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】通電不良の発生に伴う二相駆動時におけるモータの回転を円滑化して高い出力性能を確保することのできるモータ制御装置を提供すること。
【解決手段】マイコン17は、何れかの相に通電不良が発生した場合には、当該通電不良発生相以外の二相を通電相として、該各通電相に、その通電不良発生相に応じた所定の回転角を漸近線として正割曲線又は余割曲線状に変化する相電流を発生させるべく電流制御を実行することにより、そのモータ制御信号の出力を継続する。また、マイコン17は、入力されるモータの回転角θを補正(オフセット)可能な回転角補正制御部40を備える。そして、上記通電不良発生相以外の二相を通電相とする二相駆動時には、その電流制御における電流指令値としての相電流指令値Ix*と実電流値である相電流値Ixとの間の位相のずれを補償すべく、当該電流制御の基礎となる回転角θを補正する。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】通電不良相発生に伴う二相駆動時におけるトルクリップルの発生を効果的に抑制しつつ、高精度の異常検出を可能とするモータ制御装置を提供することにある。
【解決手段】マイコンは、通電不良相の発生時、所定の回転角θA,θBを漸近線として正接曲線状に変化するd軸電流指令値Id*を演算し、当該d軸電流指令値Id*に基づく電流フィードバック制御を実行することにより、通電不良相以外の二相を通電相としてモータ制御信号の出力を続行する。そして、その二相駆動時において、各相に設定された通電可能な最大値に基づいてその相電流値を制限すべき回転角度範囲内、即ち電流制限範囲内(θ1<θ<θ2,θ3<θ<θ4)にある場合には、当該各通電相の相電流値が上記最大値で一定となるように、d軸電流指令値Id*及びq軸電流指令値Iq*を演算する。
(もっと読む)
モータ制御装置および洗濯機
【課題】モータを高効率で運転すること。
【解決手段】鉄損算出部56および銅損算出部57は、それぞれモータ15の鉄損Piおよび銅損Pcを算出する。加算器59は、鉄損Piと銅損Pcを加算してモータ15の総損失Pallを出力し、遅延器60は、その総損失Pallを1制御周期だけ遅延させる。減算器61は、現制御周期で算出した総損失Pallから前制御周期で算出した総損失Pall0を減算し、PI制御器62は、その変化分ΔPallと直前の指令d軸電流Idrefpreの変化符号とに基づいて比例積分演算を行い、指令d軸電流Idrefpreを出力する。この指令d軸電流Idrefpreは、リミッタ63を介してd軸電流Idrefとして出力される。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】運転可能な回転速度領域が広く且つ通電不良相発生時の非通常制御においてもモータの逆回転が生じないモータ制御装置及び電動パワーステアリング装置を提供すること。
【解決手段】マイコン(電流指令値演算部)は、モータの回転角速度ωに応じてd軸電流指令値Id*を負の値とする弱め界磁制御を実行する。また、マイコンは、EPSにおける異常判定を実行し、該異常判定において、電力供給系統の異常が発生したと判定した場合(ステップ202:YES)には、当該電力供給系統の異常が、通電不良相の発生であるか否かを判定する(ステップ203)。そして、通電不良相が発生したと判定した場合には、上記弱め界磁制御を停止(禁止)して、当該通電不良相以外の残る二相を通電相とするモータ制御信号の出力を実行する(二相駆動モード、ステップ204)。
(もっと読む)
モータ制御方法及び装置
【課題】モータやコントロールユニット(ECU)の製造のバラツキや環境の変化が生じても、モータ印加電圧の飽和(デューティ100%)によるモータ異音がなく、電動パワーステアリング装置にも適用することができ、また、モータ最大出力を発生することができるモータ制御方法及び装置を提供する。
【解決手段】PWMのモータ駆動電圧指令値によってモータを駆動するモータ駆動方法において、前記モータの駆動電圧飽和度を演算し、前記駆動電圧飽和度に基づいてモータ電流指令制限値を補正する。
(もっと読む)
エレベータの制御装置
【課題】電流検出器の残量磁束による検出誤差をなくし、常に正確な電流検出にて高精度な速度制御を行う。
【解決手段】インバータ装置104から電動機106に供給される電流を電流検出器105A,105Bにて検出する。制御装置110は、この電流検出器105A,105Bによって検出された電流値に基づいてインバータ装置104を駆動制御する。その際、制御装置110は、例えばエレベータが目的階で停止する毎に電流検出器105A,105Bに消磁用の電流を短時間通電してリセット状態に戻す。これにより、残量磁束による検出誤差をなくし、常に正確な電流検出にて高精度な速度制御を行うことができる。
(もっと読む)
インバータ装置およびモータの制御装置
【課題】車両の走行中および走行停止中に拘わらずに、走行駆動用モータおよび車両用補機の両方に対して適切に通電制御を実行する。
【解決手段】モータECU14は、トリプルブリッジインバータ回路を具備するインバータ回路10aに対するゲート信号をパルス幅変調により生成する際に用いるキャリア信号の1周期(キャリア周期Ts)を、少なくとも2つ以上の駆動期間に時分割し、時系列上で隣り合う適宜の駆動期間T1、T2の一方を第1モータ11の駆動期間とし、他方を第2モータ12の駆動期間として設定し、第1モータ11に対する通電制御と第2モータ12に対する通電制御とをキャリア周期Ts内で交互に実行する。
(もっと読む)
1 - 11 / 11
[ Back to top ]