
Fターム[5H540EE11]の内容
Fターム[5H540EE11]に分類される特許
1 - 9 / 9
電気負荷装置の診断装置
【課題】 電気負荷装置(ソレノイド)の地絡等の故障を確実に診断する。
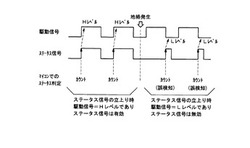
【解決手段】 制御装置(マイコン)から駆動回路への駆動信号と、駆動回路の出力状態に応じたステータス信号とを比較する。具体的には、ステータス信号の立ち上がり時に、駆動信号のレベルを判定し、例えばHレベルで整合性があれば、ステータス信号は有効と判断し、ステータス信号のカウントにより正常と診断する。ソレノイドの地絡故障を生じた場合は、駆動回路の出力が固定され、ステータス信号は発生しなくなる。また、仮に擬似的信号を発生したとしても、その立ち上がり時の駆動信号のレベルを判定し、Hレベルでなければ、ステータス信号は無効と判定する。それゆえ、誤診断を防止できる。
(もっと読む)
リニア振動モータの駆動制御回路

【課題】リニア振動モータがどのような状態であっても、その固有振動数にできるだけ近い周波数で駆動する。
【解決手段】駆動信号生成部10は、コイルL1に正電流と負電流とを非通電期間を挟んで交互に流すための駆動信号を生成する。駆動部20は、駆動信号生成部10により生成された駆動信号に応じた駆動電流を生成し、コイルL1に供給する。誘起電圧検出部30は、非通電期間において、コイルL1に発生する誘起電圧を検出する。ゼロクロス検出部40は、誘起電圧検出部30により検出された誘起電圧のゼロクロスを検出する。駆動信号生成部10は、ゼロクロスの検出位置からリニア振動モータ200の固有振動数を推定し、駆動信号の周波数を、当該固有振動数に近づける。
(もっと読む)
移動装置
【課題】非常時であっても確実に可動部を停止させることができるとともに装置に損傷を与えること防止する移動装置を提供する。
【解決手段】搬送装置10は、可動部としてのリニアステージ12を移動させるリニア搬送部11と、電力の供給を受けてリニア搬送部11を駆動する駆動手段としてのサーボドライバ13と、サーボドライバ13に電力を供給する電力供給手段としての電力装置14と、強制停止指示が入力される強制停止入力部16と、前記強制停止指示の入力に応じてサーボドライバ13の駆動状態を制御し、リニアステージ12を停止させる制御コンピュータ19と、前記強制停止指示の入力に応じて、前記入力から所定時間の経過後に、サーボドライバ13への電力の供給を停止する電力遮断部32とを備えたことを特徴とする。
(もっと読む)
デバイス搬送装置
【課題】 非常停止スイッチを押すだけで、リニアモータのブレーキ停止をした後に、交流主電源につながる全ての電力を自動的に遮断する機能のある非常停止回路を備えたデバイス搬送装置を提供する。
【解決手段】 第1の遮断器22を介して制御用DC電源5と第2の遮断器91を介した搬送用モータ11とが交流主電源により駆動され、制御用DC電源5により駆動される第1のタイマ8は非常停止スイッチ7の押下により計時を開始し、第1の所定時間経過後にその接点出力に基づいて第2の遮断器91をオフにするデバイス搬送装置において、制御用DC電源5により駆動され、第1のタイマ8の接点出力に基づいて計時を開始し、第2の所定時間経過後に発生する接点出力により第1の遮断器22をオフにする第2のタイマ13を備えたことを特徴とする。
(もっと読む)
ソレノイドを制御する装置および方法
【課題】ソレノイド(22)の動作を制御するための装置(1、50)および方法(400、500、600)を提供する。
【解決手段】ソレノイド(22)の動作を制御するための装置(1、50)および方法(400、500、600)は、所定の状態に応答して活動化信号(14’)を受け取るように構成された制御回路(1、50)を含む。制御回路は、前記活動化信号に応答して、第1の所定の期間、ソレノイドに第1の付勢信号を供給し、第2の所定の期間、第1の付勢信号を切断する。制御回路はさらに、第3の所定の期間、ソレノイドに第2の付勢信号を供給する。
(もっと読む)
交流電力生成装置およびスターリング冷凍機
【課題】消費電力を低減し、かつ装置故障を防ぐことが可能な交流電力生成装置およびスターリング冷凍機を提供する。
【解決手段】交流電力生成装置100は、入力交流電圧を直流電圧に変換し、入力交流電圧を第1の変換倍率に基づいて直流電圧に変換するか、入力交流電圧を第1の変換倍率より大きい第2の変換倍率に基づいて直流電圧に変換するかを切り替える整流回路1と、整流回路1で変換された直流電圧を交流電圧に変換するインバータ回路2と、インバータ回路2で変換された交流電圧に基づいて駆動されるリニアモータMと、整流回路1を制御する制御回路3とを備え、制御回路3は、整流回路1の変換倍率を第2の変換倍率から第1の変換倍率に切り替えた時点から所定期間経過前に整流回路1の変換倍率を第2の変換倍率に切り替えた場合、所定期間経過前は第2の変換倍率から第1の変換倍率への切り替えを行なわない。
(もっと読む)
搬送装置、画像読取装置、及び画像形成装置
【課題】位置を検出するエンコーダから出力される90度位相差を持った位置信号の各位相差間の誤差を低減して、位置検出や速度制御を高精度で行う搬送装置を提供する。
【解決手段】直線上を往復搬送するリニアモータ2の位置をロータリーエンコーダREにより検出し、フィードバック制御により制御する搬送装置1において、ロータリーエンコーダREから出力される90度の位相差を持った位置信号の各位相差間の誤差を低減する位置補正・速度検出部47を備えた。
(もっと読む)
リニア同期電動機の制御方法及び装置
【課題】 同期電動機1の磁極位置の推定処理とブレーキ18の開放タイミングを合わせ、推定処理の誤動作や、可動子6の暴走(垂直駆動では落下)を防止する。
【解決手段】 垂直方向に設置されたリニアモータ1での、磁極位置推定処理の開始タイミングを、ブレーキ開放指令後、所定時間だけ遅らせる。例えば、(1)ASR制御系21の推力指令値T*が所定値Trまで増加したこと、(2)可動子6の移動(落下)距離θM、(3)又は可動子6の移動(落下)速度ωMからブレーキの釈放状態を検出し、さらに所定時間後に磁極位置の推定処理を開始させる。
(もっと読む)
リニア直流モータの過熱防止方法
【課題】可動子が移動している場合のみならず、可動子が移動していないにも拘らず高い通電率で通電される不具合発生時の異常発熱時にも対処できるリニア直流モータの過熱防止方法を提供する。
【解決手段】。可動子2の移動が無い場合は、フローチャートのステップS55に示すように、PWM値60%の通電が20秒を超えた段階で通電が停止される。また、可動子2の移動が有る場合は、ステップS50に示すように、これまで積算されたPWM時間積分値が設定値を超えた段階で通電が停止される。この通電停止の際の薄型コイル5の発熱温度は、何れも実験により90〜105℃であることが確認されている。従って、温度ヒューズ6の溶断温度120〜125℃よりも低い。
(もっと読む)
1 - 9 / 9
[ Back to top ]