
Fターム[5H540FA11]の内容
Fターム[5H540FA11]の下位に属するFターム
位置検出器を用いるもの (91)
位置検出器を用いないで検出するもの (8)
Fターム[5H540FA11]に分類される特許
1 - 8 / 8
モータ制御装置、モータ制御方法、及び制御プログラム
【課題】位置制御ゲインを切り替える際の位置偏差を低減させ、整定時間を短縮する。
【解決手段】モータ制御装置は、モータを用いて対象物を目標位置に移動させる際に用いる加速度指令値を時系列に示す加速度パターンを生成し、生成した加速度パターンに対して、モータの応答特性に応じてモータの駆動速度を減速する期間を延ばす変更をし、変更した加速度パターンから位置指令値を出力する指令生成部と、指令生成部が出力する位置指令値と、対象物の目標位置との位置偏差に対する比例制御を用いてモータを駆動するとともに、対象物が目標位置の近傍に達したときに比例制御における比例制御ゲインを現在値より大きい値に変更する制御部とを具備する。
(もっと読む)
リニアモータのドライブシステム

【課題】 コントローラ及びドライバに特別な機能を付加せずにサーボゲインの切り替えを行うことができるリニアモータのドライブシステムを提供する。
【解決手段】 3相コイルを有する可動子を備えたリニアモータ2に正弦波状の駆動電流を供給する駆動部4とこの駆動部にフィードバック制御系を構成する制御信号を出力する制御部5を含むドライバ3に、位置指令を出力するコントローラ10を接続し、第1サーボゲインで可動子を目標位置に向って移動させ、可動子が目標位置に近づいたときに第2サーボゲイン(<第1サーボゲイン)に切り替えることにより可動子を停止させるリニアモータのドライブシステムにおいて、ドライバ3に内蔵したメモリに可動子が停止する直前に第2サーボゲインに切り替えるプログラムを格納し、可動子の停止直前にこのプログラムを実行することにより、可動子を停止させる。
(もっと読む)
移動体システム
【課題】走行ルートに対する移動体の座標を既存のセンサで求めることにより、各ゾーンに複数台の移動体を走行させることができるようにする。
【解決手段】走行ルートに沿ってリニアモータの1次側コイルを配列すると共に、移動体にリニアモータの2次側を設ける。走行ルートを複数のゾーンに分割して、各ゾーンのゾーンコントローラによりゾーン内のリニアモータのコイルを制御する。コイルのリニアスケールからのリニアスケールを基準とする移動体の座標を、走行ルートを基準とする座標に変換する。
【効果】移動体の位置を走行ルートを基準に表現すると、移動体間の距離を求めることができ、1ゾーンに複数台の移動体を走行させることができる。
(もっと読む)
電磁推進及び誘導システムの整流
モータの整流方法には調整電気角、および整流方程式の共通セットにおける調整電気角の使用が含まれ、それによって整流方程式の共通セットがモータの中で1次元と2次元力の両方を生成することが可能になる。  (もっと読む)
(もっと読む)
リニアアクチュエータ
【課題】 ヨーイング角度を規定値内に抑えた状態で、姿勢制御に要する駆動電流値を最小とすることができるリニアアクチュエータを実現する。
【解決手段】 夫々に位置検出手段を備えた一対のリニアモータを所定距離を隔てて平行に配置し、前記リニアモータのスライダ間をアーム部材で結合したリニアアクチュエータにおいて、
前記一対の位置検出手段の出力の和に基づき、前記スライダ間の中点位置信号を算出する中点位置検出手段と、
前記一対の位置検出手段の出力の差に基づき、前記スライダ間の姿勢位置信号を算出する姿勢位置検出手段と、
前記中点位置信号と位置指令信号との偏差に基づく推力指令により前記スライダを駆動する駆動電流値を操作する中点位置制御部と、
制御された中点位置における最適な姿勢目標値信号を生成する姿勢目標値生成部と、
前記姿勢位置信号と前記姿勢目標値信号との偏差を演算した補正信号を利用して前記推力指令を補正する姿勢制御部と、
を備える。
(もっと読む)
被制御モータを有するリソグラフィ装置、並びにモータ制御システム及び方法
【課題】リソグラフィ装置の位置決めするためのモータ制御システムにおいて、永久磁石の温度変化によって生じるモータ定数の変化を補償すること。
【解決手段】位置決めシステムはパターニング支持体および基板支持体を位置決めする。この位置決めシステムは、ステータと支持体に連結されたムーバとを備えるモータと、モータに印加される電流を制御するための出力を提供するコントローラを備えたモータ制御システムとを有する。モータ制御システムは、ムーバおよび関連支持体の重量を補償するのに必要なコントローラ出力を決定し、このコントローラ出力の、ムーバおよび関連支持体にかかる重力を補償するのに必要な出力からの偏差を決定し、この偏差に基づいてモータに印加される電流を補正する。
(もっと読む)
自動ドア
【課題】ドアを開端位置若しくは閉端位置に保持できる構成が簡単な自動ドアを提供する。
【解決手段】ドア2を開端位置OP若しくは閉端位置CPに保持するために、リニアモータ3の可動子5を構成する永久磁石ブロック12に対して、永久磁石23を非接触状態でリニアモータ3のアウターレール6内に位置させる。該永久磁石23と永久磁石ブロック12の最端部との間の吸引力により、ドア2を開端位置OP若しくは閉端位置CPに保持できる。従って、リニアモータ3が水平でなく、閉端位置CP若しくは開端位置OP側が下がった状態で取り付けられても、ドア2の自重により閉端位置CP若しくは開端位置OPから移動してしまうことがない。また、可動子5の永久磁石ブロック12を利用することにより、従来のもののように、ドア2とドア枠等の固定側にそれぞれ吸着部及び被吸着部を設ける必要がなく構成を簡略化できる。
(もっと読む)
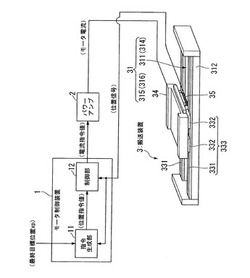
移動体制御装置及び移動体制御方法
【課題】推力リップルを正確に測定して補正することができる技術の提供。
【解決手段】少なくとも一方向に移動可能に設けられた移動体と、前記移動体に接続された可動要素と、当該可動要素を変位させる固定要素とを有する駆動部と、前記駆動部に通電して前記可動要素に推力を発生させる制御部と、前記駆動部における可動要素と固定要素の相対位置を検出する位置検出部と、前記駆動部の可動要素を駆動させて、当該駆動部に発生する誘起電圧を測定する測定部と、測定した誘起電圧と前記駆動部の相対位置とから、当該駆動部で発生する推力の変動である推力リップルを補正する推力リップル補正値を算出し、当該補正値を用いて前記駆動部に対する指令に乗算する補正演算部とを具備する。
(もっと読む)
1 - 8 / 8
[ Back to top ]