
Fターム[5H560BB02]の内容
無整流子電動機の制御 (40,007) | 電動機の構造 (6,076) | 電機子巻線 (3,737) | 1相 (122)
Fターム[5H560BB02]に分類される特許
1 - 20 / 122
半導体装置
H型ブリッジ回路およびモータ駆動装置
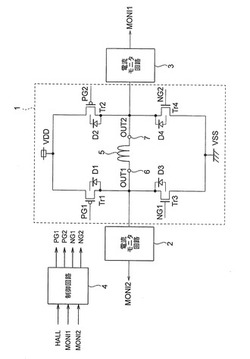
【課題】モータに適用した場合に、回転効率を犠牲にすることなく、逆流電流の発生を防止できるようにしたH型ブリッジ回路などの提供。
【解決手段】この発明は、MOSトランジスタTr1〜Tr4からなるH型ブリッジ1と、電流モニタ回路2、3と、制御回路4とを備える。電流モニタ回路2、3のそれぞれは、コイル5に流れる電流を検出し、この検出に応じた信号を電流判定信号MONI1、電流判定信号MONI2として出力する。制御回路4は、コイル5の通電方向を切り換える切換信号HALLと、電流モニタ回路2、3から出力される電流判定信号MONI1、MONI2とを基に、制御信号PG1、PG2、NG1、NG2を生成し、MOSトランジスタTr1、Tr2をオンオフ制御する。
(もっと読む)
ブラシレスモータの制御方法

【課題】モータの公差及びモータが作動するときの負荷の公差に関わらずモータの速度を制御可能な、ブラシレスモータの制御方法を提供する。
【解決手段】本発明によるブラシレスモータを制御する方法は、複数の速度の各々の制御値を含むルックアップテーブルを記憶し、速度調整制御値を定期的に得、モータの相巻線を励起させる。速度調整制御値は、励起の位相及び長さの一方を定める。速度調整制御値を得るのに、モータの速度を測定し、測定された速度が閾値よりも大きいとき又は小さいとき、速度調整変数を定数だけ増大させ又は減少させ、測定された速度を用いて、制御値をルックアップテーブルから選択し、速度調整変数を用いて、選択された制御値を調整して、速度調整制御値を得る。本発明は、上記方法を実行する制御システム、及び、ブラシレスモータ及び制御システムを有するモータ組立体にも関する。
(もっと読む)
単相ブラシレスモータ制御装置
【課題】単相コイルで構成されるモータにおいても、追加部品を必要とせず、駆動回路や電源回路などの耐圧破壊を防ぐ過電圧保護回路を備えた単相ブラシレスモータ制御装置を提供する。
【解決手段】モータコイル13を駆動するドライバ回路11と、ロータの位置を検出した信号と、ドライバ回路11の出力とに基づいて、ドライバ回路11を構成するドライバ回路用スイッチング素子M11〜M14の制御信号を生成するプリドライバ10と、ドライバ回路11の出力の電位が電源電圧から予め設定されたしきい値以上の電位に上昇したとき、回生経路を形成する過電圧検出回路12と、回生経路を構成する回生経路用スイッチング素子とを備える。
(もっと読む)
モータ駆動装置
【課題】本発明は、目標速度を維持しながら、駆動電流の過電流を防止できるモータ駆動装置に関する。
【解決手段】本発明は、ホール(Hall)センサーの検出信号によって、PWM信号のデューティを調整し、上記デューティの全体区間のうち少なくとも一部区間のデューティ値は、制御しようとする目標デューティ値より高く、少なくとも他の一部区間のデューティ値は、制御しようとする目標デューティ値より低く、上記デューティの全体区間の平均デューティ値は、上記目標デューティ値を追従するようにするデューティ調整部と、外部からのPWM制御信号が入力され、上記デューティ調整部のデューティ調整によって、デューティが調整されるPWM信号を生成する信号生成部と、上記ホール(Hall)センサーの検出信号及び上記信号生成部のPWM信号によってモータ駆動を制御する駆動制御部と、を含むモータ駆動装置を提供する。
(もっと読む)
ブラシレスモータを始動させる方法
【課題】ロータ位置センサの位置の公差に厳しい精度が要求されない、ブラシレスモータの始動方法を提供する。
【解決手段】本発明は、ブラシレスモータを始動させる方法に関する。ブラシレスモータ(1)は、ロータ(2)と、少なくとも1つの相巻線(4)を有するステータ(3)と、ロータ位置センサ(5)を有する。上記方法は、巻線(4)を励起させ、ロータ位置センサ(5)が出力した信号を感知することを含む。信号のエッジを第1期間の間に感知した場合には、エッジに応答して、巻線(4)を整流する。信号のエッジを第1期間の間に感知しない場合には、第1期間の終了時に巻線(4)を整流し、信号を感知し、第2期間の間に感知した信号の2つのエッジのうちの第2のエッジに応答して巻線(4)を整流する。
(もっと読む)
PWM信号出力回路
【課題】モータ駆動回路にソフトスイッチングを実行させつつモータを安定に回転させることができるPWM信号出力回路を提供する。
【解決手段】PWM信号に基づいてモータを駆動する駆動回路に対し、PWM信号を出力するPWM信号出力回路であって、モータの回転速度に応じた周期を有するとともに論理レベルが交互に変化する速度信号に基づいて速度信号の周期の検出する検出部と、検出部で検出された周期内の一方の論理レベル期間内でモータのモータコイルに流れる電流を増加させた後に減少させるためのPWM信号を生成する第1生成部と、周期内の他方の論理レベル期間内で所定のデューティ比のPWM信号を生成する第2生成部と、を備える。
(もっと読む)
PWM信号出力回路
【課題】モータに流れる電流が急激に変化することを抑制しつつ静かにモータを回転させることができるPWM信号出力回路を提供する。
【解決手段】第1のデューティ比のPWM信号を出力する第1出力部と、モータの回転速度に応じた周期を有するとともに論理レベルが交互に変化する速度信号の論理レベルが変化すると、速度信号の論理レベルが変化してから速度信号の論理レベルが次に変化するまでの間に、モータのモータコイルに流れる電流を増加させた後に減少させるべくデューティ比が第2のデューティ比に向かって上昇した後に第2のデューティ比から低下するPWM信号を出力する第2出力部と、速度信号の論理レベルが変化してから速度信号の論理レベルが次に変化するまでの間に、デューティ比が入力信号のデューティ比に向かって上昇した後に入力信号のデューティ比から低下するPWM信号を出力する第3出力部と、を備える。
(もっと読む)
PWM信号出力回路
【課題】回路規模を抑制しつつモータコイルの電流を緩やかに変化させることができるPWM信号出力回路を提供する。
【解決手段】PWM信号に基づいてモータを駆動する駆動回路に対し、PWM信号出力回路は、モータの回転速度に応じて、速度信号が一方の論理レベル及び他方の論理レベルとなる夫々の期間を検出する検出部で検出された期間を第1〜第3の期間に分割する分割部と、第1の期間において、モータコイルに流れる電流を増加させるべく、PWM信号のデューティ比が段階的に変化するようPWM信号のデューティ比を制御して出力する第1出力部と、第2の期間において、モータコイルに流れる電流を一定とすべく、入力信号のデューティ比となるようPWM信号を制御して出力する第2出力部と、第3の期間において、モータコイルに流れる電流を減少させるべく、段階的に変化するようPWM信号のデューティ比を制御して出力する第3出力部と、を備える。
(もっと読む)
単相ブラシレスモータの駆動回路
【課題】 ホール素子などの位置検出素子を用いないで単相ブラシレスモータを駆動することで、モータの小型化や低コスト化を実現する。
【解決手段】 非通電期間を挟んで、単相ブラシレスモータの駆動コイルに第1駆動電流と第2駆動電流とを交互に供給するための駆動信号を生成する駆動信号生成回路と、駆動信号に応じて駆動コイルに第1または第2駆動電流を供給する出力回路と、非通電期間に、駆動コイルに発生する誘起電圧のゼロクロスを検出するゼロクロス検出回路と、を有し、駆動信号生成回路は、通電期間の開始から、ゼロクロス検出回路がゼロクロスを検出するまでの駆動周期を計測しつつ、ゼロクロス検出回路がゼロクロスを検出した場合には、計測した駆動周期に基づいて次の通電期間の長さを決定し、ゼロクロス検出回路がゼロクロスを検出しない場合には、直前の通電期間の長さを次の通電期間の長さとして決定する。
(もっと読む)
単相ブラシレスモータの駆動回路
【課題】 ホール素子などの位置検出素子を用いないで単相ブラシレスモータを駆動することで、モータの小型化や低コスト化を実現する。
【解決手段】 単相ブラシレスモータの駆動コイルに第1の駆動電流、および前記第1の駆動電流と反対方向の第2の駆動電流をいずれも供給しない非通電期間を挟んで、前記駆動コイルに前記第1の駆動電流と前記第2の駆動電流とを交互に供給するための駆動信号を生成する駆動信号生成回路と、前記駆動信号に応じて前記駆動コイルに前記第1または第2の駆動電流を供給する出力回路と、前記非通電期間に、前記駆動コイルに発生する誘起電圧のゼロクロスを検出するゼロクロス検出回路と、を有し、前記駆動信号生成回路は、前記出力回路が前記駆動コイルに前記第1または第2の駆動電流を供給する通電期間の開始から、前記ゼロクロス検出回路が前記ゼロクロスを検出するまでの駆動周期に基づいて、次の通電期間の長さを決定する。
(もっと読む)
単相ブラシレスモータの駆動回路
【課題】 ホール素子などの位置検出素子を用いないで単相ブラシレスモータを駆動することで、モータの小型化や低コスト化を実現する。
【解決手段】 単相ブラシレスモータの駆動コイルに第1および第2駆動電流をいずれも供給しない非通電期間を挟んで、駆動コイルに第1駆動電流と第2駆動電流とを交互に供給するための駆動信号を生成する駆動信号生成回路と、駆動信号に応じて駆動コイルに第1または第2駆動電流を供給する出力回路と、非通電期間に、駆動コイルに発生する誘起電圧のゼロクロスを検出するゼロクロス検出回路と、を有し、駆動信号生成回路は、出力回路が駆動コイルに第1または第2駆動電流を供給する通電期間の開始から、ゼロクロス検出回路がゼロクロスを検出するまでの駆動周期に基づいて、次の通電期間の長さを決定し、ゼロクロス検出回路は、非通電期間の開始から所定時間経過後にゼロクロスの検出を開始する。
(もっと読む)
ロボット及び移動体
【課題】供給電圧の変更に柔軟に対応可能なモータ制御技術を提供する。
【解決手段】駆動制御回路(200)は、電磁コイルに供給電圧VSUPを断続的に供給するためのドライバ回路(250)と、ドライバ回路(250)に供給するスイッチング信号を生成するスイッチング信号生成回路(240)と、供給電圧指令値Yaをスイッチング信号生成回路(240)に供給する電圧設定部(270)とを備える。スイッチング信号生成回路(240)は、供給電圧指令値Yaに応じてスイッチング信号DRVA1,DRVA2のパルス幅を調整することによって、電磁コイルに印加される実効電圧を調整する。
(もっと読む)
モータ駆動回路、方法およびそれを用いた冷却装置、電子機器
【課題】より効率的にモータを駆動可能な駆動装置を提供する。
【解決手段】ゼロクロス検出コンパレータ10は、ファンモータ6のロータの位置を示す互いに逆相のホール信号のペアH+、H−を比較し、それらが交差するゼロクロスタイミングごとにレベルが遷移するゼロクロス検出信号S1を生成する。制御回路20は、ゼロクロス検出信号S1を受け、(1)ゼロクロスタイミングごとに駆動相を切りかえ、モータを回転駆動するとともに、(2)各ゼロクロスタイミングより第1時間幅τ1前の第1時刻から、各ゼロクロスタイミングより第1時間幅τ1よりも短い第2時間幅τ2後の第2時刻までの間、モータを回生制御する。
(もっと読む)
モータ駆動回路
【課題】単相ブラシレスDCモータの起動時の回転数が安定するとともに、逆起電圧および騒音の発生を抑制する。
【解決手段】モータ1の制御部13は、位置推定部14と、カウンタ部15と、出力波形生成部16と、PWM生成部17とを有する。モータ1の起動時のソフトスイッチング動作として、コイル7に一定のデューティ比のパルス状の駆動電圧を印加する期間T3の直後に、時間の経過とともにパルス幅が小さくなる駆動電圧を印加する期間T4を設けるため、コイル7への逆起電力の発生を確実に防止でき、騒音が軽減され、振動も抑制できる。
(もっと読む)
正逆回転可能なDCブラシレスモータ
【課題】3相以上のブラシレスモータを正逆回転させるよりも制御が容易でかつ安価な、ブラシ及び整流子を用いることなく直流電流で正回転、逆回転の双方向に回転する単相全波整流型又は2相半波整流型DCブラシレスモータを提供する。
【解決手段】上記課題を解決するため、回転子である磁石の極位置を検出する位置センサを備え、前記位置センサの磁極検出信号の出力によりスイッチング素子のオンオフを制御し、ステータに巻かれたコイルへの通電方向を変更する単相全波整流型又は2相半波整流型DCブラシレスモータにおいて、前記位置センサから前記スイッチング素子を制御する回路へ入力する2つの磁極検出信号を入れ替えることで、前記回転子を逆回転させることを特徴とする正逆回転可能なDCブラシレスモータの構成とした。
(もっと読む)
モータ駆動回路
【課題】モータを低速で起動可能としつつもソフトスタート機能を担保する。
【解決手段】
一方の論理レベルのデューティー比が第1デューティー比の第1パルス信号を生成するパルス生成回路と、モータの回転に応じた回転信号に基づいて、モータが停止している状態から回転を開始する際は第1デューティー比で駆動電流をモータコイルに供給し、モータが回転を開始した後は、モータの目標回転速度に応じて一方の論理レベルの第2デューティー比が高くなる第2パルス信号の第2デューティー比で駆動電流をモータコイルに供給する駆動制御回路と、を備え、パルス生成回路は、第2デューティー比と異なる第1デューティー比の第1パルス信号を生成すること、を特徴とする。
(もっと読む)
モータユニットおよびモータ駆動装置
【課題】簡易な回路構成でありながら、電源ラインの電圧降下および電圧損失を抑制可能なモータ駆動回路を提供する。
【解決手段】モータユニット1は、DCモータ2と、一対の直流受電端子3a,3bと、制御回路部4と、整流回路部5と、整流制御部6とを備えている。一対の直流受電端子3a,3bの設定電圧が入れ替わっても、制御回路部4の電源端子4pには、必ず第1の基準電圧Vccが供給されて、制御回路部4の接地端子4gには、必ず第2の基準電圧Vssが供給されるように整流制御部6で制御する。このため、一対の直流受電端子3a,3bに供給される電圧極性が変化しても、DCモータ2が逆回転するおそれはなく、モータ2の安定動作が保証される。
(もっと読む)
電気機械の制御
【課題】電気機械を制御する方法を提供すること。
【解決手段】方法が、ロータ位置信号のエッジを基準エッジとして選択するステップと、基準エッジに関連する時点で電気機械の相巻線を転流するステップとを含む。ロータ位置信号は、機械的サイクル当たり少なくとも4つのエッジを有し、エッジの各々は、逆起電力のそれぞれのゼロ交差又は相巻線のインダクタンスの最小値に関連する。それぞれのゼロ交差又は最小値に対するエッジの少なくとも1つの角度位置は、他のエッジのものとは異なる。従って、基準エッジは、それぞれのゼロ交差又は最小値に対する基準エッジの角度位置が電気機械の電源オンごとに同じになるようにこれらのエッジから選択される。また、この方法を実施するコントローラ及び制御システムも提供する。
(もっと読む)
モータ駆動回路
【課題】位置センサの検出信号が変動しても、単相ブラシレスDCモータを安定して駆動可能とする。
【解決手段】モータ駆動回路11は、インバータ回路12と、位置センサ6と、外部から供給される速度指令信号と位置検出信号とに基づいてインバータ回路12を制御する制御部13と、を備える。制御部13は、マグネットロータが直前に1回転した時間間隔を単相ブラシレスDCモータの磁極数で割って得られる平均時間に基づいて位相が決定される位置信号を生成する位置推定部14と、位置信号のゼロクロス点の間の時間間隔を所定周期でカウントして、マグネットロータの1回転分の時間に対応するカウント値を出力するカウンタ部15と、速度指令信号およびカウント値に基づいて、位置信号に同期した変調信号を生成する出力波形生成部16と、変調信号を、インバータ回路を制御するためのPWM信号に変換するPWM生成部17と、を有する。
(もっと読む)
1 - 20 / 122
[ Back to top ]