
Fターム[5H560EC01]の内容
無整流子電動機の制御 (40,007) | 電子整流子機構の出力基本波形 (1,038) | 正弦波 (475)
Fターム[5H560EC01]に分類される特許
201 - 220 / 475
電動機駆動制御装置、それを備えた車両および電動機駆動制御方法
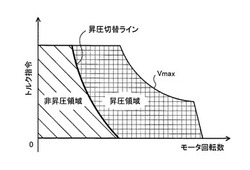
【課題】電圧変換手段により直流電源側の電圧に対して電動機駆動回路側の電圧がより適正に昇圧されるようにして電動機を駆動制御する際の効率をより向上させる。
【解決手段】ハイブリッド自動車20では、モータの動作領域を非昇圧領域と昇圧領域とに区分けする目標昇圧後電圧設定用マップに従って、モータの目標動作点が昇圧領域に含まれるときにインバータ側の電圧である昇圧後電圧がモータの目標動作点に応じた目標昇圧後電圧になるように昇圧コンバータが制御される。目標昇圧後電圧設定用マップは、昇圧後電圧の非昇圧時におけるモータの駆動に伴う損失が昇圧後電圧の昇圧時における損失よりも小さくなる領域が非昇圧領域に含まれると共に、上記昇圧時における損失が上記非昇圧時における損失よりも小さくなる領域が昇圧領域に含まれるように作成されている。
(もっと読む)
車両の制御装置および制御方法

【課題】蓄電装置の電力を昇圧して出力するコンバータと、コンバータから出力される電力を変換して車両駆動用モータに出力するインバータとを備えた車両において、コンバータの出力電圧を増加させる際に、指令値どおりのトルクをモータに出力させる。
【解決手段】矩形電圧制御部3300は、トルク指令値Trqcomなどに基づく矩形波電圧制御によってインバータ14を制御することにより、交流モータM1の出力トルクを制御する。システム電圧制御部3400は、コンバータ12の出力電圧であるシステム電圧HVを制御する。システム電圧制御部3400は、アクセル開度などに基づいてシステム電圧指令値VHcomの制限を解除して増加させる。協調制御部3500は、VHcomを増加させる際、インバータ14の矩形波電圧制御中であると、VHcomとTrqcomとを協調させて増加させる。
(もっと読む)
電動機駆動制御装置、それを備えた車両および電動機駆動制御方法
【課題】直流電源側の電圧に対する電動機駆動回路側の電圧を調整可能な電圧調整手段での共振の発生に起因した不具合の発生を抑制しつつ電動機の出力やエネルギ効率の向上を図る。
【解決手段】ハイブリッド自動車20では、モータMG1またはMG2の目標動作点が昇圧コンバータ55で共振が発生するときのモータMG1,MG2の動作点を含む所定の共振域に含まれるときに、インバータ41,42側の電圧がバッテリ50側の電圧よりも高い所定の目標昇圧後電圧VHtagになるように昇圧コンバータ55が制御されると共に、正弦波PWM制御方式を用いてインバータ41,42が制御される(ステップS110,S120,S140およびS150)。
(もっと読む)
モータ駆動装置および半導体集積回路装置
【課題】ブラシレスモータの起動時間を短縮し、騒音、および振動を大幅に低減する。
【解決手段】セレクタ21は、モード信号MODEBに基づいて、符号部20から出力されるリミット信号Limit、またはFull−On信号のいずれかを選択して出力する。セレクタ31は、MPU25からのモード信号MODEBに基づいて、出力デコーダ28,29のいずれか信号を選択して出力する。セレクタ30は、モード信号COMMODEに基づいて、出力デコーダ26、出力デコーダ27、またはセレクタ31の出力信号のいずれか信号を選択して出力する。出力デコーダ28と出力デコーダ29とは、モード信号MODEBに基づいて、セレクタ31により選択可能であり、出力デコーダ28が選択された場合には、相通電となり、出力デコーダ29が選択されると3相通電となる。
(もっと読む)
回転電機制御装置
【課題】回転電機の制御において、電圧振幅を新しい考え方で決定し、広い電圧範囲で回転電機の駆動制御を可能とすることである。
【解決手段】回転電機駆動システム10は、回転電機12と、蓄電装置22と電圧変換器24とインバータ26を有する電源回路20と、指令値生成部30と、回転電機制御装置40とを備えて構成される。回転電機制御装置40は、三相−dq変換器42と、微分器44と、トルク推定値取得部46と、トルク推定値とトルク指令値とから電圧位相ψを算出する電圧位相算出部48と、無効電力を含んでいる皮相電力を算出する電力算出部50と、電流算出部52と、皮相電力と電流とから電圧振幅Vを算出する電圧振幅算出部54と、電圧位相ψと電圧振幅Vとに基づいて制御信号を生成する制御信号生成部56とを含んで構成される。
(もっと読む)
逆流検出方法及び装置並びにモータ駆動方法及び装置
【課題】同期整流式のPWMモータ駆動に好適な相電流の逆流検出を実現する。さらに、そのような逆流検出を応用して低振動性及び低騒音性を維持しつつ電源への相電流の回生を抑制することができるモータ駆動を実現する。
【解決手段】逆流検出装置(20)は、モータ(100)におけるモータコイルにソース電流又はシンク電流を通電すべきタイミングを示すタイミング信号及びパワ段(19)におけるハーフブリッジに対する制御信号から、モータコイルに対する通電制御が所定の状態にあるか否かを判定し、パワ段(19)の出力電圧と閾値とを比較し、これら結果に基づいて相電流の逆流の有無を検出する。モータ(100)をPWM駆動するモータ駆動装置は、そのような逆流検出装置(20)及びその検出結果に基づいて整流方式を切り替える整流切替部(30)を備えている。
(もっと読む)
インバータ装置
【課題】運転前に直流電源側の電気抵抗診断が可能であり、更には、電気抵抗が大きい場合に電力損失の増大を防止することができるインバータ装置の提供を目的とする。
【解決手段】直流電源に接続されるインバータ回路と、直流電源からの直流電圧を検出する電圧検出器と、モータの運転前においてインバータ回路からモータへ直流電流を出力させて磁石回転子の位置決めを行い、モータの運転時においてはインバータ回路からモータへ交流電流を出力させる制御回路とを備え、磁石回転子の位置決め時、電圧検出器により検出される直流電圧値に基づき直流電源側の電気抵抗を診断する。
(もっと読む)
インバータ装置
【課題】温度センサを用いず、起動時のモータの温度を高い精度で算出し、また、高い精度で運転時のモータの温度を推定することができるインバータ装置の提供を目的とする。
【解決手段】直流電源に接続されるインバータ回路と、インバータ回路の出力電流を検出する電流検出器と、モータの運転前においてインバータ回路からモータへ直流電流を出力させて磁石回転子の位置決めを行い、モータの運転時においてはインバータ回路からモータへ交流電流を出力させる制御回路とを備え、磁石回転子の位置決め時、電流検出器により検出される電流値に基づきモータの固定子巻線の抵抗値を算出し、当該抵抗値に基づいてモータの温度を算出する。
(もっと読む)
回転機の制御装置、及び回転機の制御システム
【課題】チョッパ制御によって、電動機に接続されるコンデンサの電圧を高圧バッテリの電圧に対して所望に変換するに際し、コンデンサの電圧を電動機の制御によって要求される交流電圧とすることが困難なこと。
【解決手段】電動機に対する指令電圧Vuc,Vvc,Vwcをオフセット電圧Δにてオフセットしたものと、コンデンサの実際の電圧VCu、VCv、VCwとの差に基づき、フィードバック制御部68,80,92においてコンデンサ及び電動機側への電流の出力電流の基本値が算出される。フィードフォワード補正部70,82,94では、これを電動機の相電流iMu,iMv,iMwにてフィードフォワード補正することで、コンデンサ及び電動機側へ電流の出力指令値iCuc,iCvc,iCwcを算出する。パルス幅算出部72,84,96では、これに基づきチョッパ制御のオン操作時間を算出する。
(もっと読む)
ブラシレスDCモータ及び撮像装置
【課題】負荷変動に伴う速度変動を比較的簡単な構成で低減するブラシレスDCモータをを提供する。
【解決手段】被駆動部材2、3を駆動するブラシレスDCモータ1は、磁石12を備えたロータ21と、磁石12に回転力を与えるコイル13、14を有するステータ22と、ロータ21の回転位置に応じて周期的な第1の信号Kを出力する位置検出手段15、16と、位置検出手段15、16から出力される第1の信号Kの位相に進角を加えることによって第2の信号Jを生成する信号生成手段8と、第2の信号Jに従ってコイル13、14への励磁を切り替える励磁切り替え手段7と、被駆動部材2、3の位置及び移動方向の少なくても一方に応じて進角を変更する位相変更手段9、10、11とを有する。
(もっと読む)
EPS用モータ駆動装置
【課題】ドライバーに違和感を与えることなくレスポンスを改善可能なEPS用モータ駆動装置を提供すること。
【解決手段】急操舵時に2相変調モードでEPS用モータを駆動し(S108)、通常操舵時に3相正弦波変調モードでEPS用モータをブラシレスDCモータを駆動する(S106)。
(もっと読む)
モータ制御装置
【課題】モータパラメータを正確に同定することによってロータ回転位置の推定精度を向上する。
【解決手段】マイクロコンピュータ7は、パラメータ同定のための参照信号を生成する参照信号生成部23と、二相指示電圧Vαβと二相検出電流Iαβとに基づいてモータパラメータを同定するパラメータ同定部22と、同定されたモータパラメータに基づいてロータの回転位置を推定する位置推定部21とを備えている。パラメータ同定部22は、補償項を導入したモータモデルv=(R+pL)i+ε(ただし、vはモータに印加される電圧、Rはステータ巻線抵抗、Lはモータのインダクタンス、pは微分演算子、iはモータ電流、εは電流応答に依存しない補償項)に基づいてモータパラメータを同定する。
(もっと読む)
モータ制御装置
【課題】位置推定の周期を長くすることなく、位置推定の分解能を向上することができるモータ制御装置を提供する。
【解決手段】センシング信号生成部21は、所定のセンシング周波数のセンシング信号を生成する。このセンシング信号がモータ3のステータに注入される。センシング信号に対するモータ3の応答が電流センサ9によって検出される。位置推定部20は、所定のサンプリング周波数でサンプリングされるモータ電流波形のピークに基づき、ロータの回転位置を推定する。センシング周波数は、サンプリング周波数が当該センシング周波数の非整数倍となるように定められている。これにより、時間軸上で隣接するセンシング信号周期間で、各センシング信号周期中での電流サンプリングタイミングがずらされている。
(もっと読む)
モータ制御回路,車両用ファン駆動装置及びモータ制御方法
【課題】ブラシレスDCモータを180°未満の通電角の駆動信号を用いたセンサレス制御方式により駆動制御する場合でも、異音の発生を抑制しつつ確実に起動させる。
【解決手段】駆動装置1の起動制御手段23は、車両用のファン6を回転させるモータ7について、センサレス制御を適用できない停止状態又は低速回転状態にある場合に上位コントローラ2により起動指令が与えられると、相補PWM制御による擬似的な正弦波状の駆動信号を印加する強制転流によってモータ7を起動した後に、180°未満の通電角で矩形波状の駆動信号を用いたセンサレス制御に切替える。
(もっと読む)
モータ駆動装置および半導体集積回路装置
【課題】起動から定常回転数に至るまでのブラシレスモータの騒音、および振動を大幅に低減する。
【解決手段】ブラシレスモータが停止から定常回転数までにおいて、演算シーケンサ32がクロック信号CARYCLKの立ち上りを検出すると電流制御演算を実行する。続いてクロック信号の立ち下がりを検出すると、演算シーケンス32bが分割制御信号DIVCNTに変化があったか否かを判断し、変化があるとソフトスイッチ演算を実行する。分割制御信号に変化がないまたはソフトスイッチ演算の終了後、演算シーケンサ32はPWMキャリア信号CARYCLKの1周期内にマスク信号MASKの立ち上がりがあるかを判定し、該信号の立ち上がりがない場合には最初の処理に戻り、信号の立ち上がりがあるとPLL制御演算を実行し、その後最初の処理に戻る。
(もっと読む)
モータ駆動装置
【課題】モータを空転状態にする際に発生する逆起電圧の検出に関する問題を解決したうえで、モータを故意に空転状態とすることを含む起動シーケンスを行うことができるモータ駆動装置を提供する。
【解決手段】モータコイル11U、11V、11Wのうち、ある1相のコイルの端子電圧と、中性点電圧もしくはある1相のコイルを除く他の2相のコイルの端子電圧の平均値とを比較する比較部40を備える。停止中のモータを駆動する際には、強制的に起動した後にモータをいったん空転状態とするが、空転状態とした直後から一定期間、比較部40による比較結果をマスクするようにした。
(もっと読む)
ブラシレスDCモータの駆動装置及び冷蔵庫の圧縮機およびブラシレスDCモータの駆動方法
【課題】ブラシレスDCモータの低速時の波形出力手段から高速時の波形出力手段に切り替える際、もしくは、その逆に切り替える際のモータ挙動の変動防止を図る。
【解決手段】通電角が120度以上180度未満の矩形波またはそれに準じる波形を出力する波形発生手段と、通電角が120度を超え180度未満の矩形波・正弦波またはそれに準じる波形を所定周波数で出力するとともに、デューティを一定として所定周波数のみを変化させるような波形発生手段とを、運転状態によって切り替える際のモータ挙動の変動を抑えることが可能となり、騒音発生・脱調の抑制、さらには、瞬間的なピーク電流を低減することで、冷蔵庫の不冷・鈍冷やモータの寿命信頼性に及ぼす影響を取り除くことができる。
(もっと読む)
ブラシレスモータのセンサレス制御装置
【課題】 高コストのCPUを使用しなくても、演算処理を行うことが可能で、しかも、制御対象のブラシレスモータが変わっても、演算処理プログラムを変更する必要がないブラシレスモータのセンサレス制御装置を提供する。
【解決手段】 d軸電流の電流値と指令値とに基づいてロータの補正角度を算出する角度制御部17と、所定時間経過する間の角度変化量から現在のロータの速度を算出する速度算出部18と、前回サンプリング時に得られたロータの角度、角度制御部で得られた補正角度および速度算出部で得られた速度を使用して現在のロータの角度を算出する角度算出部19と、起動時における角度制御部17への指令値として位相が遅れる方向の初期値を与える起動指令部20とを備えている。
(もっと読む)
モータ駆動装置
【課題】ロータの磁極位置を検出する位置検出センサーによりモータを正弦波駆動するブタシレスモータの駆動回路において、ギヤ負荷の種類、ギヤの材質、バックラッシュの量、負荷量によって発生する起動時の不具合を改善したモータ制御装置を提供する。
【解決手段】起動時に矩形波駆動を選択し、それ以外は正弦波駆動を用い、ロータ17の磁極位置を検出する位置センサー60u、v、wの出力信号のパルス間の時間を測定することでロータ位置角度を推定することにより正弦波駆動信号を生成する駆動方式において、起動時に矩形波駆動から正弦波駆動への切換えを、起動信号STから一定時間経過した後切り換えるようにするためのタイマ回路34を設けた。
(もっと読む)
永久磁石同期電動機のV/f制御装置
【課題】永久磁石同期電動機の端子電圧信号からの磁極位相検出を確実、容易にして超高速運転および空転状態からの再起動ができる。
【解決手段】180度通電正弦波駆動・位置センサレス・交流電流センサレスの装置構成にしたV/f制御装置において、電圧検出器8で検出する同期電動機の3相端子電圧と3相の中性点電位を比較、または相電圧間の比較もしくは端子電圧を積分した磁束情報により、相電圧/線間電圧/磁束の正負の位相パルスとして検出し、この位相パルス信号のエッジをリセットタイミングとして位相検出用の積分器をリセットし、かつエッジの位相に応じたリセット値に積分器をリセットし、これに並行してエッジをリセットタイミングとするカウンタによって端子電圧位相と同期したカウンタ値を得、このカウンタ値を同期電動機の速度情報とし、この速度情報を積分器で積分することで位相情報を求める。
(もっと読む)
201 - 220 / 475
[ Back to top ]